#include <windows.h>
#include <iostream>
#include <cstdint>
#include <memory>
#include <stdio.h>
#include <stdlib.h>
#include "ok_jpg.h"
#pragma warning(disable:4996)
// 添加这行来链接必要的库
#pragma comment(lib, "msimg32.lib")
// 全局变量
HWND g_hWnd = NULL;
const wchar_t* CLASS_NAME = L"RGBAImageWindow";
// 图像数据结构
struct ImageData {
uint8_t* data;
int width;
int height;
int channels; // 4 for RGBA
};
ImageData g_imageData = { nullptr, 0, 0, 4 };
// 创建测试用的 RGBA 图像数据
void CreateTestRGBAImage() {
FILE* file = fopen("./my_image.jpg", "rb");
ok_jpg image = ok_jpg_read(file, OK_JPG_COLOR_FORMAT_RGBA);
fclose(file);
g_imageData.width = image.width;
g_imageData.height = image.height;
g_imageData.channels = 4;
g_imageData.data = image.data;
}
// 将 RGBA 数据转换为 Windows 位图并绘制
void DrawRGBAImage(HDC hdc, const ImageData& imageData, int destX, int destY, int destWidth, int destHeight) {
if (!imageData.data || imageData.width <= 0 || imageData.height <= 0) {
return;
}
// 创建 DIB (Device Independent Bitmap) 信息
BITMAPINFO bmi = {};
bmi.bmiHeader.biSize = sizeof(BITMAPINFOHEADER);
bmi.bmiHeader.biWidth = imageData.width;
bmi.bmiHeader.biHeight = -imageData.height; // 负值表示从上到下
bmi.bmiHeader.biPlanes = 1;
bmi.bmiHeader.biBitCount = 32; // RGBA = 32 bits
bmi.bmiHeader.biCompression = BI_RGB;
// 创建兼容的内存 DC
HDC memDC = CreateCompatibleDC(hdc);
void* pBits = nullptr;
HBITMAP hBitmap = CreateDIBSection(hdc, &bmi, DIB_RGB_COLORS, &pBits, NULL, 0);
if (hBitmap && pBits) {
// 将 RGBA 数据复制到位图 (注意:Windows 使用 BGRA 格式)
uint8_t* destData = static_cast<uint8_t*>(pBits);
for (int i = 0; i < imageData.width * imageData.height; i++) {
int srcIndex = i * 4;
int destIndex = i * 4;
destData[destIndex + 0] = imageData.data[srcIndex + 2]; // B
destData[destIndex + 1] = imageData.data[srcIndex + 1]; // G
destData[destIndex + 2] = imageData.data[srcIndex + 0]; // R
destData[destIndex + 3] = imageData.data[srcIndex + 3]; // A
}
// 选择位图到内存 DC
HBITMAP hOldBitmap = static_cast<HBITMAP>(SelectObject(memDC, hBitmap));
// 使用 AlphaBlend 支持透明度
BLENDFUNCTION blendFunc = {};
blendFunc.BlendOp = AC_SRC_OVER;
blendFunc.BlendFlags = 0;
blendFunc.SourceConstantAlpha = 255;
blendFunc.AlphaFormat = AC_SRC_ALPHA;
// 绘制到目标 DC,支持缩放
AlphaBlend(hdc, destX, destY, destWidth, destHeight,
memDC, 0, 0, imageData.width, imageData.height, blendFunc);
// 清理资源
SelectObject(memDC, hOldBitmap);
DeleteObject(hBitmap);
}
DeleteDC(memDC);
}
// 窗口过程函数
LRESULT CALLBACK WindowProc(HWND hwnd, UINT uMsg, WPARAM wParam, LPARAM lParam)
{
switch (uMsg)
{
case WM_PAINT:
{
PAINTSTRUCT ps;
HDC hdc = BeginPaint(hwnd, &ps);
// 获取窗口客户区大小
RECT rect;
GetClientRect(hwnd, &rect);
// 设置背景为黑色
FillRect(hdc, &rect, static_cast<HBRUSH>(GetStockObject(BLACK_BRUSH)));
// 绘制 RGBA 图像,居中显示
if (g_imageData.data) {
int windowWidth = rect.right - rect.left;
int windowHeight = rect.bottom - rect.top;
// 计算缩放比例以适应窗口
float scaleX = static_cast<float>(windowWidth) / g_imageData.width;
float scaleY = static_cast<float>(windowHeight) / g_imageData.height;
float scale = min(scaleX, scaleY) * 0.8f; // 留一些边距
int scaledWidth = static_cast<int>(g_imageData.width * scale);
int scaledHeight = static_cast<int>(g_imageData.height * scale);
int x = (windowWidth - scaledWidth) / 2;
int y = (windowHeight - scaledHeight) / 2;
DrawRGBAImage(hdc, g_imageData, x, y, scaledWidth, scaledHeight);
}
// 绘制信息文本
SetBkMode(hdc, TRANSPARENT);
SetTextColor(hdc, RGB(255, 255, 255));
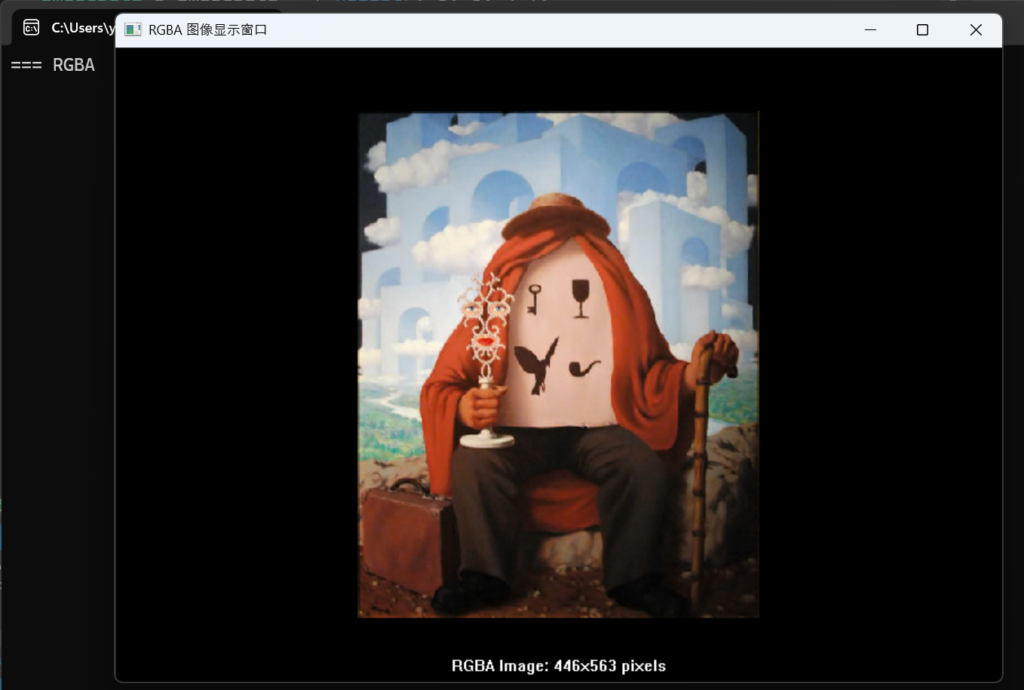
wchar_t info[256];
swprintf_s(info, L"RGBA Image: %dx%d pixels", g_imageData.width, g_imageData.height);
RECT textRect = rect;
textRect.top = rect.bottom - 30;
DrawText(hdc, info, -1, &textRect, DT_CENTER | DT_VCENTER | DT_SINGLELINE);
EndPaint(hwnd, &ps);
return 0;
}
case WM_KEYDOWN:
switch (wParam) {
case VK_ESCAPE:
PostMessage(hwnd, WM_CLOSE, 0, 0);
break;
case VK_SPACE:
// 空格键重新生成图像
if (g_imageData.data) {
delete[] g_imageData.data;
}
CreateTestRGBAImage();
InvalidateRect(hwnd, NULL, TRUE);
break;
}
return 0;
case WM_SIZE:
// 窗口大小改变时重绘
InvalidateRect(hwnd, NULL, TRUE);
return 0;
case WM_CLOSE:
DestroyWindow(hwnd);
return 0;
case WM_DESTROY:
// 清理图像数据
if (g_imageData.data) {
delete[] g_imageData.data;
g_imageData.data = nullptr;
}
PostQuitMessage(0);
return 0;
default:
return DefWindowProc(hwnd, uMsg, wParam, lParam);
}
}
// 注册窗口类
bool RegisterWindowClass()
{
WNDCLASS wc = {};
wc.lpfnWndProc = WindowProc;
wc.hInstance = GetModuleHandle(NULL);
wc.lpszClassName = CLASS_NAME;
wc.hbrBackground = static_cast<HBRUSH>(GetStockObject(BLACK_BRUSH));
wc.hCursor = LoadCursor(NULL, IDC_ARROW);
wc.hIcon = LoadIcon(NULL, IDI_APPLICATION);
return RegisterClass(&wc) != 0;
}
// 创建窗口
HWND CreateAppWindow()
{
return CreateWindowEx(
0,
CLASS_NAME,
L"RGBA 图像显示窗口",
WS_OVERLAPPEDWINDOW,
100, 100,
800, 600,
NULL, NULL,
GetModuleHandle(NULL),
NULL
);
}
// 消息循环
void MessageLoop()
{
MSG msg = {};
while (GetMessage(&msg, NULL, 0, 0))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
}
// 从外部数据加载 RGBA 图像的函数
void LoadRGBAImage(uint8_t* data, int width, int height) {
// 清理旧数据
if (g_imageData.data) {
delete[] g_imageData.data;
}
g_imageData.width = width;
g_imageData.height = height;
g_imageData.channels = 4;
// 复制数据
size_t dataSize = width * height * 4;
g_imageData.data = new uint8_t[dataSize];
memcpy(g_imageData.data, data, dataSize);
// 刷新窗口
if (g_hWnd) {
InvalidateRect(g_hWnd, NULL, TRUE);
}
}
int main()
{
SetConsoleOutputCP(CP_UTF8);
std::wcout << L"=== RGBA 图像显示程序 ===" << std::endl;
std::wcout << L"正在创建窗口..." << std::endl;
if (!RegisterWindowClass())
{
std::wcout << L"❌ 注册窗口类失败!" << std::endl;
system("pause");
return -1;
}
g_hWnd = CreateAppWindow();
if (g_hWnd == NULL)
{
std::wcout << L"❌ 创建窗口失败!" << std::endl;
system("pause");
return -1;
}
// 创建测试图像数据
CreateTestRGBAImage();
ShowWindow(g_hWnd, SW_SHOW);
UpdateWindow(g_hWnd);
std::wcout << L"✅ 窗口创建成功!" << std::endl;
std::wcout << L"💡 提示:" << std::endl;
std::wcout << L" - ESC 键退出程序" << std::endl;
std::wcout << L" - 空格键重新生成图像" << std::endl;
std::wcout << L" - 关闭窗口退出程序" << std::endl;
MessageLoop();
std::wcout << L"程序已退出。" << std::endl;
return 0;
}