最近在调试一个程序,在设置了 Multi-threaded (/MT) 之后,编译时出现下午的错误
Error LNK2001 unresolved external symbol guard_check_icall$fo$
根据搜索结果,这个可能和 SDK 有关系,于是下载最新的 26100 的 SDK(26100.8038.260310-1641.ge_release_svc_im_WindowsSDK)安装后问题就解决了。
最近在调试一个程序,在设置了 Multi-threaded (/MT) 之后,编译时出现下午的错误
Error LNK2001 unresolved external symbol guard_check_icall$fo$
根据搜索结果,这个可能和 SDK 有关系,于是下载最新的 26100 的 SDK(26100.8038.260310-1641.ge_release_svc_im_WindowsSDK)安装后问题就解决了。
在物联网获得数据的过程中,HTTP 和 HTTPS 还是有蛮大区别的。
curl -X POST https://httpbin.org/post -H "Content-Type: application/json" -d '{"name": "test", "value": "123"}'
返回值
{
"args": {},
"data": "{name: test, value: 123}",
"files": {},
"form": {},
"headers": {
"Accept": "*/*",
"Content-Length": "24",
"Content-Type": "application/json",
"Host": "httpbin.org",
"User-Agent": "curl/8.7.0",
"X-Amzn-Trace-Id": "Root=1-69ddf67f-75016f90629ad2556d1387f1"
},
"json": null,
"origin": "117.143.53.223",
"url": "https://httpbin.org/post"
}
2.编写 ESP32 Arduino 代码
#include <WiFi.h>
#include <WiFiClientSecure.h>
// 设置 Wi-Fi 凭据,
const char* ssid = "你的 WIFI 名称";
const char* password = "对应的密码";
// 目标服务器信息
const char* server = "httpbin.org"; // 域名
const int port = 443; // HTTPS 默认端口
const char* path = "/post"; // 请求路径
// 创建安全客户端对象
WiFiClientSecure client;
void setup() {
Serial.begin(115200);
delay(1000);
// 连接 Wi-Fi
Serial.println("正在连接 Wi-Fi...");
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("\nWi-Fi 连接成功!");
Serial.print("IP 地址: ");
Serial.println(WiFi.localIP());
// 设置 HTTPS 客户端(跳过证书验证,仅用于测试)
client.setInsecure(); // 注意:生产环境中应使用证书验证
// 发送 POST 请求
sendPostRequest();
}
void loop() {
// 主循环为空,仅执行一次请求
}
void sendPostRequest() {
Serial.println("正在连接服务器...");
if (!client.connect(server, port)) {
Serial.println("连接服务器失败!");
return;
}
Serial.println("服务器连接成功!");
// 构建 POST 请求数据(JSON 格式)
String postData = "{\"name\":\"test\",\"value\":\"123\"}";
// 构建 HTTP 请求头
String request = "POST " + String(path) + " HTTP/1.1\r\n";
request += "Host: " + String(server) + "\r\n";
request += "Content-Type: application/json\r\n";
request += "Content-Length: " + String(postData.length()) + "\r\n";
request += "Connection: close\r\n\r\n"; // 关闭连接
request += postData;
// 发送请求
Serial.println("发送 POST 请求...");
client.print(request);
Serial.println("请求已发送!");
// 等待并读取响应
Serial.println("服务器响应:");
unsigned long timeout = millis();
while (client.connected() || client.available()) {
if (client.available()) {
String line = client.readStringUntil('\n');
Serial.println(line);
}
// 超时处理
if (millis() - timeout > 5000) {
Serial.println("响应超时!");
break;
}
}
// 断开连接
client.stop();
Serial.println("连接已关闭。");
}
运行结果串口输出如下:
请求已发送!
服务器响应:
HTTP/1.1 200 OK
Date: Tue, 14 Apr 2026 08:21:05 GMT
Content-Type: application/json
Content-Length: 412
Connection: close
Server: gunicorn/19.9.0
Access-Control-Allow-Origin: *
Access-Control-Allow-Credentials: true
{
"args": {},
"data": "{\"name\":\"test\",\"value\":\"123\"}",
"files": {},
"form": {},
"headers": {
"Content-Length": "29",
"Content-Type": "application/json",
"Host": "httpbin.org",
"X-Amzn-Trace-Id": "Root=1-69ddf8f1-007fb8cc07ce50765cddb2f1"
},
"json": {
"name": "test",
"value": "123"
},
"origin": "117.143.53.223",
"url": "https://httpbin.org/post"
}
[ 7009][E][ssl_client.cp
另外一个例子,看起来更容易理解一些:
#include <WiFi.h>
#include <HTTPClient.h>
#include <WiFiClientSecure.h>
#include <ArduinoJson.h>
// WiFi凭据
const char* ssid = "your_wifi_ssid";
const char* password = "your_wifi_password";
void setup() {
Serial.begin(115200);
// 连接WiFi
WiFi.begin(ssid, password);
Serial.print("连接WiFi");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println();
Serial.println("WiFi连接成功!");
Serial.print("IP地址: ");
Serial.println(WiFi.localIP());
// 发送HTTPS POST请求
sendHttpsPostRequest();
}
void loop() {
// 空循环
}
void sendHttpsPostRequest() {
// 创建WiFiClientSecure对象用于HTTPS
WiFiClientSecure *client = new WiFiClientSecure;
if(client) {
// 设置为不验证SSL证书(用于测试,生产环境建议验证证书)
client->setInsecure();
// 或者如果你想验证证书,可以设置根CA证书
// client->setCACert(rootCACertificate);
HTTPClient https;
Serial.println("[HTTPS] 开始连接...");
if (https.begin(*client, "https://httpbin.org/post")) {
Serial.println("[HTTPS] 连接成功");
// 设置HTTP头
https.addHeader("Content-Type", "application/json");
https.addHeader("Token", "abc");
// 准备JSON数据
String jsonPayload = "{\"cityCode\":\"310100\",\"isGetStopArrive\":\"1\",\"lon\":\"121.3747863\",\"lat\":\"31.11027359\",\"limit\":20,\"offset\":0,\"coordinateType\":1}";
Serial.println("发送HTTPS POST请求到: https://httpbin.org/post");
Serial.println("请求头: Token=abc");
Serial.println("请求体: " + jsonPayload);
// 发送POST请求
int httpResponseCode = https.POST(jsonPayload);
if (httpResponseCode > 0) {
String response = https.getString();
Serial.println("HTTPS响应代码: " + String(httpResponseCode));
Serial.println("响应内容:");
Serial.println(response);
} else {
Serial.println("HTTPS请求失败");
Serial.println("错误代码: " + String(httpResponseCode));
Serial.println("错误信息: " + https.errorToString(httpResponseCode));
}
// 关闭连接
https.end();
} else {
Serial.println("[HTTPS] 无法连接");
}
// 删除客户端对象
delete client;
} else {
Serial.println("无法创建WiFiClientSecure客户端");
}
}
之前提到过,UEFI 上没有 E820 ,而是通过gBS->GetMemoryMap() 来获得当前内存分配情况,这里给出了一个驱动代码,可以在UEFI Shell 下加载,他会替换之前的GetMemoryMap() 函数,基于之前的返回值增加一个条目:0xFED00000-0xFED1FFFF ,报告为 available 。
HookMemoryMapDxe.c
/** @file
Memory Map Hook DXE Driver
Hooks GetMemoryMap to add a fake memory region
**/
#include <Uefi.h>
#include <Library/UefiDriverEntryPoint.h>
#include <Library/UefiBootServicesTableLib.h>
#include <Library/MemoryAllocationLib.h>
#include <Library/BaseMemoryLib.h>
#include <Library/DebugLib.h>
// Hook Protocol GUID
#define MEMORY_MAP_HOOK_PROTOCOL_GUID \
{ 0x87654321, 0x4321, 0x8765, { 0xab, 0xcd, 0xef, 0x12, 0x34, 0x56, 0x78, 0x90 } }
EFI_GUID gMemoryMapHookProtocolGuid = MEMORY_MAP_HOOK_PROTOCOL_GUID;
// Hook数据结构
typedef struct {
UINT32 Signature;
EFI_GET_MEMORY_MAP OriginalGetMemoryMap;
EFI_PHYSICAL_ADDRESS FakeMemoryStart;
UINT64 FakeMemoryPages;
BOOLEAN HookEnabled;
} MEMORY_MAP_HOOK_DATA;
#define HOOK_SIGNATURE SIGNATURE_32('H','M','A','P')
// 全局变量
STATIC MEMORY_MAP_HOOK_DATA *gHookData = NULL;
STATIC EFI_HANDLE gProtocolHandle = NULL;
STATIC EFI_EVENT gExitBootServicesEvent = NULL;
/**
Hooked GetMemoryMap function
**/
EFI_STATUS
EFIAPI
HookedGetMemoryMap (
IN OUT UINTN *MemoryMapSize,
IN OUT EFI_MEMORY_DESCRIPTOR *MemoryMap,
OUT UINTN *MapKey,
OUT UINTN *DescriptorSize,
OUT UINT32 *DescriptorVersion
)
{
EFI_STATUS Status;
UINTN OriginalMapSize;
EFI_MEMORY_DESCRIPTOR *OriginalMap;
UINTN NewMapSize;
UINTN EntryCount;
UINTN Index;
BOOLEAN NeedToAddEntry = TRUE;
// 检查Hook是否启用
if (gHookData == NULL || !gHookData->HookEnabled || gHookData->OriginalGetMemoryMap == NULL) {
return EFI_UNSUPPORTED;
}
// 如果MemoryMap为NULL,只是查询大小
if (MemoryMap == NULL) {
Status = gHookData->OriginalGetMemoryMap(MemoryMapSize, MemoryMap, MapKey, DescriptorSize, DescriptorVersion);
if (Status == EFI_BUFFER_TOO_SMALL) {
// 为新增的条目预留空间
*MemoryMapSize += *DescriptorSize;
}
return Status;
}
// 分配临时缓冲区
OriginalMapSize = *MemoryMapSize + *DescriptorSize;
OriginalMap = AllocatePool(OriginalMapSize);
if (OriginalMap == NULL) {
return EFI_OUT_OF_RESOURCES;
}
// 调用原始的GetMemoryMap
Status = gHookData->OriginalGetMemoryMap(&OriginalMapSize, OriginalMap, MapKey, DescriptorSize, DescriptorVersion);
if (EFI_ERROR(Status)) {
FreePool(OriginalMap);
return Status;
}
EntryCount = OriginalMapSize / *DescriptorSize;
// 检查是否已经存在重叠的内存区域
for (Index = 0; Index < EntryCount; Index++) {
EFI_MEMORY_DESCRIPTOR *Entry = (EFI_MEMORY_DESCRIPTOR *)((UINT8 *)OriginalMap + Index * (*DescriptorSize));
EFI_PHYSICAL_ADDRESS EntryStart = Entry->PhysicalStart;
EFI_PHYSICAL_ADDRESS EntryEnd = EntryStart + (Entry->NumberOfPages * EFI_PAGE_SIZE) - 1;
// 检查是否与新条目重叠
if ((gHookData->FakeMemoryStart >= EntryStart && gHookData->FakeMemoryStart <= EntryEnd) ||
(gHookData->FakeMemoryStart + (gHookData->FakeMemoryPages * EFI_PAGE_SIZE) - 1 >= EntryStart &&
gHookData->FakeMemoryStart + (gHookData->FakeMemoryPages * EFI_PAGE_SIZE) - 1 <= EntryEnd)) {
NeedToAddEntry = FALSE;
break;
}
}
// 计算新的内存映射大小
if (NeedToAddEntry) {
NewMapSize = OriginalMapSize + *DescriptorSize;
} else {
NewMapSize = OriginalMapSize;
}
// 检查提供的缓冲区是否足够大
if (*MemoryMapSize < NewMapSize) {
*MemoryMapSize = NewMapSize;
FreePool(OriginalMap);
return EFI_BUFFER_TOO_SMALL;
}
// 复制原始内存映射
CopyMem(MemoryMap, OriginalMap, OriginalMapSize);
// 如果需要,添加新的内存条目
if (NeedToAddEntry) {
EFI_MEMORY_DESCRIPTOR *NewEntry = (EFI_MEMORY_DESCRIPTOR *)((UINT8 *)MemoryMap + OriginalMapSize);
NewEntry->Type = EfiConventionalMemory; // Available memory
NewEntry->PhysicalStart = gHookData->FakeMemoryStart;
NewEntry->VirtualStart = 0;
NewEntry->NumberOfPages = gHookData->FakeMemoryPages;
NewEntry->Attribute = EFI_MEMORY_WB; // Write-back cacheable
}
*MemoryMapSize = NewMapSize;
FreePool(OriginalMap);
return EFI_SUCCESS;
}
/**
ExitBootServices event handler
**/
VOID
EFIAPI
ExitBootServicesNotify (
IN EFI_EVENT Event,
IN VOID *Context
)
{
// 在ExitBootServices之前恢复原始函数指针
if (gHookData != NULL && gHookData->HookEnabled && gHookData->OriginalGetMemoryMap != NULL) {
gBS->GetMemoryMap = gHookData->OriginalGetMemoryMap;
// 更新CRC32
gBS->Hdr.CRC32 = 0;
gBS->CalculateCrc32((UINT8 *)gBS, gBS->Hdr.HeaderSize, &gBS->Hdr.CRC32);
gHookData->HookEnabled = FALSE;
}
}
/**
Driver entry point
@param ImageHandle The image handle
@param SystemTable The system table
@retval EFI_SUCCESS Driver loaded successfully
**/
EFI_STATUS
EFIAPI
HookMemoryMapDxeEntry (
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
)
{
EFI_STATUS Status;
DEBUG((DEBUG_INFO, "HookMemoryMapDxe: Driver starting...\n"));
// 分配Hook数据结构
gHookData = AllocateRuntimeZeroPool(sizeof(MEMORY_MAP_HOOK_DATA));
if (gHookData == NULL) {
DEBUG((DEBUG_ERROR, "HookMemoryMapDxe: Failed to allocate hook data\n"));
return EFI_OUT_OF_RESOURCES;
}
// 初始化Hook数据
gHookData->Signature = HOOK_SIGNATURE;
gHookData->OriginalGetMemoryMap = gBS->GetMemoryMap;
gHookData->FakeMemoryStart = 0xFED00000; // 0xFED00000-0xFED1FFFF
gHookData->FakeMemoryPages = 0x20000 / EFI_PAGE_SIZE; // 128KB = 32 pages
gHookData->HookEnabled = FALSE;
// 安装Protocol (用于标识和查找)
Status = gBS->InstallProtocolInterface(
&gProtocolHandle,
&gMemoryMapHookProtocolGuid,
EFI_NATIVE_INTERFACE,
gHookData
);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "HookMemoryMapDxe: Failed to install protocol: %r\n", Status));
FreePool(gHookData);
gHookData = NULL;
return Status;
}
// 创建ExitBootServices事件
Status = gBS->CreateEvent(
EVT_SIGNAL_EXIT_BOOT_SERVICES,
TPL_NOTIFY,
ExitBootServicesNotify,
NULL,
&gExitBootServicesEvent
);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_WARN, "HookMemoryMapDxe: Failed to create ExitBootServices event: %r\n", Status));
// 不是致命错误,继续执行
}
// 安装Hook
gBS->GetMemoryMap = HookedGetMemoryMap;
// 更新CRC32
gBS->Hdr.CRC32 = 0;
gBS->CalculateCrc32((UINT8 *)gBS, gBS->Hdr.HeaderSize, &gBS->Hdr.CRC32);
// 启用Hook
gHookData->HookEnabled = TRUE;
DEBUG((DEBUG_INFO, "HookMemoryMapDxe: Driver loaded successfully\n"));
DEBUG((DEBUG_INFO, "HookMemoryMapDxe: Hook installed and enabled\n"));
DEBUG((DEBUG_INFO, "HookMemoryMapDxe: Fake memory region: 0x%lx-0x%lx\n",
gHookData->FakeMemoryStart,
gHookData->FakeMemoryStart + (gHookData->FakeMemoryPages * EFI_PAGE_SIZE) - 1));
return EFI_SUCCESS;
}
HookMemoryMapDxe.inf
这个代码需要放置在MdeModulePkg下面,然后在MdeModulePkg.dsc添加:
[PcdsDynamicExDefault]
gEfiMdeModulePkgTokenSpaceGuid.PcdRecoveryFileName|L"FVMAIN.FV"
[Components]
MdeModulePkg/HookMemoryMapDxe/HookMemoryMapDxe.inf
MdeModulePkg/Application/HelloWorld/HelloWorld.inf
MdeModulePkg/Application/DumpDynPcd/DumpDynPcd.inf
MdeModulePkg/Application/MemoryProfileInfo/MemoryProfileInfo.inf
之后,使用下面的命令进行编译即可:
build -a X64 -p MdeModulePkg/MdeModulePkg.dsc -t VS2019
完整的代码下载:
使用时,只需要在 UEFI Shell 下 load HookMemoryMapDxe.efi 即可,之后可以使用 memmap 命令看到改动结果。
特别注意:这里只是一个Demo ,实际使用时需要根据你的需求进行修改。
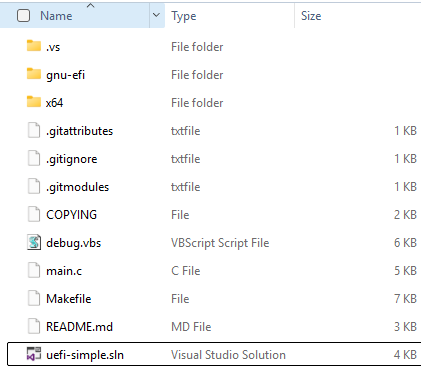
pbatard 在GitHub 上提供了一个轻量级UEFI 编译环境(https://github.com/pbatard/uefi-simple),用户可以直接在 Visual Studio 中直接创建项目,然后使用 GNU-EFI 来进行编译。
下载之后可以看到项目提供了一个 VC 的工程文件作为例子,可以使用 VS2019 直接打开。
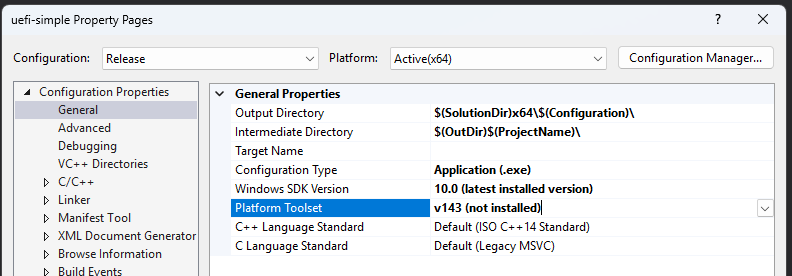
打开之后编译会发生错误,因为这个项目是 VS2022 的。修改的方法是在项目中搜索所有的 V143 字样,修改为 V142
比如,uefi-simple.vs\msvc\uefi-simple.vcxproj 中的下面<PlatformToolset> 中给出的
<PropertyGroup Condition="'$(Configuration)|$(Platform)'=='Debug|x64'" Label="Configuration">
<ConfigurationType>Application</ConfigurationType>
<UseDebugLibraries>true</UseDebugLibraries>
<PlatformToolset>v143</PlatformToolset>
<CharacterSet>Unicode</CharacterSet>
</PropertyGroup>
另外还要修改项目的属性中, Platform Toolset 为 v142
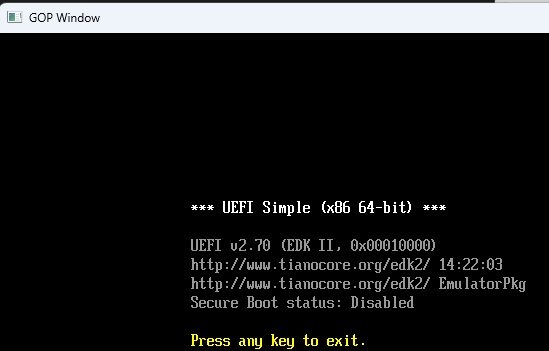
修改之后就可以直接 Build 出来需要的 EFI 文件了(main.c)

在模拟器中运行结果如下:
修改后的,能直接在 VS2019 下编译的可以在这里下载
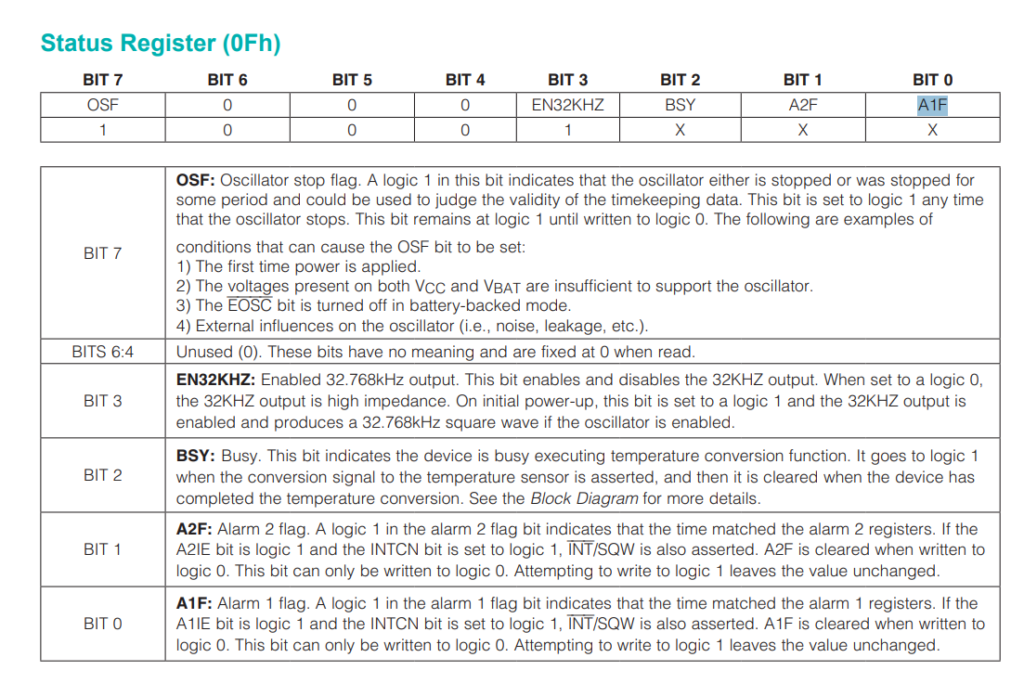
仍然使用之前提到的模块 https://www.lab-z.com/ds3231165/ 。这个模块已经有内部上拉了,因此中断 Pin 无需再额外上拉。
这次遇到的问题是中断经常触发,打开Alarm1 后就立即触发。经过研究发现这是因为没有清除A1F 导致的,之前触发过Alarm1 中断后这个Flag 就会一直处于 1(触发状态)。当再次Enable Alarm1 后,就会继续拉低 Interrupt
解决方法是在关闭 Alarm 1的时候多做一个动作:
// 特别注意必须用下面函数清除 Interrupt Flag 否则只要 Enable Alarm 就会触发
myRTC.checkIfAlarm(1);
// 关闭 Alarm1
myRTC.turnOffAlarm(1);
完整的测试代码如下:
#include <Wire.h>
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiMulti.h>
#include <HTTPClient.h>
#include <ArduinoJson.h>
#include <DS3231.h>
DS3231 myRTC;
RTClib CurrentTime;
WiFiMulti wifiMulti;
JsonDocument doc;
const char* ssid = "CMCC-TSR6739";
const char* password = "!!1783az";
void showdate() {
bool century;
bool h12Flag;
bool pmFlag;
Serial.print(myRTC.getYear(), DEC);
Serial.print("-");
Serial.print(myRTC.getMonth(century), DEC);
Serial.print("-");
Serial.print(myRTC.getDate(), DEC);
Serial.print(" ");
Serial.print(myRTC.getDoW(), DEC);
Serial.print(" ");
Serial.print(myRTC.getHour(h12Flag, pmFlag), DEC); //24-hr
Serial.print(":");
Serial.print(myRTC.getMinute(), DEC);
Serial.print(":");
Serial.println(myRTC.getSecond(), DEC);
}
void setup() {
wifiMulti.addAP(ssid, password);
Serial.begin(115200);
Serial.println("Start");
Wire.begin();
delay(100);
myRTC.setClockMode(false); // set to 24h
pinMode(14, INPUT_PULLUP);
}
// 设置 seconds 秒后的闹钟
void SetAlart(uint32_t seconds) {
DateTime Current = CurrentTime.now();
printf("%d\n", Current.unixtime());
printf("%d %d %d %d %d %d \n",
Current.year(), Current.month(), Current.day(),
Current.hour(), Current.minute(), Current.second());
Current = DateTime(Current.unixtime() + seconds);
printf("%d\n", Current.unixtime());
printf("%d %d %d %d %d %d \n",
Current.year(), Current.month(), Current.day(),
Current.hour(), Current.minute(), Current.second());
// 1分钟后触发
myRTC.setA1Time(Current.day(), Current.hour(), Current.minute(), Current.second(), 0, false, false, false);
// myRTC.setA1Time(Current.day(), Current.hour(), Current.minute(), Current.second()+20, 0, false, false, false);
// 打开闹钟
myRTC.turnOnAlarm(1);
}
uint8_t geti2c(uint8_t reg) {
Wire.beginTransmission(0x68);
Wire.write(reg);
Wire.endTransmission();
Wire.requestFrom(0x68, 1);
return Wire.read();
}
unsigned long char_to_uint32(const char* t) {
unsigned long result = 0;
for (int i = 0; i < 14; i++) {
if (t[i] >= '0' && t[i] <= '9') {
result = result * 10 + (t[i] - '0');
}
}
result = result + 8 * 3600;
return result;
}
void loop() {
while (Serial.available()) {
char c = Serial.read();
if (c == '1') {
// 从互联网取得当前时间
Serial.print("测试:从互联网获得当前时间, 并且设置给 RTC:");
// 从互联网取得时间
if ((wifiMulti.run() == WL_CONNECTED)) {
HTTPClient http;
//http.begin("http://quan.suning.com/getSysTime.do"); //HTTP
http.begin("http://api.k780.com/?app=life.time&appkey=10003&sign=b59bc3ef6191eb9f747dd4e83c99f2a4&format=json");
int httpCode = http.GET();
// httpCode will be negative on error
if (httpCode > 0) {
String payload = http.getString();
// 解析JSON数据
DeserializationError error = deserializeJson(doc, payload);
Serial.println(doc["result"]["timestamp"].as<const char*>());
myRTC.adjust(char_to_uint32(doc["result"]["timestamp"].as<const char*>()));
} else {
Serial.println("Http 访问出错");
}
http.end();
} else {
Serial.println("WIFI 未连接");
}
Serial.print("测试结束");
}
if (c == '2') {
// 显示当前时间
showdate();
}
if (c == '3') {
// 设置 20秒后触发中断,对应引脚会变低
SetAlart(20);
}
if (c == '4') {
// 关闭闹钟
Serial.println("TurnOff Alarm");
// 特别注意必须用下面函数清除 Interrupt Flag 否则只要 Enable Alarm 就会触发
myRTC.checkIfAlarm(1);
// 关闭 Alarm1
myRTC.turnOffAlarm(1);
}
if (c == '5') {
// 检查闹钟状态
if (myRTC.checkAlarmEnabled(1)) {
Serial.println("闹钟 Enabled");
if (myRTC.checkIfAlarm(1, false)) {
Serial.println("闹钟已触发");
} else {
Serial.println("闹钟未触发");
}
} else {
Serial.println("闹钟 Disabled");
}
}
if (c == '6') {
// 输出当前闹钟设定的时间
byte alarmDay, alarmHour, alarmMinute, alarmSecond, alarmBits;
bool alarmDy, alarmH12Flag, alarmPmFlag;
// Display Alarm 1 information
myRTC.getA1Time(alarmDay, alarmHour, alarmMinute, alarmSecond, alarmBits, alarmDy, alarmH12Flag, alarmPmFlag);
Serial.print(alarmDay, DEC);
if (alarmDy) {
Serial.print(" DoW");
} else {
Serial.print(" Date");
}
Serial.print(' ');
Serial.print(alarmHour, DEC);
Serial.print(' ');
Serial.print(alarmMinute, DEC);
Serial.print(' ');
Serial.print(alarmSecond, DEC);
Serial.print(' ');
if (alarmH12Flag) {
if (alarmPmFlag) {
Serial.print("pm ");
} else {
Serial.print("am ");
}
}
Serial.printf("alarmBits:%x %x \n", alarmBits, alarmDy);
Serial.println(' ');
}
if (c == '7') {
// 寄存器检测
printf("0x07: %d\n", geti2c(0x07));
printf("0x08: %d\n", geti2c(0x08));
printf("0x09: %d\n", geti2c(0x09));
printf("0x0A: %d\n", geti2c(0x0A));
printf("0x0E: %d\n", geti2c(0x0E));
printf("0x0F: %d\n", geti2c(0x0F));
}
}
}
作为BIOS工程师,单纯的 BIOS问题不多,更多的时间是在处理各种兼容性问题。BIOS最开始的目标就是用于统一硬件接口,以便软件和操作系统控制硬件。自然而然,客户遇到问题时首先会想到找BIOS工程师。
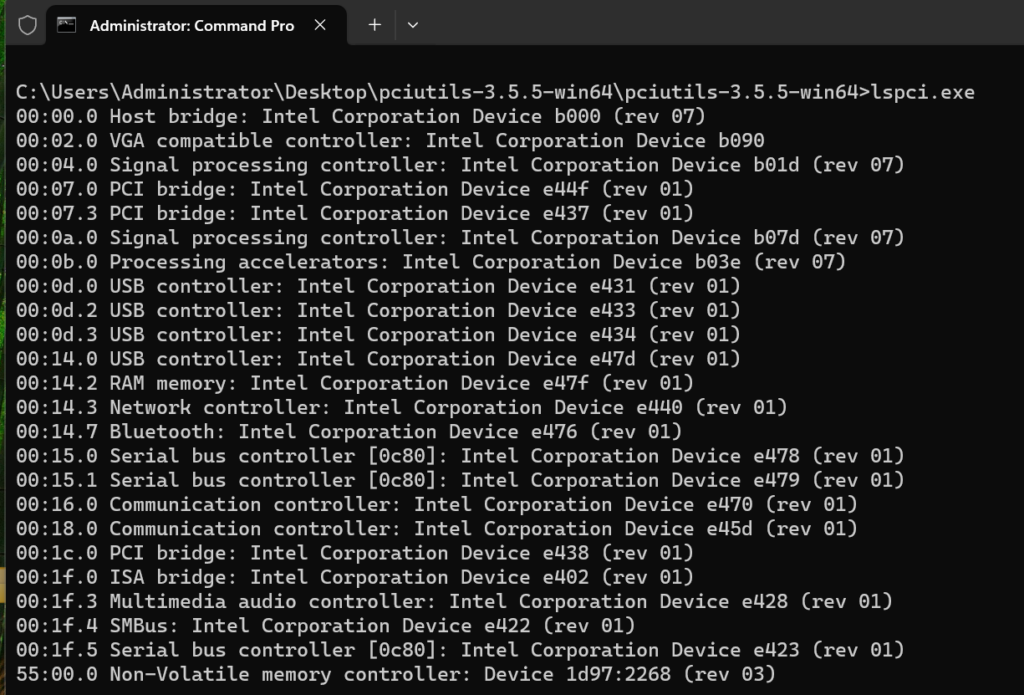
前一段时间,客户提出一个关于USB 千兆网卡的性能问题,为此我特地研究了网卡传输性能评估方法。正好最近听说WCH 推出了一款USB千兆网卡芯片:Ch398,于是申请样品进行简单的测试。这款产品和 Realtek 的 RTL8153 是Pin2Pin兼容的。
根据官网介绍,这款方案的特点如下:
和官方申请了一块Ch398开发板,上面的芯片远比我想象中要小,外围零件也非常少。

拿到手之后插入电脑即可使用,Win11已经内置了驱动无需额外安装,这点有点让我出乎预料。
接下来对这个网卡的传输性能通过简单的试验进行评估,测试环境是单网线双机互联,测试使用的是 Intel 最新一代平台 Panther Lake Ultra 325)。
一端设置了共享目录,其中使用工具生成了一个 100G 的文件从另外的机器进行访问。这是最简单的,不用第三方工具即可进行的测速方法。
下面是测试的视频可以看到传输速度能够始终维持在 110MB/S以上,同时芯片摸起来并不是特别烫。
下面是一个时长16分钟的视频,展示了完整的传输过程:
比较有意思的是,使用共享文件测试的网速会受到系统硬盘性能的影响,比如,视频后期可以从Task Manager中看到,因为硬盘占用率出现波动,传输速度也受到了影响。我猜测这是因为SSD的缓冲耗尽,所以前期硬盘工作正常,传输后期出现写入性能的下降。如果你在工作中遇到这样的问题,不妨考虑一下硬盘的因素。此外,传输速度的稳定性还可能受到 Power Mode 策略和CPU性能的影响。
使用 iperf3(官网 https://iperf.fr/)
第一步,在服务器端运行 iperf3.exe -s
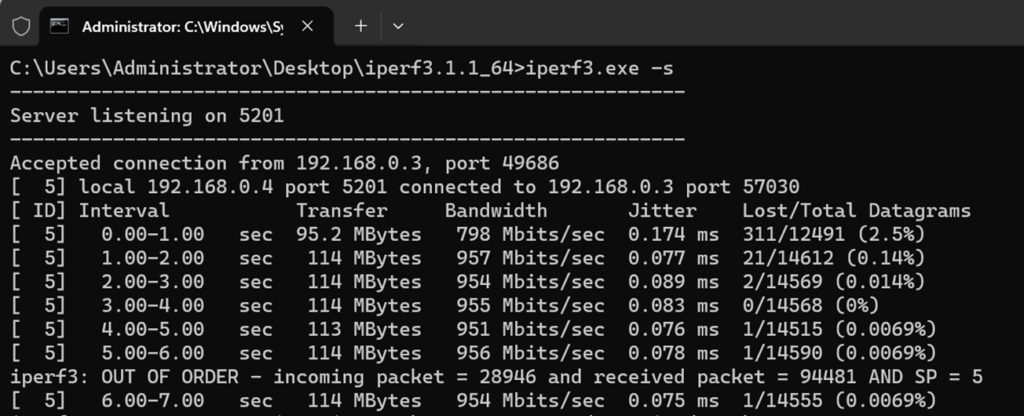
服务器端工作的截图
第二步,在被测机端运行 iperf3.exe -c 192.168.0.4 -b -1000m -u
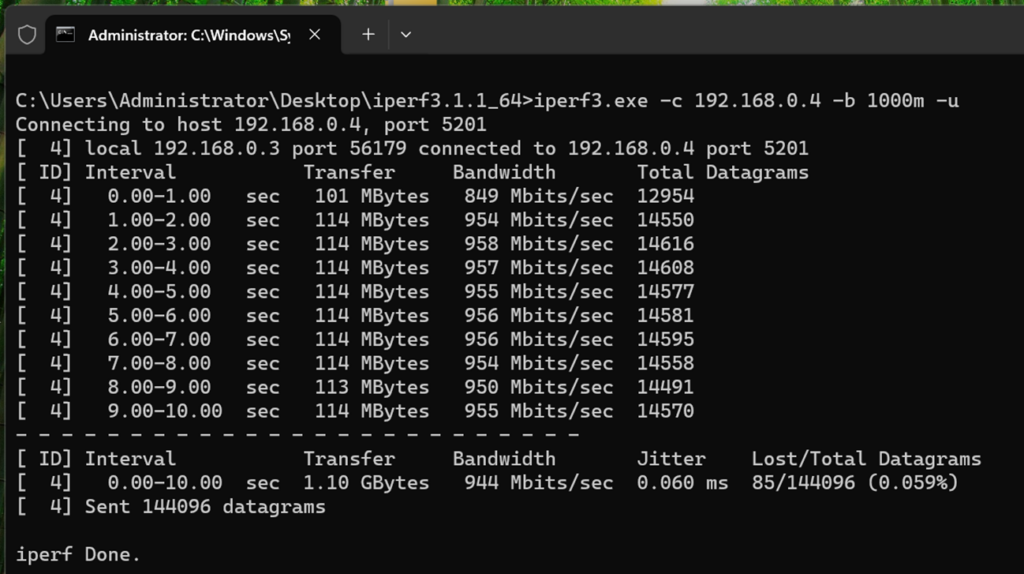
被测试机器端运行后的截图
通常测试中,第一个数据包并不能准确反映实际速度,这里可以通过 -O 1 参数强制忽略,例如:
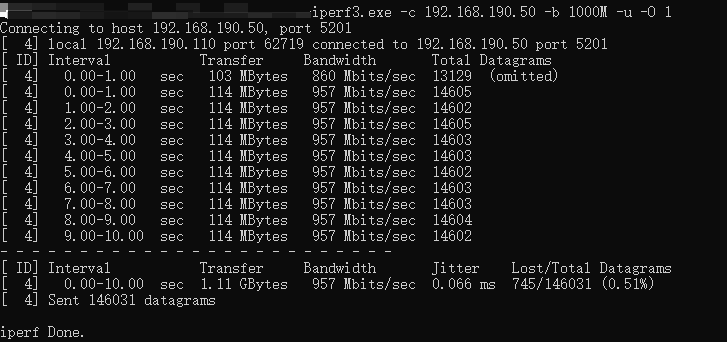
这里可以看到测试得到的速度会比之前的测试有所提升。
完整测试的工作视频如下:
可以看到,这种测试方法传输速度上比前面的共享文件会快一些,同时因为不依赖硬盘性能会使得测试更加单纯,同时这款软件能够生成简单的报告方便进一步评估。
作为对比,我同样测试了一下RTL8153性能,在Windows 文件共享拷贝环节,偶然会发生速度掉到900Mbps 下的情况,整体来看传输速度似乎对硬盘的性能更加依赖。
同样的使用 iperf 测试, RTL8153性能能够达到 Ch398 水平。
这个测试更加证明了Windows 共享拷贝文件测试网速,会受到网速之外的其他因素。如果有条件,尽量使用 iperf 进行测试。
这里可以看到 Ch398作为国产USB千兆网络方案,性能完全可以满足传输需求。此外,国产芯片更容易得到技术支持,双方在沟通上不会存在障碍,这也是选择国产芯片的充足理由。
如果在设计上有USB扩展千兆网络的需求,不妨考虑Ch398这款国产芯片。
很多时候,我们需要对 PDF 文件进行一些简单的处理,诸如:拆分合并加水印等等。通常情况下,在线的 PDF 工具已经足够应付。但是如果考虑到隐私保密和速度的问题,本地工具会更合适一些。
最近我有一个将扫描后的 PDF 合并的需求,最后使用了PDFtk 这个工具,网站是 https://www.pdflabs.com/tools/pdftk-the-pdf-toolkit/。
有兴趣的朋友可以试试。
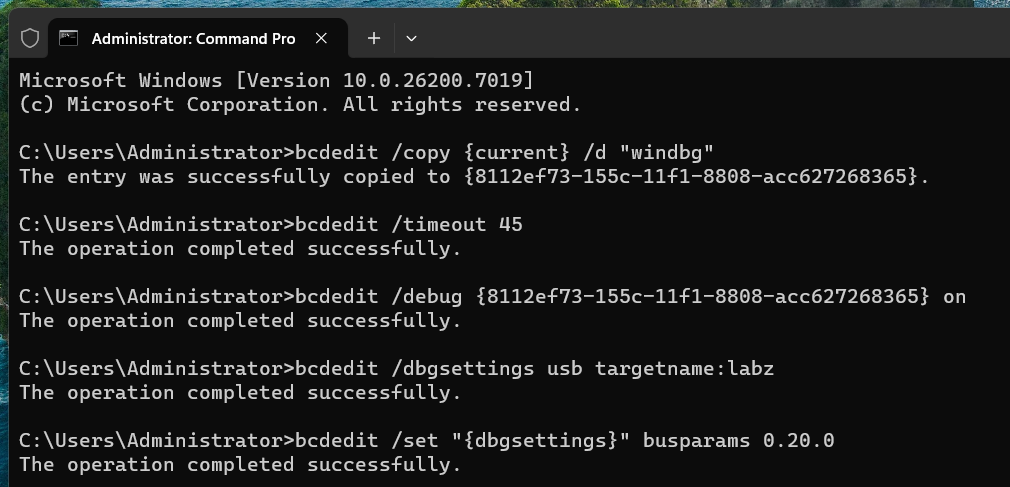
本文介绍通过 BCDEDIT 创建一个 Windows 启动选项,这个选项中打开 WinDBG 功能。
根据当前已有启动项拷贝出来一个名为 “WinDBG”的启动项, 这个命令运行之后会生成一个 GUID,需要记下来
bcdedit /copy {current} /d "windbg"
设置启动超时 45秒
bcdedit /timeout 45
设置打开 Debug 功能
bcdedit /debug {前面的 GUID} on
设置使用 USB Debug
bcedit /dbgsettings usb targetname:labz
指定 XHCI
bcdedit /set "{dbgssettings}" busparams 0.20.0
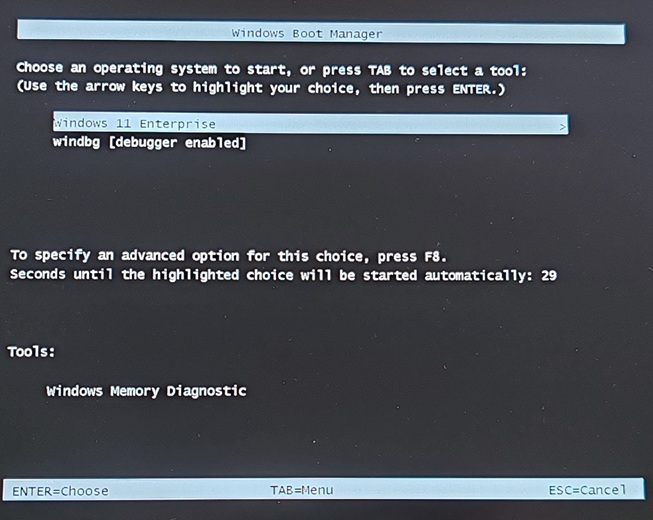
这样,每次启动的时候都会出现一个菜单,选择第一项会正常启动Windows,选择第二项即可启动能够通过 WinDBG 调试的 Windows
最近看到了一种奇怪的写法,例如下面的代码中:Print(L”%d “,i[segM]); 这个语句,实际上是Print(L”%d “,segM[i]) 的意思。
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/ShellCEntryLib.h>
UINT8 segM[]={
0xAA,0xBB,0xCC,0xDD,0xEE,0xFF
};
INTN
EFIAPI
ShellAppMain (
IN UINTN Argc,
IN CHAR16 **Argv
)
{
;
for (UINT8 i=0;i<6;i++) {
Print(L"%d ",i[segM]);
}
return(0);
}
解释说数组访问操作符 [] 是对称的,即:
a[b] == b[a]
当然了,我个人是非常不建议你在代码中使用上面的方法的。