2026年2月更新,Step to UEFI 文章索引:
做一个 UEFI 下的 EasyX 图形库(1)
之前我使用过一个 Windows 下的图形库:EasyX(官方网站https://easyx.cn/),它可以帮助用户非常方便的在Windows下实现简单的绘图功能,
美中不足的是这个库并非开源项目,因此无法直接进行迁移。
这次我尝试编写一个 UEFI 下的 EasyX 库,尽量做到完全兼容。代码主要是 AI 生成。
本来打算做成一个库,但是后来考虑到通俗易懂直接方便,索性直接和 Application 写在了一起。这样做更加直截了当,并且方便用户自行剪裁。
测试编写的UEFI Application假设所有内容处于\AppPkg\Applications\EasyXDemo1 目录下,然后在AppPkg\AppPkg.dsc中加入下面这一行:
AppPkg/Applications/EasyXDemo1/EasyXDemo.inf
代码如下:
/** @file
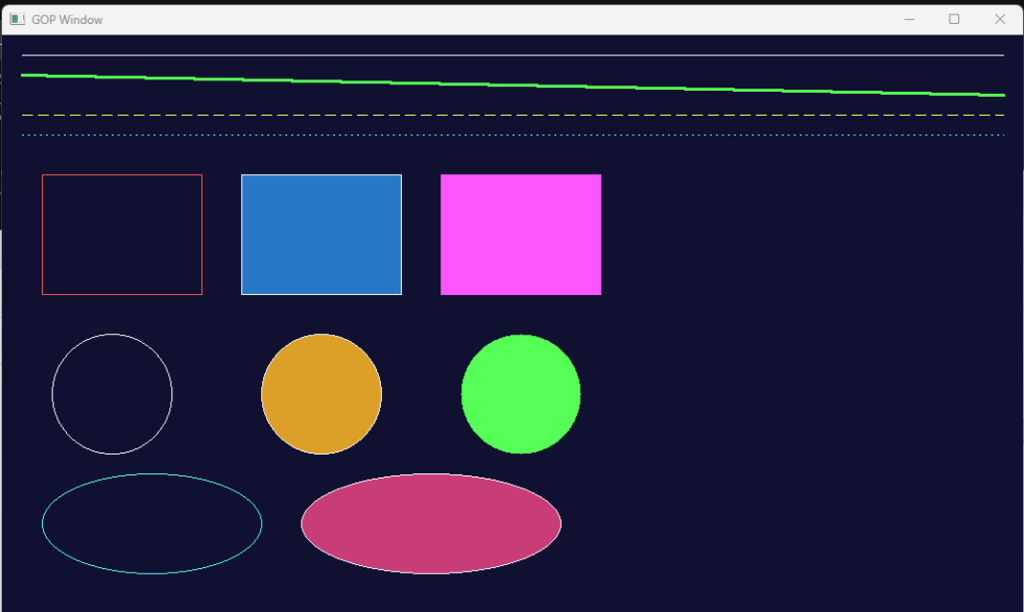
EasyX UEFI 图形库演示程序(阶段 P0 + P1)。
演示:初始化设备、清屏、绘制直线、矩形、圆、椭圆及其填充变体,
然后等待任意按键后退出。
**/
#include <Uefi.h>
#include <Library/UefiBootServicesTableLib.h>
#include <Library/UefiLib.h>
#include "easyx.h"
/**
等待用户按下任意键。
**/
STATIC
VOID
WaitAnyKey (
VOID
)
{
EFI_INPUT_KEY Key;
UINTN Index;
gBS->WaitForEvent (1, &gST->ConIn->WaitForKey, &Index);
gST->ConIn->ReadKeyStroke (gST->ConIn, &Key);
}
/**
程序入口。
**/
EFI_STATUS
EFIAPI
UefiMain (
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
)
{
EFI_STATUS Status;
INT32 W;
INT32 H;
//
// 初始化绘图设备(跟随 GOP 最大分辨率模式)。
//
Status = initgraph (0, 0);
if (EFI_ERROR (Status)) {
Print (L"initgraph 失败: %r\n", Status);
return Status;
}
W = getwidth ();
H = getheight ();
//
// 批量绘图,减少刷新次数。
//
BeginBatchDraw ();
//
// 背景填充深蓝。
//
setbkcolor (RGB (16, 16, 48));
cleardevice ();
//
// 直线:不同颜色/线宽/线型。
//
setlinecolor (WHITE);
setlinestyle (PS_SOLID, 1);
line (20, 20, W - 20, 20);
setlinecolor (LIGHTGREEN);
setlinestyle (PS_SOLID, 3);
line (20, 40, W - 20, 60);
setlinecolor (YELLOW);
setlinestyle (PS_DASH, 1);
line (20, 80, W - 20, 80);
setlinecolor (LIGHTCYAN);
setlinestyle (PS_DOT, 1);
line (20, 100, W - 20, 100);
//
// 矩形。
//
setlinestyle (PS_SOLID, 1);
setlinecolor (LIGHTRED);
rectangle (40, 140, 200, 260);
setfillcolor (RGB (40, 120, 200));
setlinecolor (WHITE);
fillrectangle (240, 140, 400, 260);
setfillcolor (LIGHTMAGENTA);
solidrectangle (440, 140, 600, 260);
//
// 圆。
//
setlinecolor (WHITE);
circle (110, 360, 60);
setfillcolor (RGB (220, 160, 40));
setlinecolor (WHITE);
fillcircle (320, 360, 60);
setfillcolor (LIGHTGREEN);
solidcircle (520, 360, 60);
//
// 椭圆。
//
setlinecolor (LIGHTCYAN);
ellipse (40, 440, 260, 540);
setfillcolor (RGB (200, 60, 120));
setlinecolor (WHITE);
fillellipse (300, 440, 560, 540);
//
// 一次性刷新并结束批量绘图。
//
EndBatchDraw ();
//
// 等待按键后清理退出。
//
WaitAnyKey ();
closegraph ();
//
// 恢复文本控制台。
//
gST->ConOut->ClearScreen (gST->ConOut);
Print (L"EasyX UEFI Demo 结束。分辨率: %d x %d\n", W, H);
return EFI_SUCCESS;
}
在EDK2 自带的模拟器中测试结果如下,可以说完全达到了预期:
完整代码和编译后的 EFI 可以在这里下载:
Ch32V307 I2C 扫描程序
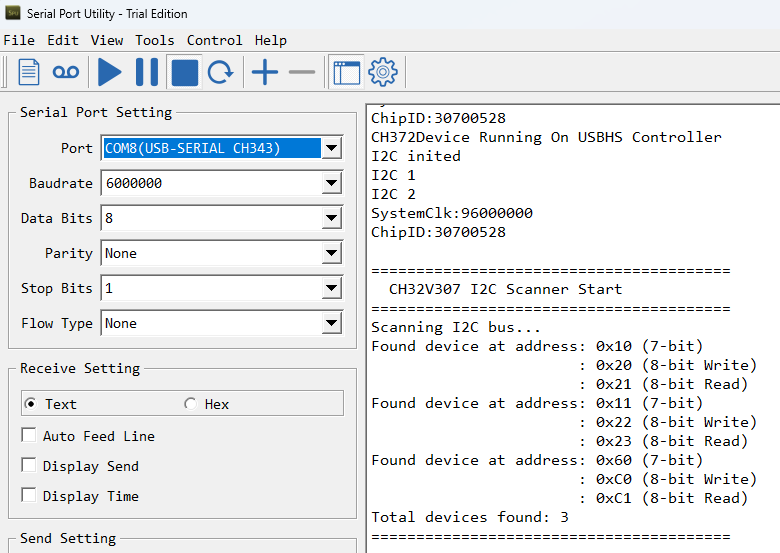
Ch32V307 使用 I2C2 进行扫描的代码,使用 I2C2 ,对应引脚 PB10 为 SCL , PB11 为 SDA。串口输出波特率 6000 000bps。
#include “ch32v30x.h”
#include “debug.h”
/* I2C 引脚定义 (可根据实际硬件修改) */
#define I2C_SCL_PIN GPIO_Pin_10
#define I2C_SDA_PIN GPIO_Pin_11
#define I2C_PORT GPIOB
#define I2C_CLK RCC_APB2Periph_GPIOB
/* I2C 实例定义 */
#define I2C_INSTANCE I2C2
#define I2C_CLK_SRC RCC_APB1Periph_I2C2
/* I2C GPIO 初始化 */
void I2C_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(I2C_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = I2C_SCL_PIN | I2C_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; // 开漏复用输出
GPIO_Init(I2C_PORT, &GPIO_InitStructure);
}
/* I2C 模块初始化 */
void I2C_Master_Init(void)
{
I2C_InitTypeDef I2C_InitStructure;
RCC_APB1PeriphClockCmd(I2C_CLK_SRC, ENABLE);
I2C_DeInit(I2C_INSTANCE);
I2C_InitStructure.I2C_ClockSpeed = 100000; // 100kHz 标准模式
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_OwnAddress1 = 0x00; // 主机模式不需要自身地址
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init(I2C_INSTANCE, &I2C_InitStructure);
I2C_Cmd(I2C_INSTANCE, ENABLE);
}
/* 检测单个 I2C 地址是否存在设备 */
// 返回 0: 设备存在 (ACK), 1: 无设备 (NACK) 或错误
uint8_t I2C_Check_Device(uint8_t address)
{
I2C_GenerateSTART(I2C_INSTANCE, ENABLE);
// 等待起始条件发送完成
while(!I2C_CheckEvent(I2C_INSTANCE, I2C_EVENT_MASTER_MODE_SELECT));
// 发送地址 (写方向, 最后一位为0)
I2C_Send7bitAddress(I2C_INSTANCE, address << 1, I2C_Direction_Transmitter);
// 等待地址发送完成或接收到 NACK
// 注意:CH32V307 库函数可能需要根据具体状态标志判断
// 这里使用简单的超时机制和状态检查
uint32_t timeout = 10000;
while(timeout–)
{
if(I2C_GetFlagStatus(I2C_INSTANCE, I2C_FLAG_ADDR))
{
// 地址发送成功,收到 ACK
I2C_ClearFlag(I2C_INSTANCE, I2C_FLAG_ADDR);
I2C_GenerateSTOP(I2C_INSTANCE, ENABLE);
return 0; // 设备存在
}
if(I2C_GetFlagStatus(I2C_INSTANCE, I2C_FLAG_AF))
{
// 收到 NACK
I2C_ClearFlag(I2C_INSTANCE, I2C_FLAG_AF);
I2C_GenerateSTOP(I2C_INSTANCE, ENABLE);
return 1; // 无设备
}
}
// 超时错误
I2C_GenerateSTOP(I2C_INSTANCE, ENABLE);
return 1;
}
/* 扫描总线上的所有设备 */
void I2C_Scan_Bus(void)
{
uint8_t address;
uint8_t found_count = 0;
printf(“\r\n========================================\r\n”);
printf(” CH32V307 I2C Scanner Start\r\n”);
printf(“========================================\r\n”);
printf(“Scanning I2C bus…\r\n”);
for(address = 1; address < 127; address++)
{
// 跳过保留地址 (通常 0x00 是通用呼叫,0x78-0x7F 是保留)
// 但为了全面扫描,我们扫描 1-127,具体保留地址视情况而定
if(I2C_Check_Device(address) == 0)
{
printf(“Found device at address: 0x%02X (7-bit)\r\n”, address);
printf(” : 0x%02X (8-bit Write)\r\n”, address << 1);
printf(” : 0x%02X (8-bit Read)\r\n”, (address << 1) | 1);
found_count++;
}
// 短暂延时,避免总线过于繁忙
Delay_Ms(5);
}
if(found_count == 0)
{
printf(“No I2C devices found.\r\n”);
}
else
{
printf(“Total devices found: %d\r\n”, found_count);
}
printf(“========================================\r\n\r\n”);
}
/*********************************************************************
* @fn main
*
* @brief Main program.
*
* @return none
*/
int main(void) {
SystemCoreClockUpdate();
Delay_Init();
USART_Printf_Init(6000000);
printf(“SystemClk:%d\r\n”, SystemCoreClock);
printf(“ChipID:%08x\r\n”, DBGMCU_GetCHIPID());
I2C_GPIO_Init();
I2C_Master_Init();
while(1)
{
I2C_Scan_Bus();
Delay_Ms(5000); // 每5秒扫描一次
}
}
运行结果:
UEFI EDK2 INF 文件编码问题
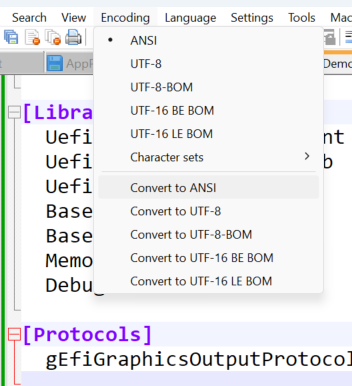
最近偶然发现,如果EDK2 INF使用 Unicode 编码,可能会导致“: error 0004: File read failure”错误。
例如:
Build environment: Windows-10-10.0.26100-SP0
Build start time: 10:58:15, Jul.16 2026
WORKSPACE = c:\buildbs\edk2202302\edk2
EDK_TOOLS_PATH = c:\buildbs\edk2202302\edk2\basetools
EDK_TOOLS_BIN = c:\buildbs\edk2202302\edk2\basetools\bin\win32
CONF_PATH = c:\buildbs\edk2202302\edk2\conf
PYTHON_COMMAND = py -3
Processing meta-data .Architecture(s) = X64
Build target = DEBUG
Toolchain = VS2019
Active Platform = c:\buildbs\edk2202302\edk2\AppPkg\AppPkg.dsc
build.py…
: error 0004: File read failure
解决方法上来说,可以使用 Notepad++ 或者类似工具,更改一下编码,然后保存即可:
USB 3.0 U盘速度慢的一种可能
如果你的3.0U盘支持的是 BOT mode,那么很可能传输速度较慢。
判断的方法是查看描述符中的 Interface Protocol,如果是50h,那么就是。比如,下面来自我手上的一个U盘:
[Port13] : USB Mass Storage Device
Is Port User Connectable: yes
Is Port Debug Capable: yes
Companion Port Number: 3
Companion Hub Symbolic Link Name: USB#ROOT_HUB30#4&16cc2fc5&0&0#{f18a0e88-c30c-11d0-8815-00a0c906bed8}
Protocols Supported:
USB 1.1: no
USB 2.0: no
USB 3.0: yes
Device Power State: PowerDeviceD0
---===>Device Information<===---
English product name: "Disk 20"
ConnectionStatus:
Current Config Value: 0x01 -> Device Bus Speed: SuperSpeed
Device Address: 0x17
Open Pipes: 2
===>Device Descriptor<===
bLength: 0x12
bDescriptorType: 0x01
bcdUSB: 0x0320
bDeviceClass: 0x00 -> This is an Interface Class Defined Device
bDeviceSubClass: 0x00
bDeviceProtocol: 0x00
bMaxPacketSize0: 0x09 = (9) Bytes
idVendor: 0x346D = Vendor ID not listed with USB.org
idProduct: 0x5678
bcdDevice: 0x0200
iManufacturer: 0x01
English (United States) "USB"
iProduct: 0x02
English (United States) "Disk 20"
iSerialNumber: 0x03
English (United States) "FC097CCF38A2A"
bNumConfigurations: 0x01
---===>Open Pipes<===---
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x01 -> Direction: OUT - EndpointID: 1
bmAttributes: 0x02 -> Bulk Transfer Type
wMaxPacketSize: 0x0400
bInterval: 0x00
===>Endpoint Descriptor<===
bLength: 0x07
bDescriptorType: 0x05
bEndpointAddress: 0x81 -> Direction: IN - EndpointID: 1
bmAttributes: 0x02 -> Bulk Transfer Type
wMaxPacketSize: 0x0400
bInterval: 0x00
---===>Full Configuration Descriptor<===---
===>Configuration Descriptor<===
bLength: 0x09
bDescriptorType: 0x02
wTotalLength: 0x002C -> Validated
bNumInterfaces: 0x01
bConfigurationValue: 0x01
iConfiguration: 0x00
bmAttributes: 0x80 -> Bus Powered
MaxPower: 0x12 = 144 mA
===>Interface Descriptor<===
bLength: 0x09
bDescriptorType: 0x04
bInterfaceNumber: 0x00
bAlternateSetting: 0x00
bNumEndpoints: 0x02
bInterfaceClass: 0x08 -> This is a Mass Storage USB Device Interface Class
bInterfaceSubClass: 0x06
bInterfaceProtocol: 0x50
iInterface: 0x00
如果使用抓包工具,会看到下面这种模式的传输
31B OUT
大块 IN
13B IN
与之相反,还有一种UASP,对应的Interface Protocol 是 62h,速度更快。
WAVE 音频文件查看器
吹蟑螂游戏机
这是一个使用表压传感器NSPGD1M006DT04设计一个双人对战的“吹蟑螂游戏机”。
在神秘的南亚次大陆,存在着一个神奇的国度,那里的人们经过几千年的洗礼,能够做到和各种小动物和平共存。在当地有着一个古老的游戏:吹蟑螂比赛。双方选手将一直蟑螂放置在玻璃管中,然后同时吹气,能够将蟑螂吹到另外一方的选手就获得了胜利。
很多人第一次听到这种游戏的时候,都会由衷感叹:印吹死挺!
项目描述
项目使用 WS2812 LED 作为指示灯,它是一款集控制电路与发光电路于一体的智能外控LED光源,其外型与5050LED灯珠相同,每个元件即为一个像素点。它采用单线归零码通信方式,通过一根信号线即可实现数据的接收与解码,支持级联控制,理论上可无限扩展。
游戏方法非常简单:
1. 双方比赛开始后,对着自己面前带有传感器的盒子吹气
2. 中间有24个LED,其中2个LED会亮起红色,当一方吹气后,LED会向着对方方向移动
3. 红色LED触及一方最后一个 LED后游戏结束
4. 按下按钮会重新开始新的对战
芯片选型/简短的硬件介绍
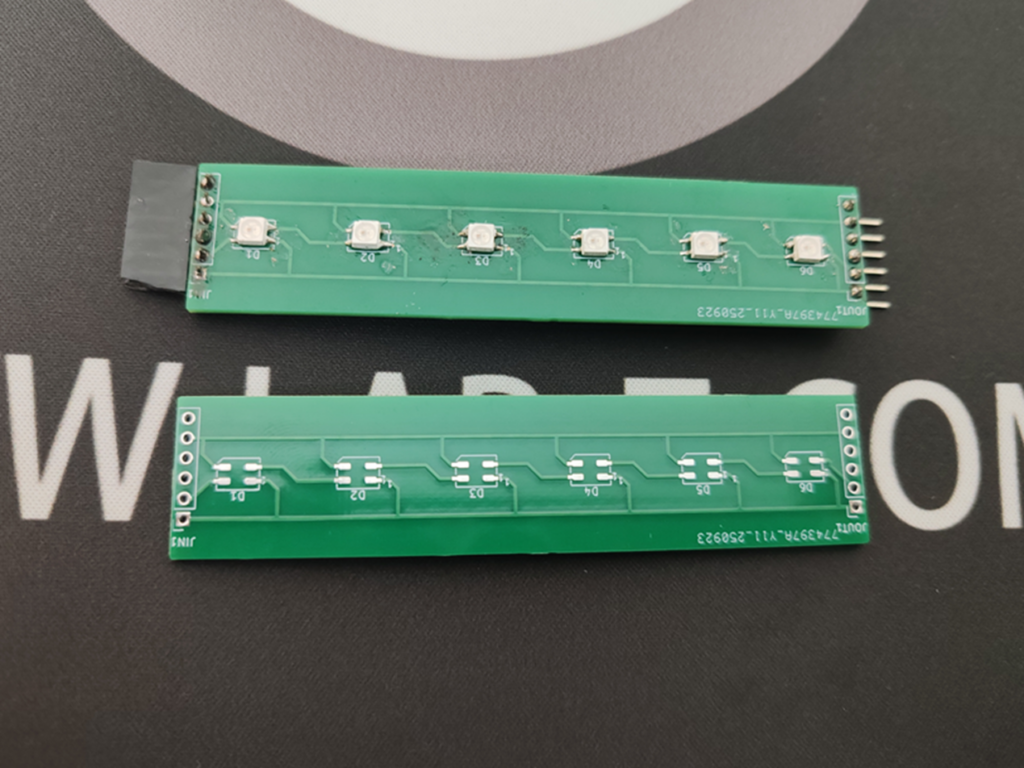
项目实际上有三块 PCB
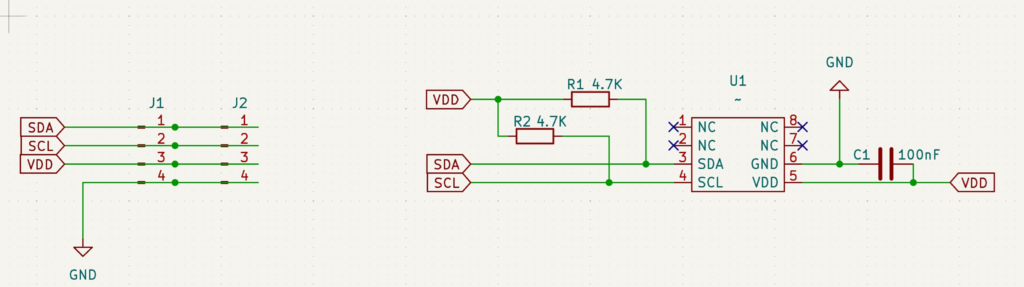
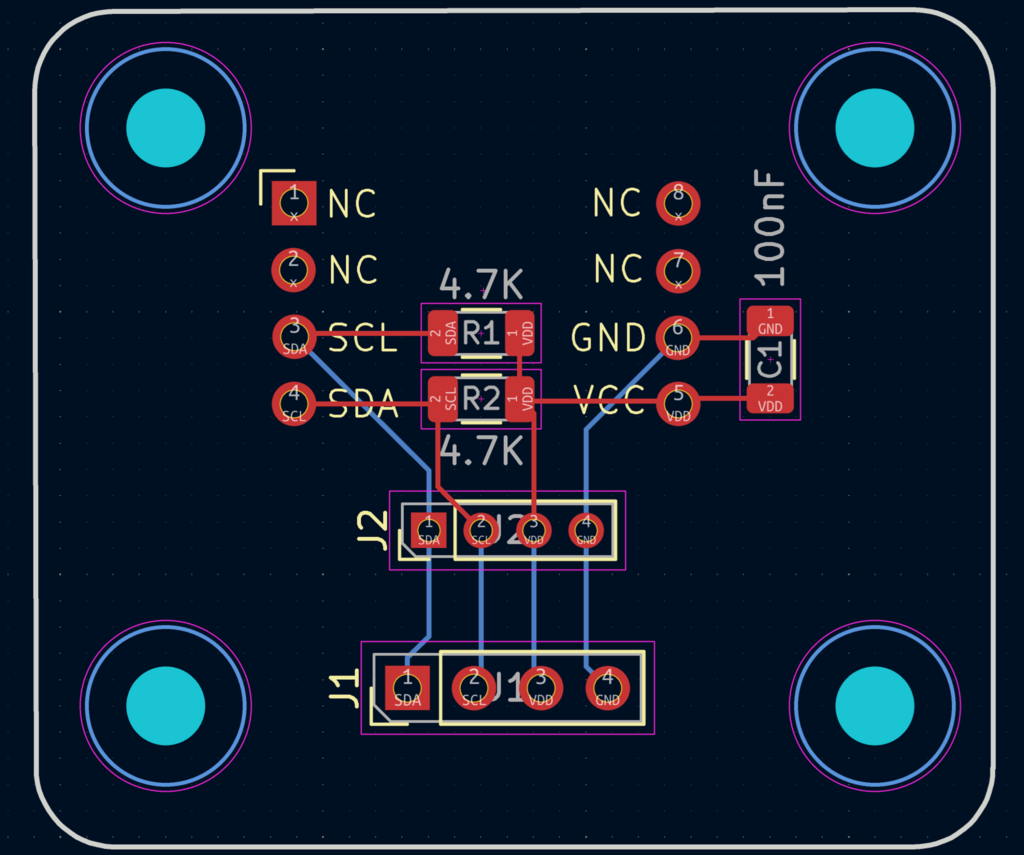
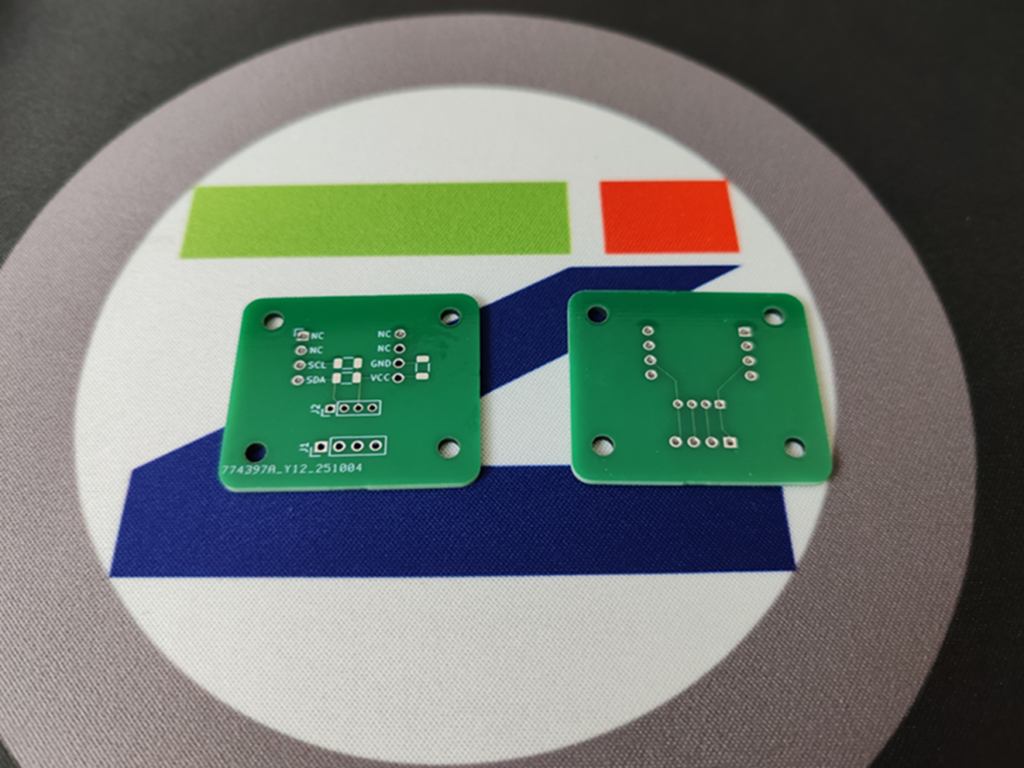
1. NSPGD1M006DT04 的转接板,方便我们实现这个传感器和 Arduino 的连接。NSPGD1M006DT04是表压传感器。表压传感器(Gauge Pressure Sensor)是一种测量相对压力的传感器,即相对于大气压力的压力值。相对的还有绝压传感器(Absolute Pressure Sensor)是一种测量相对于真空或绝对零点的压力的传感器。
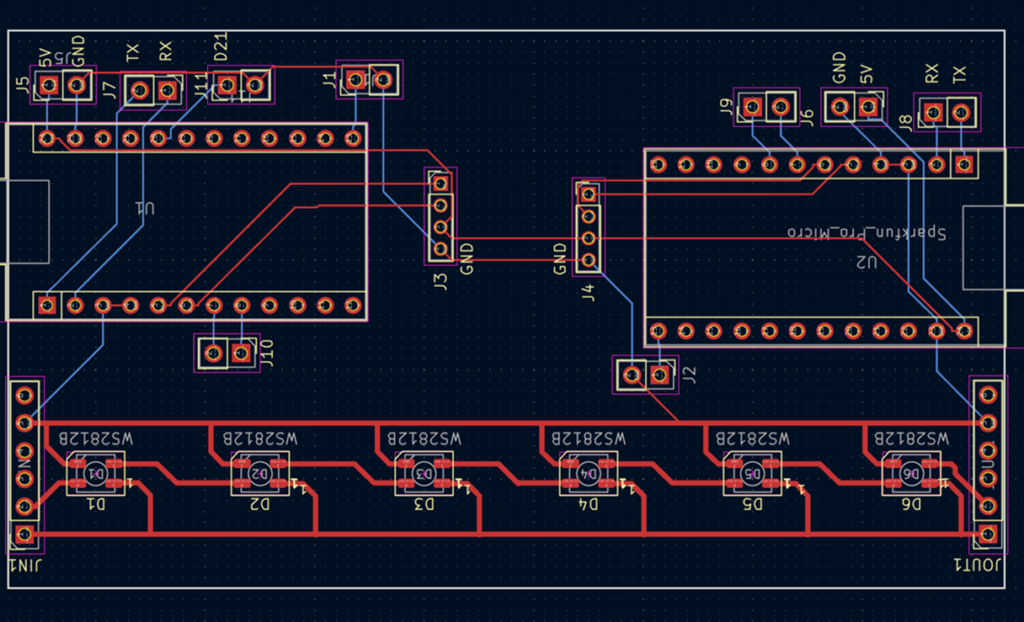
2. 带有 Arduino 的控制板,位于游戏机的最左侧和最右侧,理论上需要设计一个左侧和右侧板,但是这里为了成本考量,将二者放在同一块板子上,根据需要焊接左侧或者右侧;
3. WS2812 灯板,这个位于中间
出于成本考虑,板子长度都是小于10cm的,中间使用 U形状的 2.54mm排针进行连接
方案框图 + 设计思路

原理图、PCB设计
1.NSPGD1M006DT04 的转接板电路板和PCB
2.控制板电路和PCB设计,控制板上也带有 WS2812 LED,这样可以最大化利用空间
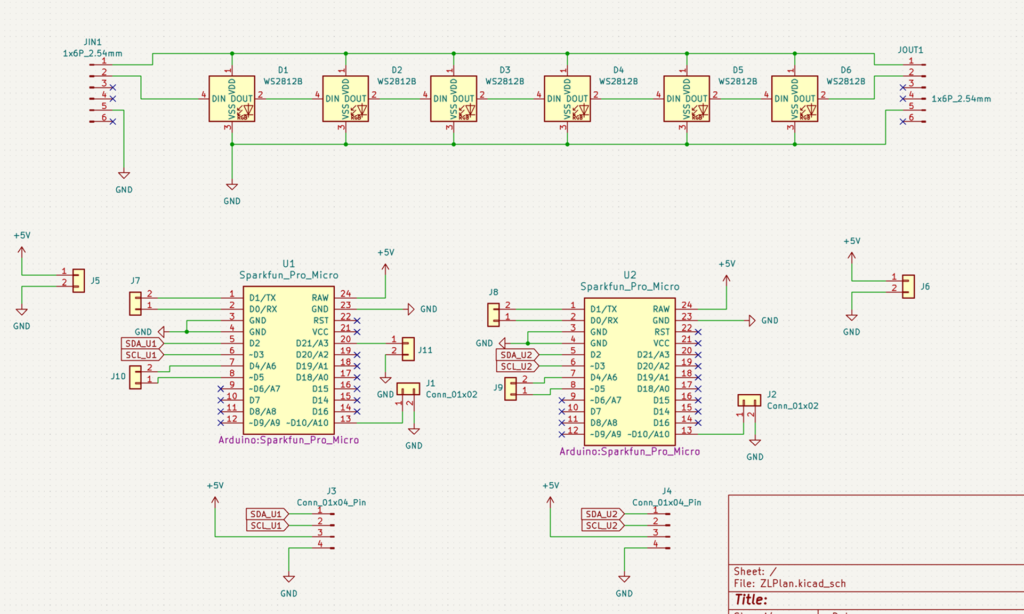
具体使用的时候,需要额外导线将右侧Arduino 的 TX 连接左侧的 RX
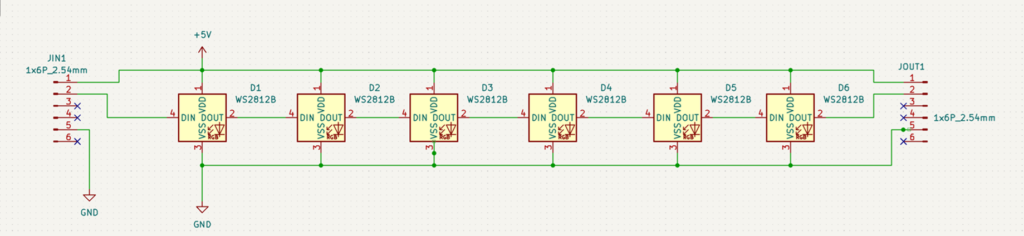
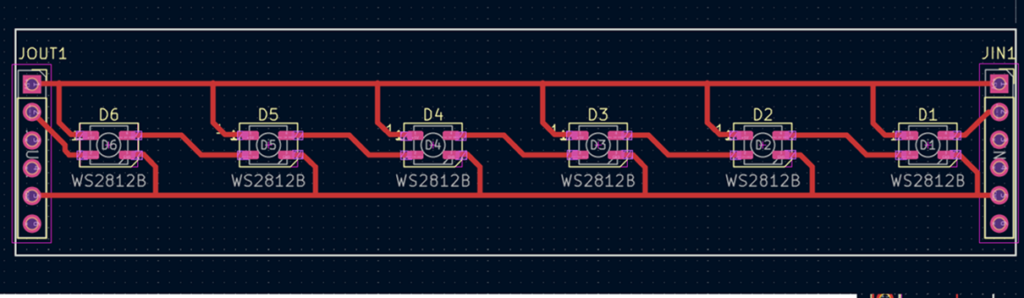
3.WS2812 电路板和 PCB,输入VCC ,控制信号(DIN)和 GND 即可,多余的引脚主要是为了保证连接的稳固
软件流程图 + 调试软件说明 + 关键代码说明
代码分为2部分:左侧和右侧 Arduino 代码不同(具体左右区分方法在下图中)。右侧的只负责读取传感器数据,然后通过串口传输给左侧。然后左侧同样获得传感器数据,比较之后对 WS2812 发送控制信号,操作LED
右侧代码:
#include <Wire.h>
#include "NSPGD1M006DT04.h"
NSPGD1M006DT04 sensor(0xFF);
void setup() {
Serial.begin(115200);
Serial1.begin(2400);
if (!sensor.begin()) {
Serial.println("Device not found");
while(1);
}
}
void loop() {
char s[20];
float pr=sensor.readPressure();
//float pr=3.14159269;
uint8_t *p;
dtostrf(pr,1,6,s);
Serial.println(s);
p=(uint8_t*)≺
Serial1.write(0x55);
Serial1.write(0xAA);
Serial1.write(*p);
Serial1.write(*(p+1));
Serial1.write(*(p+2));
Serial1.write(*(p+3));
delay(50);
}
左侧代码:
#include <FastLED.h>
#include "NSPGD1M006DT04.h"
// 灯带
#define LED_PIN 5
#define COLOR_ORDER GRB
#define CHIPSET WS2812B
#define NUM_LEDS 24
#define BLOWTIME 300
#define RSTARTPIN 10
NSPGD1M006DT04 sensor(0xFF);
CRGB leds[NUM_LEDS];
void(* resetFunc) (void) = 0;
void setup() {
//Serial.begin(115200);
Serial1.begin(2400);
if (!sensor.begin()) {
Serial.println("Device not found");
while (1);
}
pinMode(RSTARTPIN, INPUT_PULLUP);
FastLED.addLeds<CHIPSET, LED_PIN, COLOR_ORDER>(leds, NUM_LEDS).setCorrection( TypicalLEDStrip );
FastLED.setBrightness( 1 );
for (uint8_t i = 0; i < NUM_LEDS / 2; i++) {
memset(leds, 0, sizeof(leds));
leds[NUM_LEDS / 2 - i] = CRGB::Red;
leds[NUM_LEDS / 2 + i] = CRGB::Red;
FastLED.show(); // display this frame
FastLED.delay(300);
}
memset(leds, 0, sizeof(leds));
leds[NUM_LEDS / 2 ] = CRGB::Red;
leds[NUM_LEDS / 2 + 1] = CRGB::Red;
FastLED.show(); // display this frame
FastLED.delay(300);
}
long int Elsp = 0;
uint8_t CockroachPosition = NUM_LEDS / 2;
float LeftSum = 0, RightSum = 0;
uint8_t Index = 0;
void loop() {
float prRight;
uint8_t *p;
while (Serial1.available()) {
uint8_t c = Serial1.read();
if ((Index == 0) && (c == 0x55)) {
Index++;
p = (uint8_t*)&prRight;
} else if ((Index == 1) && (c == 0xAA)) {
Index++;
} else if (Index != 0) {
*p = c;
p++;
Index++;
if (Index == 6) {
RightSum = RightSum + prRight;
float Left = sensor.readPressure();
Index = 0;
if ((prRight < 0) || (Left < 0)) {
break;
}
LeftSum = LeftSum + Left;
// Serial.print("Rcv"); Serial.print(" "); Serial.print(Left); Serial.print(" "); Serial.println(prRight);
}
}
}
if ((millis() - Elsp > BLOWTIME) && (Index == 0)) {
if (LeftSum > RightSum + 0.1) {
CockroachPosition++;
}
if (LeftSum + 0.1 < RightSum) {
CockroachPosition--;
}
memset(leds, 0, sizeof(leds));
leds[CockroachPosition] = CRGB::Red;
leds[CockroachPosition + 1] = CRGB::Red;
FastLED.show(); // display this frame
// Serial.print("Set LED"); Serial.print(CockroachPosition); Serial.print(" ");
// Serial.print(LeftSum); Serial.print(" "); Serial.print(RightSum); Serial.print(" "); Serial.println(Index);
LeftSum = 0; RightSum = 0;
if ((CockroachPosition == 0) || (CockroachPosition == NUM_LEDS - 2)) {
Serial.println("Win");
while (1) {
if (digitalRead(RSTARTPIN) == LOW) {
resetFunc();
}
}
}
Elsp = millis();
}
}
实物演示以及说明
前面提到了,这次设计了三块PCB,实物如下
1.NSPGD1M006DT04 的转接板实物
2.控制板电路板实物

3.WS2812 电路板和
上述PCB 焊接之后通过U型排针连接在一起,按照下图放置
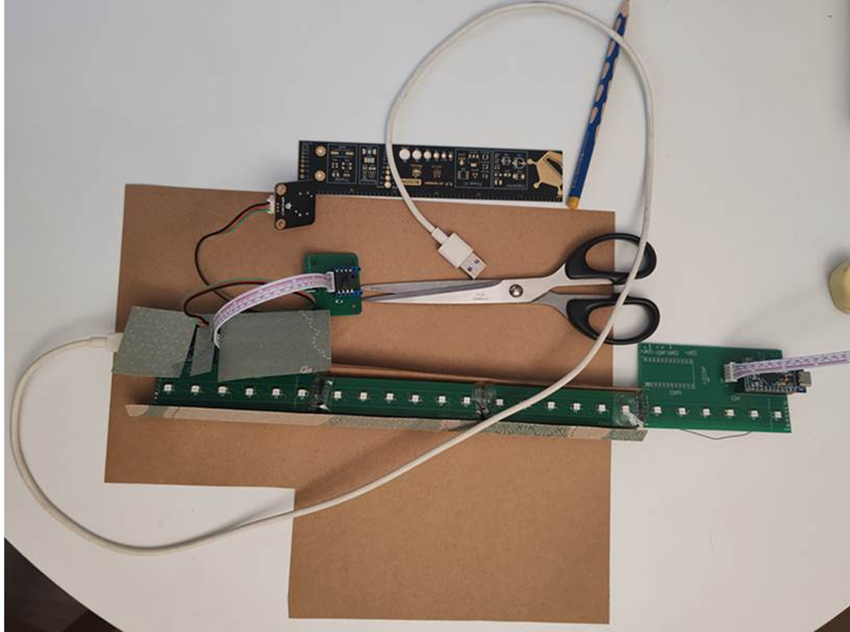
游戏的时候双方对着传感器吹气即可:

遇到的难点及解决方法
1. NSPGD1M006DT04传感器无法设定设备地址,因此 I2C 上只能放置一个。如果有需要,那么可以通过 GPIO 来进行模拟,或者通过添加元件来解决。最终选择的方案是使用2个Arduino 这样可以化简电路,方便代码编写;
2. 两个 Arduino 使用串口通讯,Arduino Leonardo 中 float 占用4字节。为了简单起见,采用直接将float 拆开然后加上识别头的方法来进行传输
工作的视频
本文提到的 PCB 和代码下载:
====================================================
本文是2025年参加电子森林活动的项目,获得优秀奖
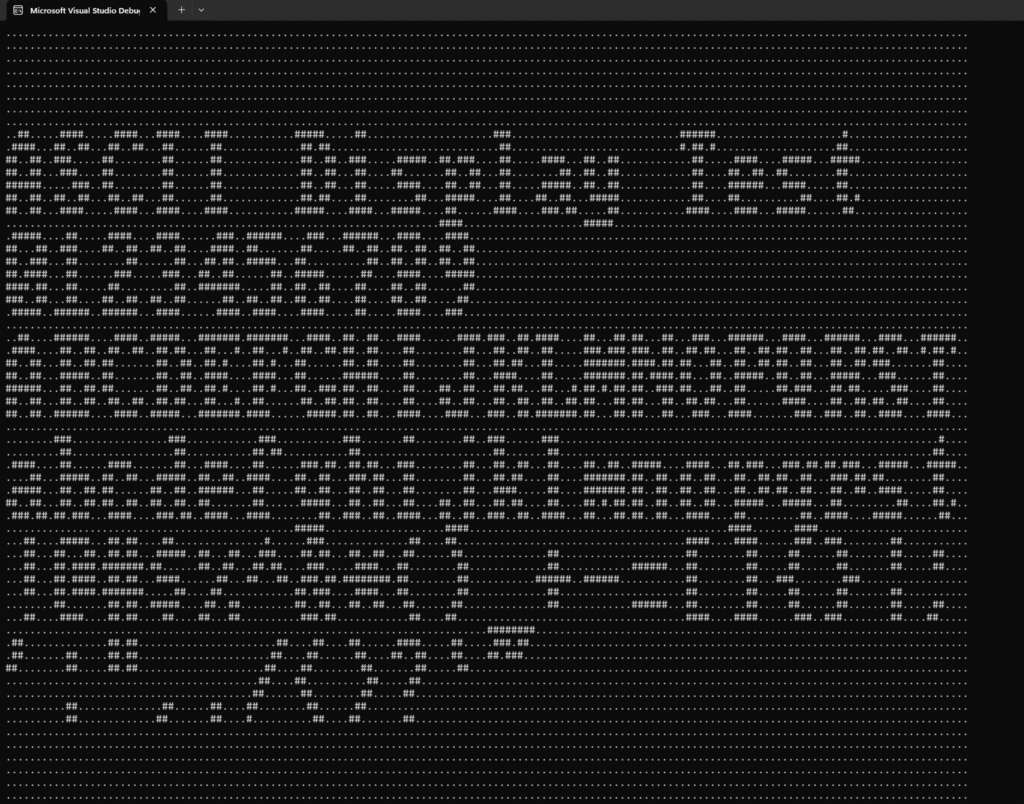
在Buffer 中显示 Ascii
编写了一个代码,在一个 160*120 Buffer 中显示 Ascii。
这个代码可以看作实现了一个简单的字库。
VS2019 代码如下:
#include <stdio.h>
#include <string.h>
#include <stdint.h>
#include <windows.h>
// 显示缓冲区尺寸
#define BUFFER_WIDTH 160
#define BUFFER_HEIGHT 120
// 字符尺寸 (8x8像素)
#define CHAR_WIDTH 8
#define CHAR_HEIGHT 8
// 计算可显示的字符数量
#define CHARS_PER_ROW (BUFFER_WIDTH / CHAR_WIDTH) // 20个字符
#define CHARS_PER_COL (BUFFER_HEIGHT / CHAR_HEIGHT) // 15行
// 显示缓冲区
uint8_t display_buffer[BUFFER_HEIGHT][BUFFER_WIDTH];
// 修正后的ASCII字符字体数据 (8x8像素,可见字符32-126)
const uint8_t ascii_font[95][8] = {
// 空格 (32)
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00},
// ! (33)
{0x18, 0x18, 0x18, 0x18, 0x18, 0x00, 0x18, 0x00},
// " (34)
{0x6C, 0x6C, 0x6C, 0x00, 0x00, 0x00, 0x00, 0x00},
// # (35)
{0x6C, 0x6C, 0xFE, 0x6C, 0xFE, 0x6C, 0x6C, 0x00},
// $ (36)
{0x30, 0x7C, 0xC0, 0x78, 0x0C, 0xF8, 0x30, 0x00},
// % (37)
{0x00, 0xC6, 0xCC, 0x18, 0x30, 0x66, 0xC6, 0x00},
// & (38)
{0x38, 0x6C, 0x38, 0x76, 0xDC, 0xCC, 0x76, 0x00},
// ' (39)
{0x60, 0x60, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00},
// ( (40)
{0x18, 0x30, 0x60, 0x60, 0x60, 0x30, 0x18, 0x00},
// ) (41)
{0x60, 0x30, 0x18, 0x18, 0x18, 0x30, 0x60, 0x00},
// * (42)
{0x00, 0x66, 0x3C, 0xFF, 0x3C, 0x66, 0x00, 0x00},
// + (43)
{0x00, 0x30, 0x30, 0xFC, 0x30, 0x30, 0x00, 0x00},
// , (44)
{0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x60, 0x00},
// - (45)
{0x00, 0x00, 0x00, 0xFC, 0x00, 0x00, 0x00, 0x00},
// . (46)
{0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x30, 0x00},
// / (47)
{0x06, 0x0C, 0x18, 0x30, 0x60, 0xC0, 0x80, 0x00},
// 0 (48)
{0x7C, 0xC6, 0xCE, 0xDE, 0xF6, 0xE6, 0x7C, 0x00},
// 1 (49)
{0x30, 0x70, 0x30, 0x30, 0x30, 0x30, 0xFC, 0x00},
// 2 (50)
{0x78, 0xCC, 0x0C, 0x38, 0x60, 0xCC, 0xFC, 0x00},
// 3 (51)
{0x78, 0xCC, 0x0C, 0x38, 0x0C, 0xCC, 0x78, 0x00},
// 4 (52)
{0x1C, 0x3C, 0x6C, 0xCC, 0xFE, 0x0C, 0x1E, 0x00},
// 5 (53)
{0xFC, 0xC0, 0xF8, 0x0C, 0x0C, 0xCC, 0x78, 0x00},
// 6 (54)
{0x38, 0x60, 0xC0, 0xF8, 0xCC, 0xCC, 0x78, 0x00},
// 7 (55)
{0xFC, 0xCC, 0x0C, 0x18, 0x30, 0x30, 0x30, 0x00},
// 8 (56)
{0x78, 0xCC, 0xCC, 0x78, 0xCC, 0xCC, 0x78, 0x00},
// 9 (57)
{0x78, 0xCC, 0xCC, 0x7C, 0x0C, 0x18, 0x70, 0x00},
// : (58)
{0x00, 0x30, 0x30, 0x00, 0x00, 0x30, 0x30, 0x00},
// ; (59)
{0x00, 0x30, 0x30, 0x00, 0x00, 0x30, 0x60, 0x00},
// < (60)
{0x18, 0x30, 0x60, 0xC0, 0x60, 0x30, 0x18, 0x00},
// = (61)
{0x00, 0x00, 0xFC, 0x00, 0x00, 0xFC, 0x00, 0x00},
// > (62)
{0x60, 0x30, 0x18, 0x0C, 0x18, 0x30, 0x60, 0x00},
// ? (63)
{0x78, 0xCC, 0x0C, 0x18, 0x30, 0x00, 0x30, 0x00},
// @ (64)
{0x7C, 0xC6, 0xDE, 0xDE, 0xDE, 0xC0, 0x78, 0x00},
// A (65)
{0x30, 0x78, 0xCC, 0xCC, 0xFC, 0xCC, 0xCC, 0x00},
// B (66)
{0xFC, 0x66, 0x66, 0x7C, 0x66, 0x66, 0xFC, 0x00},
// C (67)
{0x3C, 0x66, 0xC0, 0xC0, 0xC0, 0x66, 0x3C, 0x00},
// D (68)
{0xF8, 0x6C, 0x66, 0x66, 0x66, 0x6C, 0xF8, 0x00},
// E (69)
{0xFE, 0x62, 0x68, 0x78, 0x68, 0x62, 0xFE, 0x00},
// F (70)
{0xFE, 0x62, 0x68, 0x78, 0x68, 0x60, 0xF0, 0x00},
// G (71)
{0x3C, 0x66, 0xC0, 0xC0, 0xCE, 0x66, 0x3E, 0x00},
// H (72)
{0xCC, 0xCC, 0xCC, 0xFC, 0xCC, 0xCC, 0xCC, 0x00},
// I (73)
{0x78, 0x30, 0x30, 0x30, 0x30, 0x30, 0x78, 0x00},
// J (74)
{0x1E, 0x0C, 0x0C, 0x0C, 0xCC, 0xCC, 0x78, 0x00},
// K (75)
{0xE6, 0x66, 0x6C, 0x78, 0x6C, 0x66, 0xE6, 0x00},
// L (76)
{0xF0, 0x60, 0x60, 0x60, 0x62, 0x66, 0xFE, 0x00},
// M (77)
{0xC6, 0xEE, 0xFE, 0xFE, 0xD6, 0xC6, 0xC6, 0x00},
// N (78)
{0xC6, 0xE6, 0xF6, 0xDE, 0xCE, 0xC6, 0xC6, 0x00},
// O (79)
{0x38, 0x6C, 0xC6, 0xC6, 0xC6, 0x6C, 0x38, 0x00},
// P (80)
{0xFC, 0x66, 0x66, 0x7C, 0x60, 0x60, 0xF0, 0x00},
// Q (81)
{0x78, 0xCC, 0xCC, 0xCC, 0xDC, 0x78, 0x1C, 0x00},
// R (82)
{0xFC, 0x66, 0x66, 0x7C, 0x6C, 0x66, 0xE6, 0x00},
// S (83)
{0x78, 0xCC, 0xE0, 0x70, 0x1C, 0xCC, 0x78, 0x00},
// T (84)
{0xFC, 0xB4, 0x30, 0x30, 0x30, 0x30, 0x78, 0x00},
// U (85)
{0xCC, 0xCC, 0xCC, 0xCC, 0xCC, 0xCC, 0xFC, 0x00},
// V (86)
{0xCC, 0xCC, 0xCC, 0xCC, 0xCC, 0x78, 0x30, 0x00},
// W (87)
{0xC6, 0xC6, 0xC6, 0xD6, 0xFE, 0xEE, 0xC6, 0x00},
// X (88)
{0xC6, 0xC6, 0x6C, 0x38, 0x38, 0x6C, 0xC6, 0x00},
// Y (89)
{0xCC, 0xCC, 0xCC, 0x78, 0x30, 0x30, 0x78, 0x00},
// Z (90)
{0xFE, 0xC6, 0x8C, 0x18, 0x32, 0x66, 0xFE, 0x00},
// [ (91)
{0x78, 0x60, 0x60, 0x60, 0x60, 0x60, 0x78, 0x00},
// \ (92)
{0xC0, 0x60, 0x30, 0x18, 0x0C, 0x06, 0x02, 0x00},
// ] (93)
{0x78, 0x18, 0x18, 0x18, 0x18, 0x18, 0x78, 0x00},
// ^ (94)
{0x10, 0x38, 0x6C, 0xC6, 0x00, 0x00, 0x00, 0x00},
// _ (95)
{0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF},
// ` (96)
{0x30, 0x30, 0x18, 0x00, 0x00, 0x00, 0x00, 0x00},
// a (97)
{0x00, 0x00, 0x78, 0x0C, 0x7C, 0xCC, 0x76, 0x00},
// b (98)
{0xE0, 0x60, 0x60, 0x7C, 0x66, 0x66, 0xDC, 0x00},
// c (99)
{0x00, 0x00, 0x78, 0xCC, 0xC0, 0xCC, 0x78, 0x00},
// d (100)
{0x1C, 0x0C, 0x0C, 0x7C, 0xCC, 0xCC, 0x76, 0x00},
// e (101)
{0x00, 0x00, 0x78, 0xCC, 0xFC, 0xC0, 0x78, 0x00},
// f (102)
{0x38, 0x6C, 0x60, 0xF0, 0x60, 0x60, 0xF0, 0x00},
// g (103)
{0x00, 0x00, 0x76, 0xCC, 0xCC, 0x7C, 0x0C, 0xF8},
// h (104)
{0xE0, 0x60, 0x6C, 0x76, 0x66, 0x66, 0xE6, 0x00},
// i (105)
{0x30, 0x00, 0x70, 0x30, 0x30, 0x30, 0x78, 0x00},
// j (106)
{0x0C, 0x00, 0x0C, 0x0C, 0x0C, 0xCC, 0xCC, 0x78},
// k (107)
{0xE0, 0x60, 0x66, 0x6C, 0x78, 0x6C, 0xE6, 0x00},
// l (108)
{0x70, 0x30, 0x30, 0x30, 0x30, 0x30, 0x78, 0x00},
// m (109)
{0x00, 0x00, 0xCC, 0xFE, 0xFE, 0xD6, 0xC6, 0x00},
// n (110)
{0x00, 0x00, 0xF8, 0xCC, 0xCC, 0xCC, 0xCC, 0x00},
// o (111)
{0x00, 0x00, 0x78, 0xCC, 0xCC, 0xCC, 0x78, 0x00},
// p (112)
{0x00, 0x00, 0xDC, 0x66, 0x66, 0x7C, 0x60, 0xF0},
// q (113)
{0x00, 0x00, 0x76, 0xCC, 0xCC, 0x7C, 0x0C, 0x1E},
// r (114)
{0x00, 0x00, 0xDC, 0x76, 0x66, 0x60, 0xF0, 0x00},
// s (115)
{0x00, 0x00, 0x7C, 0xC0, 0x78, 0x0C, 0xF8, 0x00},
// t (116)
{0x10, 0x30, 0x7C, 0x30, 0x30, 0x34, 0x18, 0x00},
// u (117)
{0x00, 0x00, 0xCC, 0xCC, 0xCC, 0xCC, 0x76, 0x00},
// v (118)
{0x00, 0x00, 0xCC, 0xCC, 0xCC, 0x78, 0x30, 0x00},
// w (119)
{0x00, 0x00, 0xC6, 0xD6, 0xFE, 0xFE, 0x6C, 0x00},
// x (120)
{0x00, 0x00, 0xC6, 0x6C, 0x38, 0x6C, 0xC6, 0x00},
// y (121)
{0x00, 0x00, 0xCC, 0xCC, 0xCC, 0x7C, 0x0C, 0xF8},
// z (122)
{0x00, 0x00, 0xFC, 0x98, 0x30, 0x64, 0xFC, 0x00},
// { (123)
{0x1C, 0x30, 0x30, 0xE0, 0x30, 0x30, 0x1C, 0x00},
// | (124)
{0x18, 0x18, 0x18, 0x00, 0x18, 0x18, 0x18, 0x00},
// } (125)
{0xE0, 0x30, 0x30, 0x1C, 0x30, 0x30, 0xE0, 0x00},
// ~ (126)
{0x76, 0xDC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00}
};
// 清空显示缓冲区
void clear_buffer() {
memset(display_buffer, 0, sizeof(display_buffer));
}
// 在指定位置绘制单个字符
void draw_char(int x, int y, char c) {
if (c < 32 || c > 126) return; // 只支持可见ASCII字符
int char_index = c - 32;
const uint8_t* font_data = ascii_font[char_index];
for (int row = 0; row < CHAR_HEIGHT; row++) {
if (y + row >= BUFFER_HEIGHT) break;
uint8_t font_row = font_data[row];
for (int col = 0; col < CHAR_WIDTH; col++) {
if (x + col >= BUFFER_WIDTH) break;
if (font_row & (0x80 >> col)) {
display_buffer[y + row][x + col] = 1;
}
}
}
}
// 在指定字符位置绘制字符(自动计算像素位置)
void draw_char_at_pos(int char_x, int char_y, char c) {
if (char_x >= CHARS_PER_ROW || char_y >= CHARS_PER_COL) return;
int pixel_x = char_x * CHAR_WIDTH;
int pixel_y = char_y * CHAR_HEIGHT;
draw_char(pixel_x, pixel_y, c);
}
// 绘制字符串
void draw_string(int char_x, int char_y, const char* str) {
int x = char_x;
int y = char_y;
while (*str && y < CHARS_PER_COL) {
if (*str == '\n') {
x = char_x;
y++;
}
else {
if (x < CHARS_PER_ROW) {
draw_char_at_pos(x, y, *str);
x++;
}
else {
// 自动换行
x = char_x;
y++;
if (y < CHARS_PER_COL) {
draw_char_at_pos(x, y, *str);
x++;
}
}
}
str++;
}
}
// 打印缓冲区内容(用于调试)
void print_buffer() {
for (int y = 0; y < BUFFER_HEIGHT; y++) {
for (int x = 0; x < BUFFER_WIDTH; x++) {
printf("%c", display_buffer[y][x] ? '#' : '.');
}
printf("\n");
}
}
void SetConsoleSize(int width, int height) {
HANDLE hConsole = GetStdHandle(STD_OUTPUT_HANDLE);
// 设置缓冲区大小
COORD bufferSize = { (SHORT)width, (SHORT)height };
SetConsoleScreenBufferSize(hConsole, bufferSize);
// 设置窗口大小
SMALL_RECT windowSize = { 0, 0, (SHORT)(width - 1), (SHORT)(height - 1) };
SetConsoleWindowInfo(hConsole, TRUE, &windowSize);
}
// 示例使用
int main() {
// 设置控制台为160列x120行
SetConsoleSize(160, 120);
// 清空缓冲区
clear_buffer();
// 绘制一些文本
draw_string(0, 1, "ASCII Display Test");
draw_string(0, 2, "0123456789");
draw_string(0, 3, "ABCDEFGHIJKLMNOPQRST");
draw_string(0, 4, "abcdefghijklmnopqrst");
draw_string(0, 5, "!@#$%^&*()_+-=[]{}|;");
draw_string(0, 6, "':\",./<>?`~");
print_buffer();
printf("Display buffer size: %dx%d pixels\n", BUFFER_WIDTH, BUFFER_HEIGHT);
printf("Character grid: %dx%d characters\n", CHARS_PER_ROW, CHARS_PER_COL);
printf("Output saved to display_output.pbm\n");
return 0;
}
运行结果:
2026年上海慕尼黑电子展
现在的上海正处于梅雨季,连续的阴雨让气温完全没有夏季的感觉。今年的慕尼黑电子展是7月1日到3日,和往年一样,我前往参观。
本次展览在上海新国际博览中心进行,在上海估计地铁是最方面的到达方式,场馆就在龙阳路地铁站旁边。

场馆外的大型海报
刚到时,雨还没有停,门口有着各式各样的大型海报。

RISC-V 的广告牌,相比 ARM ,RISC-V 有着巨大的成本优势

DigiKey 的巨大广告牌,他们是颇有实力的零件分销商

进场之后的海报,很多人在此驻足拍照留念
首先走马观花了Murata(株式会社村田制作所)展位:

Murata展位
这是他家推出的超声波传感器,我不清楚这种和激光测距有什么优势:

可以通过超声波实现定位跟踪
感觉这家企业正在努力转型,从常见的电容电感产品转向更精密的专用传感器,作为老牌元器件厂商,这家企业的营理念强调“磨砺精湛技术、供应独特产品”。

有可以用于测量血压的气泵以及胰岛素泵
我业余时间一直在玩USB相关的内容,特别关注了一下 WCH (沁恒微电子)。
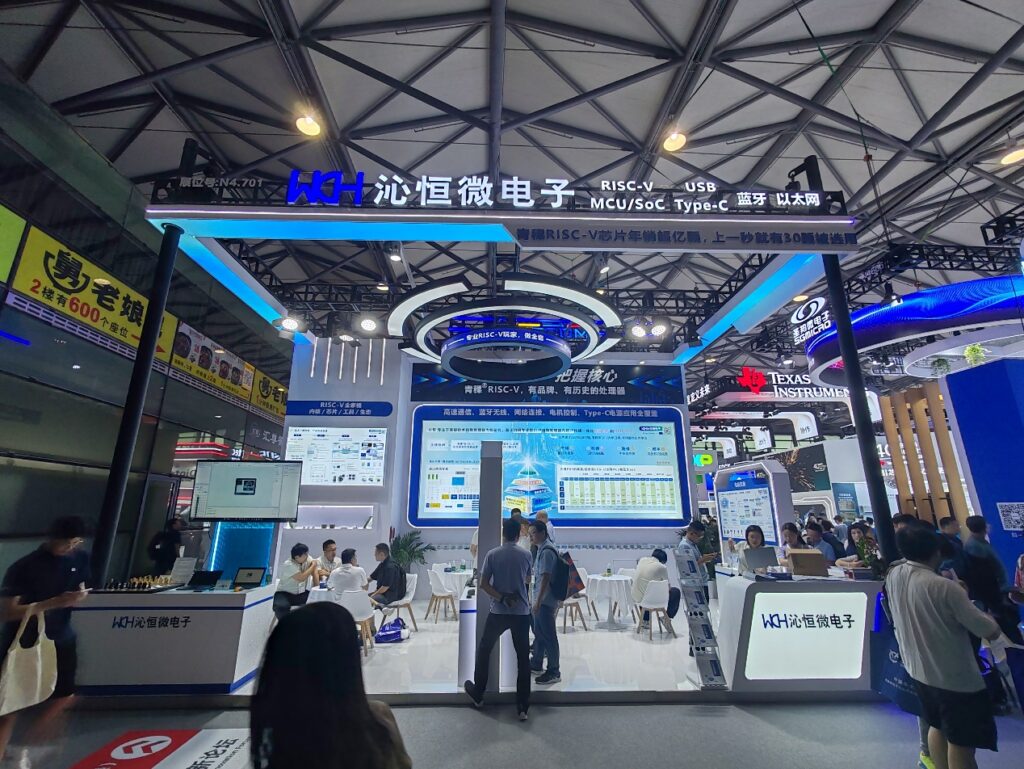
这家公司的 MCU 主推 RISC-V 产品线,有着覆盖从低端到高端的MCU (特别是USB 3.0 MCU ,几乎是普通人能拿到支持的唯一选择)

可以看到目前主要有USB/以太网/蓝牙三大产品线
除了USB目前WCH还在深耕蓝牙和无线技术:

蓝牙无线
现场看到的比较特别的产品有CH390芯片,体积极小的芯片能够轻松的给你产品插上有线网络的翅膀:

CH390 测试板
此外,还有USB 3.0隔离器。在我们的笔记本电脑上,USB 通常是直通 SoC 的(我只在一款 ThinkPad 的 产品上见过USB2.0的隔离设计)。如果在现场使用USB 进行调试,会有电流倒灌损坏 SoC 的风险。这种隔离器能够帮助你安心的使用USB 进行调试。作为BIOS工程师,我真心希望能有公司在研发设计笔记本时以寿命为目标。

此外,这次还见到了CH9338(USB2.0)的下一代 USB3.0 双机互联方案 CH9339,USB3.0 的速度更快,同时还提供了双机同屏的功能。

这里有更详细的产品介绍:


接下来是作为 DIY 爱好者,我经常使用的品牌。
首先是嘉立创集团,在这次展会上他们有2个展位
嘉立创集团的展位
现在可以在嘉立创 FA 进行铝合金外壳定制

可以直接进行产品外壳的定制
作为 DIY 爱好者,我一直使用立创EDA绘制电路,我同EDA负责人进行了友好的交流。
嘉立创 EDA 展台
嘉立创PCB一直在坚持每月2片免费PCB , 帮助无数电子爱好者成长:
立创 EDA 设计出来的电路,可以直接在立创商城下单,这个避免了封装和元件不匹配的问题,同时因为立创硬件开源平台的存在,也能最大限度参考他人设计。用阿里巴巴的话术就是“以用户心智渗透为核心抓手,打通上下游链路,拉通各端口的需求对齐,把全流程的颗粒度拉平,完成从流量触达到价值闭环的全链路赋能,沉淀出可复用的行业方法论,最终实现生态内的反哺与双向共赢。”
立创商城展位
微碧半导体,他们会在文章中分享一些 MOSFET 的设计,比如,电池防止反装。我在设计上用过他们的芯片。

微盟电子是一家南京的企业,有一些 LDO、DC-DC 的产品,如果你电压转换的需求,除了 TI 的手册还可以翻翻他们的产品手册。
厚声集团,我用过他们的很多电阻:
圣邦微电子,在大部分笔记本电脑上都会使用他们的供电芯片方案
优利德,是老牌的国产测量仪器厂商,很多人第一次接触这个品牌都是万用表,这次展出的都是示波器产品。

它的对面是同样做示波器的鼎阳品牌
鼎阳展位
还有 KeySight,当然,这种品牌对于 DIY 用户已经过于高端了

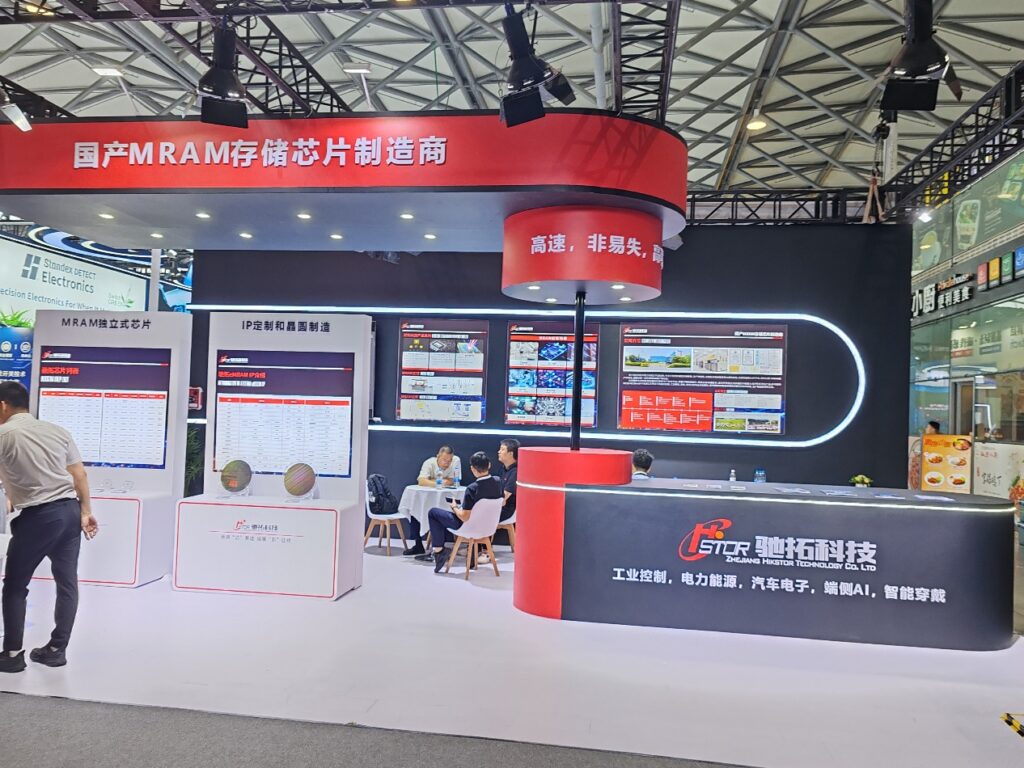
这次还看到了一家国产 MRAM 存储芯片制造商,这是我第一次听说 MRAM,查询资料得知MRAM(Magnetoresistive Random Access Memory) 是一种非易失性的磁性随机存储器,它利用磁电阻效应来存储数据。与传统的半导体随机存取存储器(RAM)不同,MRAM使用磁性隧道结(MTJ)作为存储单元,通过改变磁化方向来记录二进制数据。就是说它不需要电力维持存储,更无惧随机掉电。据说存储速度也很高。只是暂时我还想不出有什么必须的应用场景。
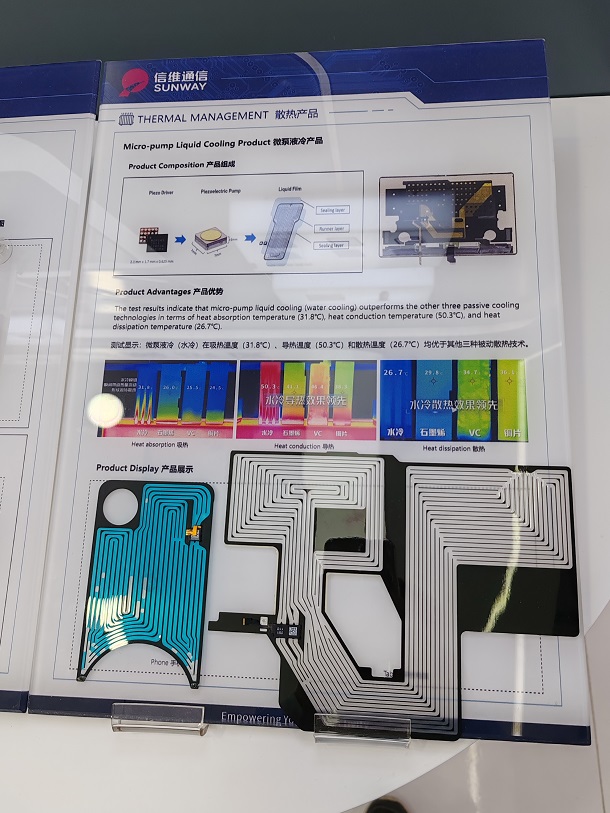
信维通信的站台上看到了微泵液冷的散热方案,不过可惜现场没有相关资料

最后讲个好玩的,没想到 Pro’s Kit(宝工)有一个很大的展位。在我仔细端详的时候,小哥热情的和我聊天。我表示作为DIY爱好者,手上有很多你们的螺丝刀之类的产品。在小哥露出满意的神情后,他问了一个让我和他都后悔的问题:你觉得我们的产品还有什么需要改进的地方吗?我脱口而出:太容易生锈。说出来之后我也觉得有些尴尬。急忙补充道:在公司用没问题,但是家用会生锈。小哥想了想终于又问出来一句:是手柄生锈吗?我回答:螺丝刀的头生锈……之后我也急忙离去避免持续的尴尬。

工业界相比学界更加务实,在整个展览中并没有太多的“AI”概念,相比往年,稍微多了一些机器人伺服电机关节的内容。
元件国产化已经是非常明显的趋势,伴随着这种趋势国产元件也在努力实践中证明自己。选用国产元件可以保证及时的供应和支持。
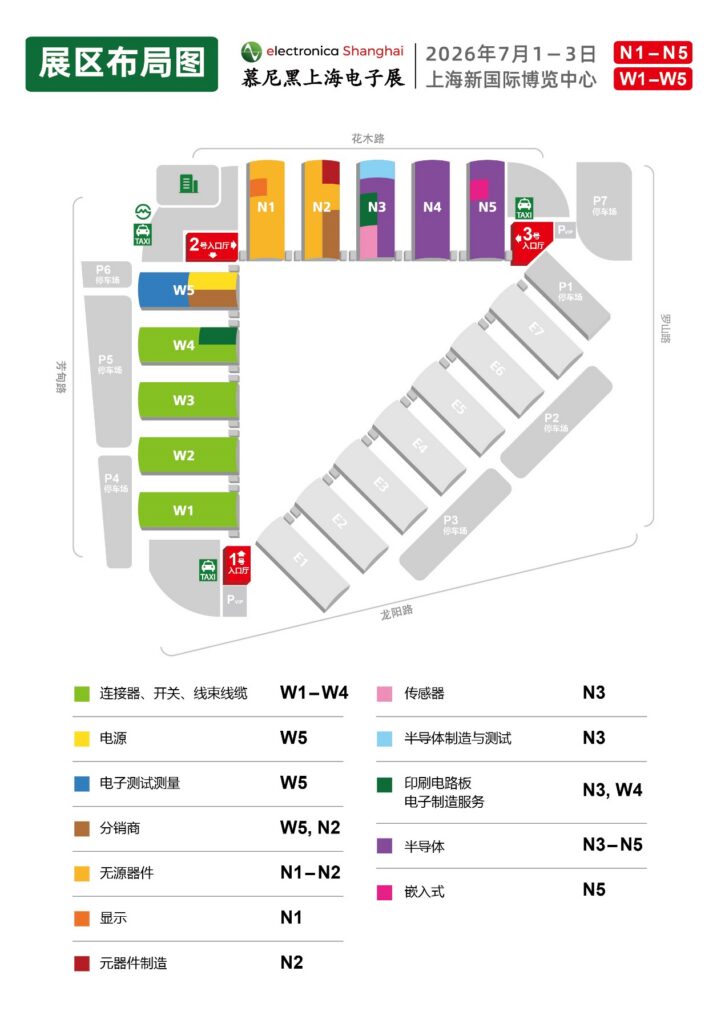
这次展览展馆分布如下,有兴趣的朋友还可以前往观看。
Step to UEFI (310)EDK2 中使用 LIB加入编译
LIB (Static Library – 静态库)和 DLL (Dynamic Link Library – 动态链接库) 都是库文件,他们存在一些差别。比如,LIB 是编译期加入到文件中,成为 EFI 或者 EXE 的一部分。而DLL则是在运行期独立存放在内存中进行调用的。
这次的实验是:在 VS2019 中使用C生成一个 LIB, 然后在 EDK2 环境下调用这个LIB。
首先编写 LIB ,源代码非常简单,LibFile.c 源代码如下:
///
/// 8-byte unsigned value
///
typedef unsigned long long int UINT64;
///
/// Unsigned value of native width. (4 bytes on supported 32-bit processor instructions,
/// 8 bytes on supported 64-bit processor instructions)
///
typedef UINT64 UINTN;
#define EFIAPI __cdecl // Force C calling convention for Microsoft C compiler
#define IN
UINTN
EFIAPI
MyLibAdd(
IN UINTN A,
IN UINTN B
)
{
return A + B;
}
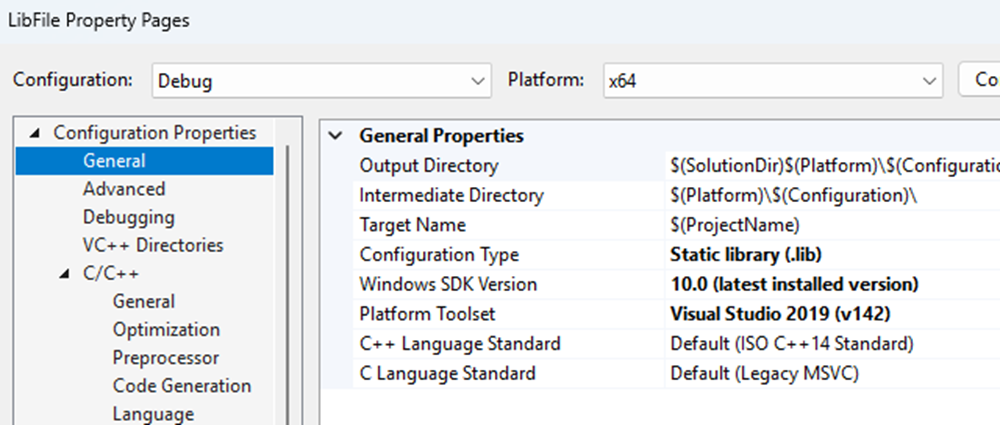
项目属性中设置编译目标为 Lib:
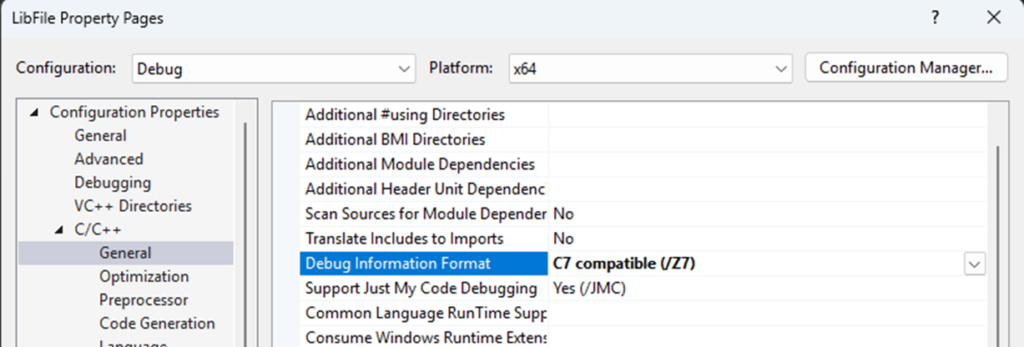
Debug 信息格式设置为 /Z7:
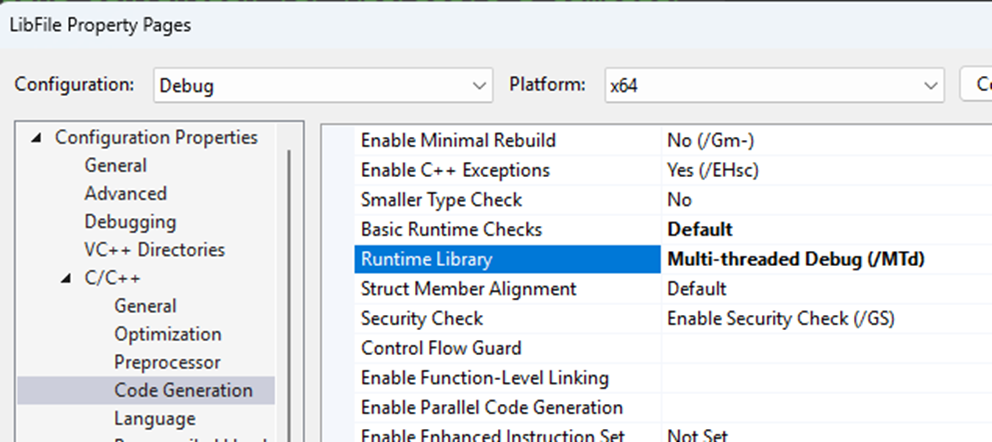
Runtime Library 设置为 /MTd
编译之后就得到了 LibFile.lib 文件。
接下来在 EDK2 中编写代码。
代码非常简单,关键点在于 extern 告诉链接器将要从外部调用 MyLibAdd() 函数。
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/ShellCEntryLib.h>
extern UINTN EFIAPI MyLibAdd(IN UINTN A,IN UINTN B);
INTN
EFIAPI
ShellAppMain (
IN UINTN Argc,
IN CHAR16 **Argv
)
{
Print(L"LibTest Result: %d \n",MyLibAdd(1,2));
return(0);
}
接下来编写 INF 文件,关键点在于 MSFT:*_*_*_DLINK_FLAGS 告诉 Lib 所在的目录位置。
[Defines]
INF_VERSION = 0x00010006
BASE_NAME = libtest
FILE_GUID = a912f198-7f0e-2026-0429-b757b806ec83
MODULE_TYPE = UEFI_APPLICATION
VERSION_STRING = 0.1
ENTRY_POINT = ShellCEntryLib
#
# VALID_ARCHITECTURES = IA32 X64
#
[Sources]
LibTest.c
[Binaries]
LIB|LibFile.lib
[Packages]
MdePkg/MdePkg.dec
ShellPkg/ShellPkg.dec
[LibraryClasses]
UefiLib
ShellCEntryLib
[BuildOptions]
MSFT:*_*_*_DLINK_FLAGS = /LIBPATH:$(WORKSPACE)/AppPkg/Applications/LibTest LibFile.lib
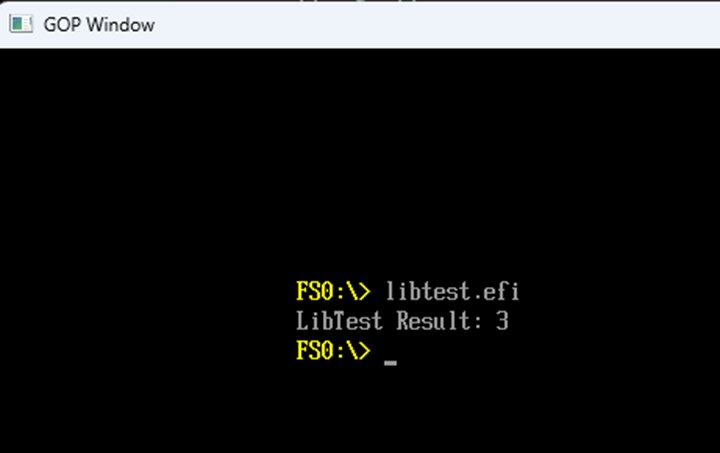
特别注意:生成的 Lib 可以有 IA32 也可以有 X64, 同时还有 Release 和Debug 版本的区别,不可以混用。相对的,如果你要提供 LIB 给他人使用,那么很可能需要同时提供 Release 和 Debug 两个版本。本次实验测试的是 X64 Lib, Debug 版本。对应的编译命令是(Default 是 Debug 版本):
build -a X64 -p AppPkg\AppPkg.dsc -t VS2019
编译后的文件在模拟器中测试:
本次实验的VC 工程文件在这里下载:
本次实验的 EDK2 代码在这里下载:
使用 Ch9338 文件传输
WCH 推出Ch9338 双机互联芯片,前面有介绍和测试过。这次介绍通过编程的方式实现双机文件互传。
在 Ch9338 的 EVT Package 中,有一份《通过CH9338 透传自定义数据说明》。本文基于该文档编写。
调用流程就是文档中描述:
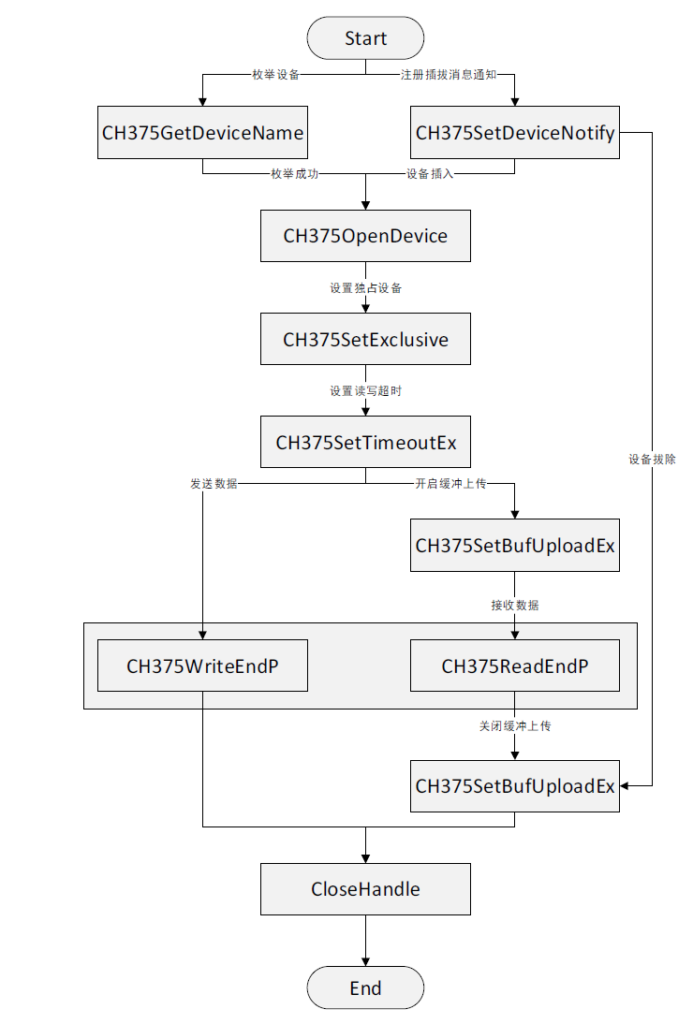
我们编写一个 Windows Console 代码。
// Ch9338Test.cpp : This file contains the 'main' function. Program execution begins and ends there.
//
#include <iostream>
#include <Windows.h>
#include <tchar.h>
#include <Dbt.h>
#include "CH375DLL.H"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdlib.h>
#include <string.h>
#pragma warning(disable:4996)
extern "C"
{
#include "setupapi.h"
}
#pragma comment(lib,"setupapi")
#pragma comment(lib, "WCHKMFU")
//记录设备序号,查找设备时记录
ULONG nDevIndex = 0;
//记录设备路径,查找设备时记录
CHAR szDevicePath[MAX_DEVICE_PATH_SIZE] = "";
//设备句柄
HANDLE hDev = INVALID_HANDLE_VALUE;
//设备的ID
#define szDevID_CH9338_U2 "VID_1A86&PID_8026&MI_01"
#define szDevID_CH9339_U2 "VID_1A86&PID_802A&MI_01"
#define szDevID_CH9339_U3 "VID_1A86&PID_802D&MI_01"
// 如果没有stdint.h,自己定义
typedef unsigned char uint8_t;
typedef unsigned short uint16_t;
typedef unsigned int uint32_t;
typedef unsigned long long uint64_t;
// 包类型定义
#define TYPE_FILE_INFO 1
#define TYPE_DATA 2
#define TYPE_ACK 3
// 包结构
#pragma pack(1)
typedef struct {
uint16_t type;
uint16_t seq;
uint16_t length;
uint16_t checksum;
} PacketHeader;
#pragma pack()
#define MAX_PACKAGE 1024*16
// 最大数据包大小
#define MAX_DATA_SIZE (MAX_PACKAGE-sizeof(PacketHeader))
#define MAX_FILENAME 256
typedef struct {
uint16_t type;
uint16_t seq;
uint16_t length;
uint16_t checksum;
uint8_t data[MAX_DATA_SIZE];
} SimplePacket;
BOOL SearchDevice()
{
PCHAR lpDevName = NULL;
CHAR szDevName[MAX_DEVICE_PATH_SIZE] = "";
//查找具有指定ID的设备
for (size_t i = 0; i < 16; i++)
{
//获取设备路径
lpDevName = (PCHAR)CH375GetDeviceName(i);
if (lpDevName != NULL)
{
strcpy_s(szDevName, MAX_DEVICE_PATH_SIZE, lpDevName);
CharUpperBuffA(szDevName, strlen(szDevName));
//检查是否具有指定的ID,是则返回
if (strstr(szDevName, szDevID_CH9338_U2) != NULL ||
strstr(szDevName, szDevID_CH9339_U2) != NULL ||
strstr(szDevName, szDevID_CH9339_U3) != NULL)
{
nDevIndex = i;
strcpy_s(szDevicePath, MAX_DEVICE_PATH_SIZE, szDevName);
return TRUE;
}
}
}
return FALSE;
}
//打开设备
BOOL OpenDevice()
{
//打开指定设备
hDev = CH375OpenDevice(nDevIndex);
if (hDev != INVALID_HANDLE_VALUE)
{
return TRUE;
}
return FALSE;
}
// 显示使用方法
void ShowUsage(void) {
printf("用法:\n");
printf("发送文件: Ch9338Test.exe -s <串口> <文件路径>\n");
printf("接收文件: Ch9338Test.exe -r <串口>\n");
printf("例如:\n");
printf(" Ch9338Test.exe -s test.txt\n");
printf(" Ch9338Test.exe -r\n");
}
// 计算校验和
unsigned short CalculateChecksum(const uint8_t* data, uint16_t length) {
uint16_t sum = 0;
int i;
for (i = 0; i < length; i++) {
sum += data[i];
}
return sum;
}
// 创建数据包
void CreatePacket(SimplePacket* pkt, uint16_t type, uint16_t seq,
const uint8_t* data, uint16_t length) {
pkt->type = type;
pkt->seq = seq;
pkt->length = length;
if (data && length > 0) {
memcpy(pkt->data, data, length);
}
pkt->checksum = CalculateChecksum(pkt->data, length);
}
// 打包数据包
int PackPacket(const SimplePacket* pkt, uint8_t* buffer) {
PacketHeader header;
header.type = pkt->type;
header.seq = pkt->seq;
header.length = pkt->length;
header.checksum = pkt->checksum;
memcpy(buffer, &header, sizeof(PacketHeader));
if (pkt->length > 0) {
memcpy(buffer + sizeof(PacketHeader), pkt->data, pkt->length);
}
return sizeof(PacketHeader) + pkt->length;
}
// 解包数据包
int UnpackPacket(const unsigned char* buffer, int bufferSize, SimplePacket* pkt) {
if (bufferSize < sizeof(PacketHeader)) {
return 0; // 数据不足
}
PacketHeader header;
memcpy(&header, buffer, sizeof(PacketHeader));
if (bufferSize < sizeof(PacketHeader) + header.length) {
return 0; // 数据不完整
}
pkt->type = header.type;
pkt->seq = header.seq;
pkt->length = header.length;
pkt->checksum = header.checksum;
if (header.length > 0) {
memcpy(pkt->data, buffer + sizeof(PacketHeader), header.length);
}
// 验证校验和
unsigned short calcChecksum = CalculateChecksum(pkt->data, pkt->length);
if (calcChecksum != pkt->checksum) {
return 0; // 校验失败
}
return 1; // 成功
}
// 发送数据
int SendData(const uint8_t* data, uint32_t length) {
DWORD bytesWritten=length;
if (!CH375WriteEndP((ULONG)hDev, 1, (PVOID) data, (PULONG)&bytesWritten)) {
printf("发送数据失败\n");
return 0;
}
return (bytesWritten == length);
}
// 接收完整的数据包
int ReceivePacket(SimplePacket* pkt) {
unsigned char headerBuffer[sizeof(PacketHeader)];
DWORD bytesRead = MAX_PACKAGE;
if (!CH375SetBufUploadEx((ULONG)hDev, 1, 1, MAX_PACKAGE)) {
printf("CH375SetBufUploadEx failed\n");
return 0;
}
CH375ReadEndP((ULONG)hDev, 1, pkt, &bytesRead);
while (bytesRead == 0) {
bytesRead = MAX_PACKAGE;
if (!CH375ReadEndP((ULONG)hDev, 1, pkt, &bytesRead)) {
printf("CH375ReadEndP error\n");
return 0;
}
Sleep(1);
}
if (!CH375SetBufUploadEx((ULONG)hDev, 0, 1, MAX_PACKAGE)) {
printf("CH375SetBufUploadEx failed\n");
return 0;
}
return UnpackPacket((unsigned char *)pkt, sizeof(PacketHeader) + pkt->length, pkt);
}
// 等待确认包
int WaitForAck() {
SimplePacket ackPkt;
if (!ReceivePacket(&ackPkt)) {
return 0;
}
return ackPkt.type == TYPE_ACK;
}
// 发送文件
int SendFile(const char* filepath) {
FILE* file;
SimplePacket pkt;
unsigned char buffer[MAX_DATA_SIZE];
unsigned char packetBuffer[sizeof(PacketHeader) + MAX_DATA_SIZE];
char filename[MAX_FILENAME];
char fileInfo[MAX_FILENAME + 32];
long filesize;
unsigned short seq = 0;
size_t bytesRead;
long totalSent = 0;
int packetSize;
clock_t start = clock();
// 打开文件
file = fopen(filepath, "rb");
if (!file) {
printf("无法打开文件: %s\n", filepath);
return 0;
}
// 获取文件大小
fseek(file, 0, SEEK_END);
filesize = ftell(file);
fseek(file, 0, SEEK_SET);
// 提取文件名
const char* lastSlash = strrchr(filepath, '\\');
if (!lastSlash) lastSlash = strrchr(filepath, '/');
if (lastSlash) {
strcpy(filename, lastSlash + 1);
}
else {
strcpy(filename, filepath);
}
// 1. 发送文件信息
sprintf(fileInfo, "%s|%ld", filename, filesize);
CreatePacket(&pkt, TYPE_FILE_INFO, 0, (unsigned char*)fileInfo, strlen(fileInfo));
packetSize = PackPacket(&pkt, packetBuffer);
printf("发送文件信息: %s\n", fileInfo);
if (!SendData(packetBuffer, packetSize)) {
printf("SendData Failed\n");
fclose(file);
return 0;
}
if (!WaitForAck()) {
printf("文件信息确认失败\n");
fclose(file);
return 0;
}
// 2. 发送文件数据
while (1) {
bytesRead = fread(buffer, 1, MAX_DATA_SIZE, file);
seq++;
CreatePacket(&pkt, TYPE_DATA, seq, buffer, (unsigned short)bytesRead);
packetSize = PackPacket(&pkt, packetBuffer);
printf("发送数据包 %d, 大小: %d 字节\n", seq, (int)bytesRead);
if (!SendData(packetBuffer, packetSize)) {
fclose(file);
return 0;
}
if (!WaitForAck()) {
printf("数据包 %d 确认失败\n", seq);
fclose(file);
return 0;
}
totalSent += bytesRead;
//printf("进度: %ld/%ld\n", totalSent, filesize);
// 如果是空数据包,表示结束
if (bytesRead == 0) {
break;
}
}
fclose(file);
clock_t end = clock();
printf("文件发送完成, 耗时 %.3fms 速度:%.2fKB/S!\n",
((double)(end - start) / CLOCKS_PER_SEC) * 1000.0,
filesize/1024/ ((double)(end - start) / CLOCKS_PER_SEC));
return 1;
}
// 接收文件
int ReceiveFile() {
SimplePacket pkt;
SimplePacket ackPkt;
unsigned char packetBuffer[sizeof(PacketHeader) + MAX_DATA_SIZE];
char filename[MAX_FILENAME];
char fileInfo[MAX_FILENAME + 32];
char* separator;
long filesize;
unsigned short expectedSeq = 1;
long totalReceived = 0;
FILE* outFile;
int packetSize;
// 1. 接收文件信息
printf("等待接收文件信息...\n");
if (!ReceivePacket(&pkt)) {
printf("未收到文件信息包\n");
return 0;
}
if (pkt.type != TYPE_FILE_INFO) {
printf("收到的不是文件信息包\n");
return 0;
}
// 解析文件信息
memcpy(fileInfo, pkt.data, pkt.length);
fileInfo[pkt.length] = '\0';
separator = strchr(fileInfo, '|');
if (!separator) {
printf("文件信息格式错误\n");
return 0;
}
*separator = '\0';
strcpy(filename, fileInfo);
filesize = atol(separator + 1);
printf("准备接收文件: %s, 大小: %ld 字节\n", filename, filesize);
// 发送确认
CreatePacket(&ackPkt, TYPE_ACK, 0, NULL, 0);
packetSize = PackPacket(&ackPkt, packetBuffer);
if (!SendData(packetBuffer, packetSize)) {
return 0;
}
// 2. 接收文件数据
outFile = fopen(filename, "wb");
if (!outFile) {
printf("无法创建输出文件: %s\n", filename);
return 0;
}
while (1) {
printf("等待数据包 %d...\n", expectedSeq);
if (!ReceivePacket(&pkt)) {
printf("接收数据包失败\n");
fclose(outFile);
return 0;
}
if (pkt.type != TYPE_DATA) {
printf("收到非数据包\n");
continue;
}
if (pkt.seq == expectedSeq) {
// 发送确认
CreatePacket(&ackPkt, TYPE_ACK, pkt.seq, NULL, 0);
packetSize = PackPacket(&ackPkt, packetBuffer);
SendData(packetBuffer, packetSize);
// 检查是否为空数据包(结束标志)
if (pkt.length == 0) {
printf("收到空数据包,传输结束\n");
break;
}
// 写入数据
fwrite(pkt.data, 1, pkt.length, outFile);
totalReceived += pkt.length;
expectedSeq++;
printf("收到数据包 %d, 进度: %ld/%ld\n", pkt.seq, totalReceived, filesize);
}
else {
printf("序列号错误,期望: %d, 收到: %d\n", expectedSeq, pkt.seq);
}
}
fclose(outFile);
printf("文件接收完成: %s\n", filename);
return 1;
}
int main(int argc, char* argv[])
{
// 参数不够,提示
if (argc < 2) {
ShowUsage();
return 1;
}
//查找设备
if (SearchDevice())
{
printf("%s\r\n", szDevicePath);
}
else
{
printf("无法找到 Ch9338 设备\r\n");
return 1;
}
//打开设备
if (OpenDevice())
{
//设置独占设备,防止其他进程操作此设备
if (!CH375SetExclusive((ULONG)hDev, 1))
{
printf("CH375SetExclusive Error\r\n");
}
printf("OpenDevice Successful\r\n");
}
else
{
printf("OpenDevice failed\r\n");
return 2;
}
const char* mode = argv[1];
if (strcmp(mode, "-s") == 0 || strcmp(mode, "/s") == 0) {
// 发送模式
if (argc < 3) {
printf("发送模式需要指定文件路径\n");
ShowUsage();
return 1;
}
const char* filepath = argv[2];
printf("%s\n", filepath);
if (SendFile(filepath)) {
printf("文件发送成功!\n");
}
else {
printf("文件发送失败!\n");
return 1;
}
}
else if (strcmp(mode, "-r") == 0 || strcmp(mode, "/r") == 0) {
//接收模式
if (ReceiveFile()) {
printf("文件接收成功!\n");
}
else {
printf("文件接收失败!\n");
return 1;
}
}
else {
printf("未知模式: %s\n", mode);
ShowUsage();
return 1;
}
//关闭设备
if (hDev != INVALID_HANDLE_VALUE)
{
CloseHandle(hDev);
hDev = INVALID_HANDLE_VALUE;
printf("Close device \r\n");
}
return 0;
}
通讯协议使用之前设计的。
特别注意的是:
1.代码依赖官方提供的 WCHKMFU.lib ,我拿到的只有 32位的,因此代码需要使用 x86 编译
2.根据 Ch375DLL.h 的信息,缓冲区可以最高开到 150MB。缓冲越大,传输效率越高,速度越快。不过我的代码堆限制了局部变量的最大值,如果想改的很大需要优化一些结构。
BOOL WINAPI CH375WriteEndP( // 写出数据块
ULONG iIndex, // 指定CH375设备序号
ULONG iEndP, // 端点号,有效值为1到8。
PVOID iBuffer, // 指向一个缓冲区,放置准备写出的数据
PULONG ioLength ); // 指向长度单元,输入时为准备写出的长度,返回后为实际写出的长度
完整的代码和EXE 下载