Rapoo(雷柏) V820是一款游戏机械键盘,采用雷柏自主机械轴,双色注塑键帽,5个独立游戏G键,全尺寸一体式掌托,USB口109键无冲突,109键可编程,12种背光模式,加厚金属上盖。
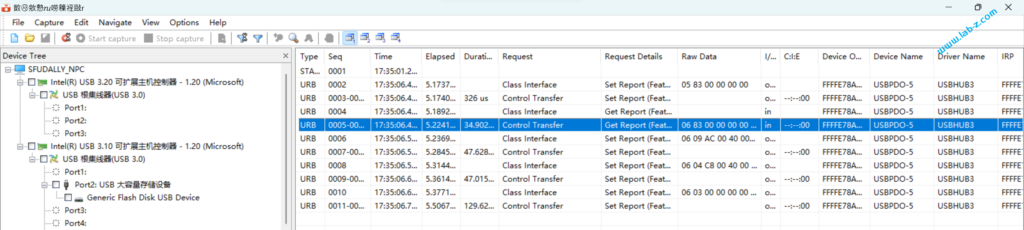
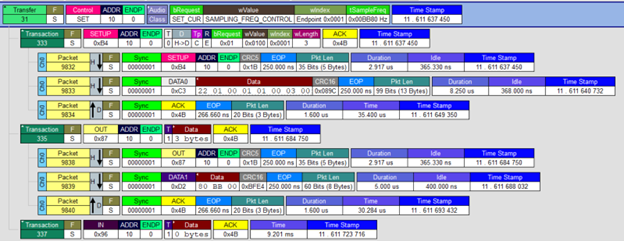
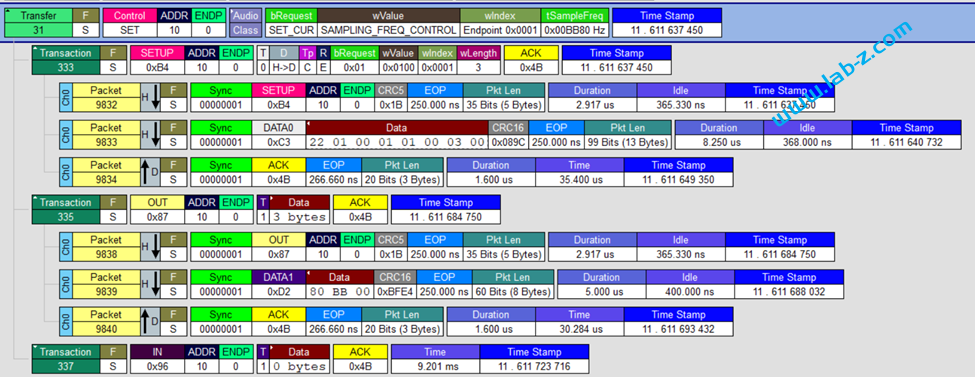
它自带了一个颜色控制的程序,经过研究总结出了它的控制方法。使用 USBLyzer 抓取它设置的动作发现应用程序会对设备发送几个 Package。
经过多次实验,确定了2个 Pacakge 是必须的,发送之后键盘会改变LED颜色。第一个是下面代码中的cmdBuffer定义的,第二个是LedBuffer中定义的,所有颜色信息都是通过这个提供给键盘的。LedBuffer[8] 开始是按键的Blue;LedBuffer[140]开始是按键的 Red取值;LedBuffer[272] 开始为 Green 取值。
按键偏移总结如下:
#include <stdio.h>
#include <wchar.h>
#include <string.h>
#include <stdlib.h>
#include "hidapi.h"
int Asc2KeyLEDOffset(char asc) {
int KeyOffset;
switch (asc) {
case '~':
case '`':
KeyOffset = 30;
break;
case '!':
case '1':
KeyOffset = 31;
break;
case '@':
case '2':
KeyOffset = 32;
break;
case '#':
case '3':
KeyOffset = 33;
break;
case '$':
case '4':
KeyOffset = 34;
break;
case '%':
case '5':
KeyOffset = 35;
break;
case '^':
case '6':
KeyOffset = 36;
break;
case '&':
case '7':
KeyOffset = 37;
break;
case '*':
case '8':
KeyOffset = 38;
break;
case '(':
case '9':
KeyOffset = 39;
break;
case ')':
case '0':
KeyOffset = 40;
break;
case '_':
case '-':
KeyOffset = 41;
break;
case '+':
case '=':
KeyOffset = 42;
break;
case 'Q':
case 'q':
KeyOffset = 53;
break;
case 'W':
case 'w':
KeyOffset = 54;
break;
case 'E':
case 'e':
KeyOffset = 55;
break;
case 'R':
case 'r':
KeyOffset = 56;
break;
case 'T':
case 't':
KeyOffset = 57;
break;
case 'Y':
case 'y':
KeyOffset = 58;
break;
case 'U':
case 'u':
KeyOffset = 59;
break;
case 'I':
case 'i':
KeyOffset = 60;
break;
case 'O':
case 'o':
KeyOffset = 61;
break;
case 'P':
case 'p':
KeyOffset = 62;
break;
case '{':
case '[':
KeyOffset = 63;
break;
case '}':
case ']':
KeyOffset = 64;
break;
case '|':
case '\\':
KeyOffset = 65;
break;
case 'A':
case 'a':
KeyOffset = 75;
break;
case 'S':
case 's':
KeyOffset = 76;
break;
case 'D':
case 'd':
KeyOffset = 77;
break;
case 'F':
case 'f':
KeyOffset = 78;
break;
case 'G':
case 'g':
KeyOffset = 79;
break;
case 'H':
case 'h':
KeyOffset = 80;
break;
case 'J':
case 'j':
KeyOffset = 81;
break;
case 'K':
case 'k':
KeyOffset = 82;
break;
case 'L':
case 'l':
KeyOffset = 83;
break;
case ':':
case ';':
KeyOffset = 84;
break;
case '"':
case '\'':
KeyOffset = 85;
break;
case 'Z':
case 'z':
KeyOffset = 98;
break;
case 'X':
case 'x':
KeyOffset = 99;
break;
case 'C':
case 'c':
KeyOffset = 100;
break;
case 'V':
case 'v':
KeyOffset = 101;
break;
case 'B':
case 'b':
KeyOffset = 102;
break;
case 'N':
case 'n':
KeyOffset = 103;
break;
case 'M':
case 'm':
KeyOffset = 104;
break;
case '<':
case ',':
KeyOffset = 105;
break;
case '>':
case '.':
KeyOffset = 106;
break;
case '?':
case '/':
KeyOffset = 107;
break;
case ' ':
KeyOffset = 123;
break;
default:
KeyOffset = 0;
break;
}
return KeyOffset;
}
//#pragma comment (lib,"setupapi.lib")//hidapi所需的lib环境,没有此文件会导致链接错误
// Headers needed for sleeping.
#ifdef _WIN32
#include <windows.h>
#else
#include <unistd.h>
#endif
// Fallback/example
#ifndef HID_API_MAKE_VERSION
#define HID_API_MAKE_VERSION(mj, mn, p) (((mj) << 24) | ((mn) << 8) | (p))
#endif
#ifndef HID_API_VERSION
#define HID_API_VERSION HID_API_MAKE_VERSION(HID_API_VERSION_MAJOR, HID_API_VERSION_MINOR, HID_API_VERSION_PATCH)
#endif
//
// Sample using platform-specific headers
#if defined(__APPLE__) && HID_API_VERSION >= HID_API_MAKE_VERSION(0, 12, 0)
#include <hidapi_darwin.h>
#endif
#if defined(_WIN32) && HID_API_VERSION >= HID_API_MAKE_VERSION(0, 12, 0)
#include "hidapi_winapi.h"
#endif
#if defined(USING_HIDAPI_LIBUSB) && HID_API_VERSION >= HID_API_MAKE_VERSION(0, 12, 0)
#include <hidapi_libusb.h>
#endif
//
int res;
unsigned char cmdBuffer[5] = { 0x05, 0x83, 0x00, 0x00, 0x00 };
unsigned char LedBuffer[1032] = {
0x06, 0x09, 0xac, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
const char* hid_bus_name(hid_bus_type bus_type) {
static const char* const HidBusTypeName[] = {
"Unknown",
"USB",
"Bluetooth",
"I2C",
"SPI",
};
if ((int)bus_type < 0)
bus_type = HID_API_BUS_UNKNOWN;
if ((int)bus_type >= (int)(sizeof(HidBusTypeName) / sizeof(HidBusTypeName[0])))
bus_type = HID_API_BUS_UNKNOWN;
return HidBusTypeName[bus_type];
}
void print_device(struct hid_device_info* cur_dev) {
printf("Device Found\n type: %04hx %04hx\n path: %s\n serial_number: %ls", cur_dev->vendor_id, cur_dev->product_id, cur_dev->path, cur_dev->serial_number);
printf("\n");
printf(" Manufacturer: %ls\n", cur_dev->manufacturer_string);
printf(" Product: %ls\n", cur_dev->product_string);
printf(" Release: %hx\n", cur_dev->release_number);
printf(" Interface: %d\n", cur_dev->interface_number);
printf(" Usage (page): 0x%hx (0x%hx)\n", cur_dev->usage, cur_dev->usage_page);
printf(" Bus type: %d (%s)\n", cur_dev->bus_type, hid_bus_name(cur_dev->bus_type));
printf("\n");
}
void print_hid_report_descriptor_from_device(hid_device* device) {
unsigned char descriptor[HID_API_MAX_REPORT_DESCRIPTOR_SIZE];
int res = 0;
printf(" Report Descriptor: ");
res = hid_get_report_descriptor(device, descriptor, sizeof(descriptor));
if (res < 0) {
printf("error getting: %ls", hid_error(device));
}
else {
printf("(%d bytes)", res);
}
for (int i = 0; i < res; i++) {
if (i % 10 == 0) {
printf("\n");
}
printf("0x%02x, ", descriptor[i]);
}
printf("\n");
}
void print_hid_report_descriptor_from_path(const char* path) {
hid_device* device = hid_open_path(path);
if (device) {
print_hid_report_descriptor_from_device(device);
hid_close(device);
}
else {
printf(" Report Descriptor: Unable to open device by path\n");
}
}
void print_devices(struct hid_device_info* cur_dev) {
for (; cur_dev; cur_dev = cur_dev->next) {
print_device(cur_dev);
}
}
hid_device* Handle05 = NULL;
hid_device* Handle06 = NULL;
void print_devices_with_descriptor(struct hid_device_info* cur_dev) {
for (; cur_dev; cur_dev = cur_dev->next) {
if (cur_dev->vendor_id == 0x24ae) {
if ((strstr(cur_dev->path, "Col05") != NULL) || (strstr(cur_dev->path, "Col06") != NULL)) {
print_device(cur_dev);
print_hid_report_descriptor_from_path(cur_dev->path);
if (strstr(cur_dev->path, "Col05") != NULL) {
Handle05 = hid_open_path(cur_dev->path);
if (!Handle05) {
printf("unable to open device\n");
system("pause");
hid_exit();
return;
}
}
if (strstr(cur_dev->path, "Col06") != NULL) {
Handle06 = hid_open_path(cur_dev->path);
if (!Handle06) {
printf("unable to open device\n");
system("pause");
hid_exit();
return;
}
}
}
}
}
}
void LightAKey(hid_device* Handle1, hid_device* Handle2, char c, UINT8 value)
{
res = hid_send_feature_report(Handle1, cmdBuffer, 5);
if (res < 0) {
printf("Unable to write() Handle05: %ls\n", hid_error(Handle1));
}
LedBuffer[Asc2KeyLEDOffset(c)] = value;
res = hid_send_feature_report(Handle2, LedBuffer, sizeof(LedBuffer));
if (res < 0) {
printf("Unable to write(): %ls Handle06\n", hid_error(Handle2));
}
}
int main(int argc, char* argv[])
{
(void)argc;
(void)argv;
struct hid_device_info* devs;
printf("hidapi test/example tool. Compiled with hidapi version %s, runtime version %s.\n", HID_API_VERSION_STR, hid_version_str());
if (HID_API_VERSION == HID_API_MAKE_VERSION(hid_version()->major, hid_version()->minor, hid_version()->patch)) {
printf("Compile-time version matches runtime version of hidapi.\n\n");
}
else {
printf("Compile-time version is different than runtime version of hidapi.\n]n");
}
if (hid_init())
return -1;
#if defined(__APPLE__) && HID_API_VERSION >= HID_API_MAKE_VERSION(0, 12, 0)
// To work properly needs to be called before hid_open/hid_open_path after hid_init.
// Best/recommended option - call it right after hid_init.
hid_darwin_set_open_exclusive(0);
#endif
devs = hid_enumerate(0x0, 0x0);
print_devices_with_descriptor(devs);
hid_free_enumeration(devs);
/*
res = hid_send_feature_report(Handle05, cmdBuffer, 5);
if (res < 0) {
printf("Unable to write() Handle05: %ls\n", hid_error(Handle05));
}
LedBuffer[Asc2KeyLEDOffset('a')] = 200;
res = hid_send_feature_report(Handle06, LedBuffer, sizeof(LedBuffer));
if (res < 0) {
printf("Unable to write(): %ls Handle06\n", hid_error(Handle06));
}
system("pause");
*/
LightAKey(Handle05, Handle06, 'l', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'a', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'b', 200);
Sleep(800);
LightAKey(Handle05, Handle06, '-', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'z', 200);
Sleep(800);
LightAKey(Handle05, Handle06, '.', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'c', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'o', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'm', 200);
Sleep(800);
LightAKey(Handle05, Handle06, 'm', 0);
Sleep(800);
LightAKey(Handle05, Handle06, 'o', 0);
Sleep(800);
LightAKey(Handle05, Handle06, 'c', 0);
Sleep(800);
LightAKey(Handle05, Handle06, '.', 0);
Sleep(800);
LightAKey(Handle05, Handle06, 'z', 0);
Sleep(800);
LightAKey(Handle05, Handle06, '-', 0);
Sleep(800);
LightAKey(Handle05, Handle06, 'b', 0);
Sleep(800);
LightAKey(Handle05, Handle06, 'a', 0);
Sleep(800);
LightAKey(Handle05, Handle06, 'l', 0);
hid_close(Handle05);
hid_close(Handle06);
/* Free static HIDAPI objects. */
hid_exit();
#ifdef _WIN32
system("pause");
#endif
return 0;
}