一份是 Replacing VGA, GOP implementation for UEFI
另一份是 UEFI Driver Development Guide for Graphics Controller Device Classes
链接: https://pan.baidu.com/s/1kUPXGGZ 密码: urte
一份是 Replacing VGA, GOP implementation for UEFI
另一份是 UEFI Driver Development Guide for Graphics Controller Device Classes
链接: https://pan.baidu.com/s/1kUPXGGZ 密码: urte
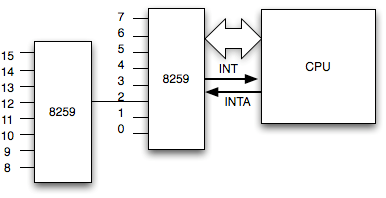
前面的实验已经证明:UEFI 架构本身只有一个中断,那就是时间中断,在实体机上测试显示使用的是 HPET 的时间中断。那么我们是否可以再给UEFI多加一个中断?答案是肯定的,只要硬件上有支持,我们就可以多加入一个中断。这次我们实验的就是 8254 上面的中断。8254 根据我的理解,就是一个能够发出脉冲的时间芯片。具体脉冲发出来了,还需要有一个中断芯片来管理这些中断,在 Leagcy 的X86中,这个工作是 8259 来完成的,下面就是各种微机原理都会展示的图片。因为中断比较多,所以需要2片来级联进行扩展。对于我们的想法来说,只要知道8254 是接在第一个(主,Master) 8259的Pin0 上(IRQ0)即可。
一直困扰我的问题是 IRQx对应在IDT 中的哪一个,直到最近看到了 EFI_LEGACY_8259_PROTOCOL 中的 GetVector 函数【参考1】:
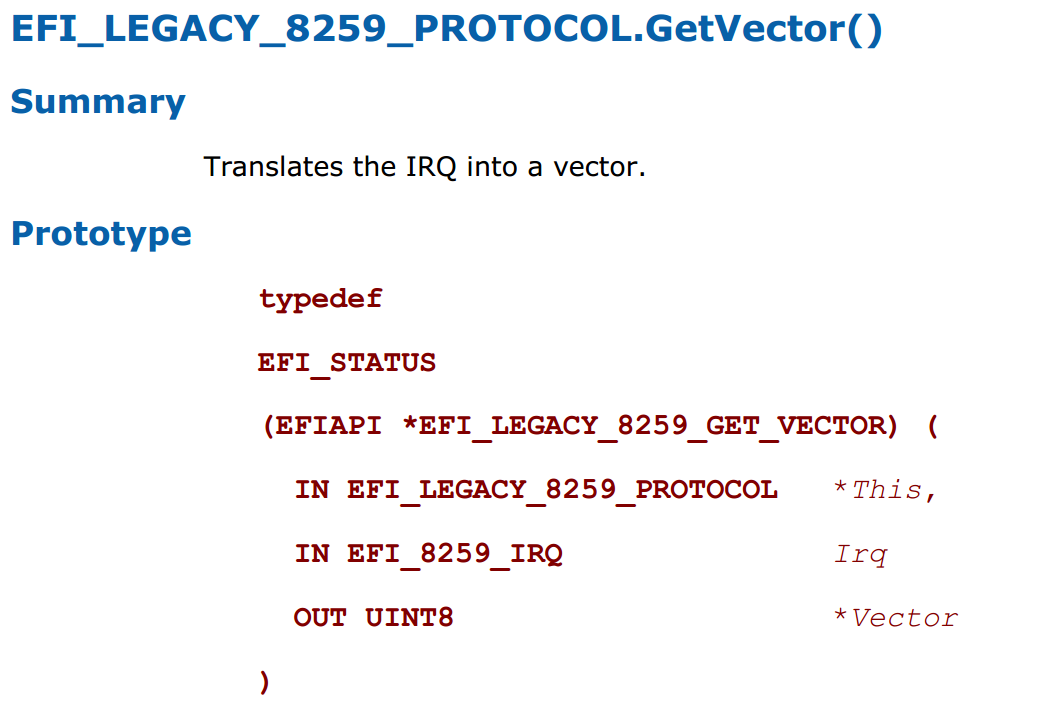
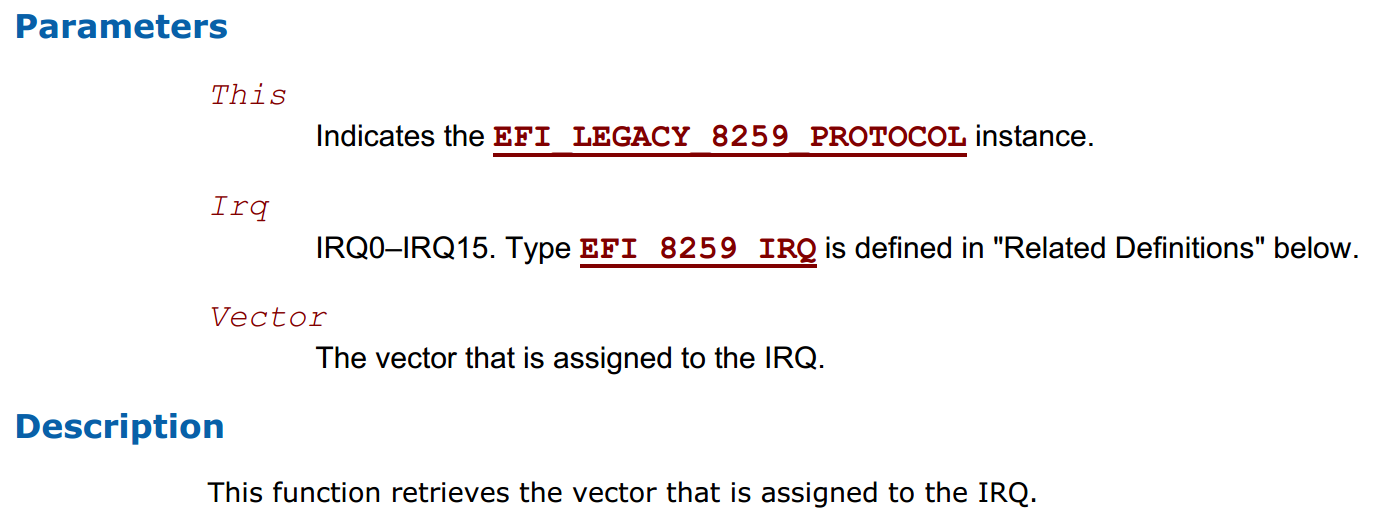
这个函数的作用就是返回当前IRQ 的Vector,也是就是IDT中的入口号。
了解了上面一些,就可以动手写程序了。使用我们之前的 PrintDriver3 的架构,使用 8259 的 Protocol来完成 8254 的初始化,设定 Interrupt 的Handler 是 MyInterruptHander,在这个函数中对 Var2 自增,最后使用之前的 PDT3 Application 打印 Var2 的数值。运行起来我们的Driver 之后,8254会不断发送中断出来,直观的说就是代码会运行到MyInterruptHander中,我们在这个函数中对于做标记的变量自增,最后用另外的 Protocol 找到这个变量并且打印出来。
完整代码如下:
/** @file
This driver produces Print9 protocol layered on top of the PrintLib from the MdePkg.
Copyright (c) 2009, Intel Corporation. All rights reserved.<BR>
This program and the accompanying materials
are licensed and made available under the terms and conditions of the BSD License
which accompanies this distribution. The full text of the license may be found at
http://opensource.org/licenses/bsd-license.php
THE PROGRAM IS DISTRIBUTED UNDER THE BSD LICENSE ON AN "AS IS" BASIS,
WITHOUT WARRANTIES OR REPRESENTATIONS OF ANY KIND, EITHER EXPRESS OR IMPLIED.
**/
#include <PiDxe.h>
#include <Library/UefiLib.h>
#include <Library/PrintLib.h>
#include <Library/UefiBootServicesTableLib.h>
#include <Library/DebugLib.h>
#include <Library/UefiDriverEntryPoint.h>
#include <Library/MemoryAllocationLib.h>
#include "Print9.h"
#include <Library/IoLib.h>
#include <Protocol/Cpu.h>
#include <Library/CpuLib.h>
#include "Legacy8259.h"
extern EFI_SYSTEM_TABLE *gST;
EFI_GUID gEfiPrint9ProtocolGuid =
{ 0xf05976ef, 0x83f1, 0x4f3d,
{ 0x86, 0x19, 0xf7, 0x59,0x5d, 0x41, 0xe5, 0x61 } };
EFI_GUID gEfiCpuArchProtocolGuid =
{ 0x26BACCB1, 0x6F42, 0x11D4,
{ 0xBC, 0xE7, 0x00, 0x80, 0xC7, 0x3C, 0x88, 0x81 }};
// Include/Protocol/Legacy8259.h
EFI_GUID gEfiLegacy8259ProtocolGuid =
{ 0x38321dba, 0x4fe0, 0x4e17,
{ 0x8a, 0xec, 0x41, 0x30, 0x55, 0xea, 0xed, 0xc1 }};
//\PcAtChipsetPkg\8254TimerDxe\Timer.h
//
// The maximum tick duration for 8254 timer
//
#define MAX_TIMER_TICK_DURATION 549254
//
// The default timer tick duration is set to 10 ms = 100000 100 ns units
//
#define DEFAULT_TIMER_TICK_DURATION 100000
#define TIMER_CONTROL_PORT 0x43
#define TIMER0_COUNT_PORT 0x40
//
// The current period of the timer interrupt
//
volatile UINT64 mTimerPeriod = 0;
EFI_PRINT9_PRIVATE_DATA *Image;
EFI_HANDLE mPrintThunkHandle = NULL;
//
// Pointer to the Legacy 8259 Protocol instance
//
EFI_LEGACY_8259_PROTOCOL *mLegacy8259;
//Copied from \MdeModulePkg\Library\DxePrintLibPrint2Protocol\PrintLib.c
UINTN
EFIAPI
MyPrint ()
{
CHAR16 *Buffer=L"1 2 3 4 5 6 7 8 9 0 A B C E D F ";
UnicodeSPrint(Buffer,16,L"%d\r\n",Image->Var2);
gST->ConOut->OutputString(gST->ConOut,Buffer);
return 0;
}
//
// Worker Functions
//
/**
Sets the counter value for Timer #0 in a legacy 8254 timer.
@param Count The 16-bit counter value to program into Timer #0 of the legacy 8254 timer.
**/
VOID
SetPitCount (
IN UINT16 Count
)
{
IoWrite8 (TIMER_CONTROL_PORT, 0x36);
IoWrite8 (TIMER0_COUNT_PORT, (UINT8)(Count & 0xff));
IoWrite8 (TIMER0_COUNT_PORT, (UINT8)((Count >> 8) & 0xff));
}
/**
This function adjusts the period of timer interrupts to the value specified
by TimerPeriod. If the timer period is updated, then the selected timer
period is stored in EFI_TIMER.TimerPeriod, and EFI_SUCCESS is returned. If
the timer hardware is not programmable, then EFI_UNSUPPORTED is returned.
If an error occurs while attempting to update the timer period, then the
timer hardware will be put back in its state prior to this call, and
EFI_DEVICE_ERROR is returned. If TimerPeriod is 0, then the timer interrupt
is disabled. This is not the same as disabling the CPU's interrupts.
Instead, it must either turn off the timer hardware, or it must adjust the
interrupt controller so that a CPU interrupt is not generated when the timer
interrupt fires.
@param This The EFI_TIMER_ARCH_PROTOCOL instance.
@param TimerPeriod The rate to program the timer interrupt in 100 nS units. If
the timer hardware is not programmable, then EFI_UNSUPPORTED is
returned. If the timer is programmable, then the timer period
will be rounded up to the nearest timer period that is supported
by the timer hardware. If TimerPeriod is set to 0, then the
timer interrupts will be disabled.
@retval EFI_SUCCESS The timer period was changed.
@retval EFI_UNSUPPORTED The platform cannot change the period of the timer interrupt.
@retval EFI_DEVICE_ERROR The timer period could not be changed due to a device error.
**/
EFI_STATUS
EFIAPI
TimerDriverSetTimerPeriod (
IN UINT64 TimerPeriod
)
{
UINT64 TimerCount;
//
// The basic clock is 1.19318 MHz or 0.119318 ticks per 100 ns.
// TimerPeriod * 0.119318 = 8254 timer divisor. Using integer arithmetic
// TimerCount = (TimerPeriod * 119318)/1000000.
//
// Round up to next highest integer. This guarantees that the timer is
// equal to or slightly longer than the requested time.
// TimerCount = ((TimerPeriod * 119318) + 500000)/1000000
//
// Note that a TimerCount of 0 is equivalent to a count of 65,536
//
// Since TimerCount is limited to 16 bits for IA32, TimerPeriod is limited
// to 20 bits.
//
if (TimerPeriod == 0) {
//
// Disable timer interrupt for a TimerPeriod of 0
//
mLegacy8259->DisableIrq (mLegacy8259, Efi8259Irq0);
} else {
//
// Convert TimerPeriod into 8254 counts
//
TimerCount = DivU64x32 (MultU64x32 (119318, (UINT32) TimerPeriod) + 500000, 1000000);
//
// Check for overflow
//
if (TimerCount >= 65536) {
TimerCount = 0;
TimerPeriod = MAX_TIMER_TICK_DURATION;
}
//
// Program the 8254 timer with the new count value
//
SetPitCount ((UINT16) TimerCount);
//
// Enable timer interrupt
//
mLegacy8259->EnableIrq (mLegacy8259, Efi8259Irq0, FALSE);
}
//
// Save the new timer period
//
mTimerPeriod = TimerPeriod;
return EFI_SUCCESS;
}
VOID
EFIAPI
MyInterruptHandler (
IN EFI_EXCEPTION_TYPE InterruptType,
IN EFI_SYSTEM_CONTEXT SystemContext
)
{
EFI_TPL OriginalTPL;
OriginalTPL = gBS->RaiseTPL (TPL_HIGH_LEVEL);
mLegacy8259->EndOfInterrupt (mLegacy8259, Efi8259Irq0);
Image->Var2++;
gBS->RestoreTPL (OriginalTPL);
}
/**
The user Entry Point for Print module.
This is the entry point for Print DXE Driver. It installs the Print2 Protocol.
@param[in] ImageHandle The firmware allocated handle for the EFI image.
@param[in] SystemTable A pointer to the EFI System Table.
@retval EFI_SUCCESS The entry point is executed successfully.
@retval Others Some error occurs when executing this entry point.
**/
EFI_STATUS
EFIAPI
PrintEntryPoint (
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
)
{
EFI_STATUS Status;
EFI_CPU_ARCH_PROTOCOL *mCpu;
UINT32 TimerVector;
//
// Allocate a new image structure
//
Image = AllocateZeroPool (sizeof(EFI_PRINT9_PRIVATE_DATA));
if (Image == NULL) {
Status = EFI_OUT_OF_RESOURCES;
ASSERT_EFI_ERROR (Status);
}
Image->Signature = PRINT9_PRIVATE_DATA_SIGNATURE;
Image->PRINT9.UnicodeBSPrint=UnicodeBSPrint;
Image->PRINT9.UnicodeSPrint=UnicodeSPrint;
Image->PRINT9.UnicodeBSPrintAsciiFormat=UnicodeBSPrintAsciiFormat;
Image->PRINT9.UnicodeSPrintAsciiFormat=MyPrint;
//Image->PRINT9.UnicodeValueToString=UnicodeValueToString;
Image->PRINT9.AsciiBSPrint=AsciiBSPrint;
Image->PRINT9.AsciiSPrint=AsciiSPrint;
Image->PRINT9.AsciiBSPrintUnicodeFormat=AsciiBSPrintUnicodeFormat;
Image->PRINT9.AsciiSPrintUnicodeFormat=AsciiSPrintUnicodeFormat;
//Image->PRINT9.AsciiValueToString=AsciiValueToString;
Image->Var2=1984;
Status = gBS->InstallMultipleProtocolInterfaces (
&mPrintThunkHandle,
&gEfiPrint9ProtocolGuid,
&Image->PRINT9,
NULL
);
ASSERT_EFI_ERROR (Status);
//
// Locate the Cpu Arch Protocol.
//
Status = gBS->LocateProtocol (&gEfiCpuArchProtocolGuid, NULL, &mCpu);
ASSERT_EFI_ERROR (Status);
//
// Find the Legacy8259 protocol.
//
Status = gBS->LocateProtocol (&gEfiLegacy8259ProtocolGuid, NULL, (VOID **) &mLegacy8259);
ASSERT_EFI_ERROR (Status);
//
// Force the timer to be disabled
//
Status = TimerDriverSetTimerPeriod (0);
ASSERT_EFI_ERROR (Status);
//
// Get the interrupt vector number corresponding to IRQ0 from the 8259 driver
//
TimerVector = 0;
Status = mLegacy8259->GetVector (mLegacy8259, Efi8259Irq0, (UINT8 *) &TimerVector);
ASSERT_EFI_ERROR (Status);
//
// Install interrupt handler for 8254 Timer #0 (ISA IRQ0)
//
Status = mCpu->RegisterInterruptHandler (mCpu, TimerVector, MyInterruptHandler);
ASSERT_EFI_ERROR (Status);
//
// Force the timer to be enabled at its default period
//
Status = TimerDriverSetTimerPeriod (DEFAULT_TIMER_TICK_DURATION);
ASSERT_EFI_ERROR (Status);
return Status;
}
运行结果(实体机):
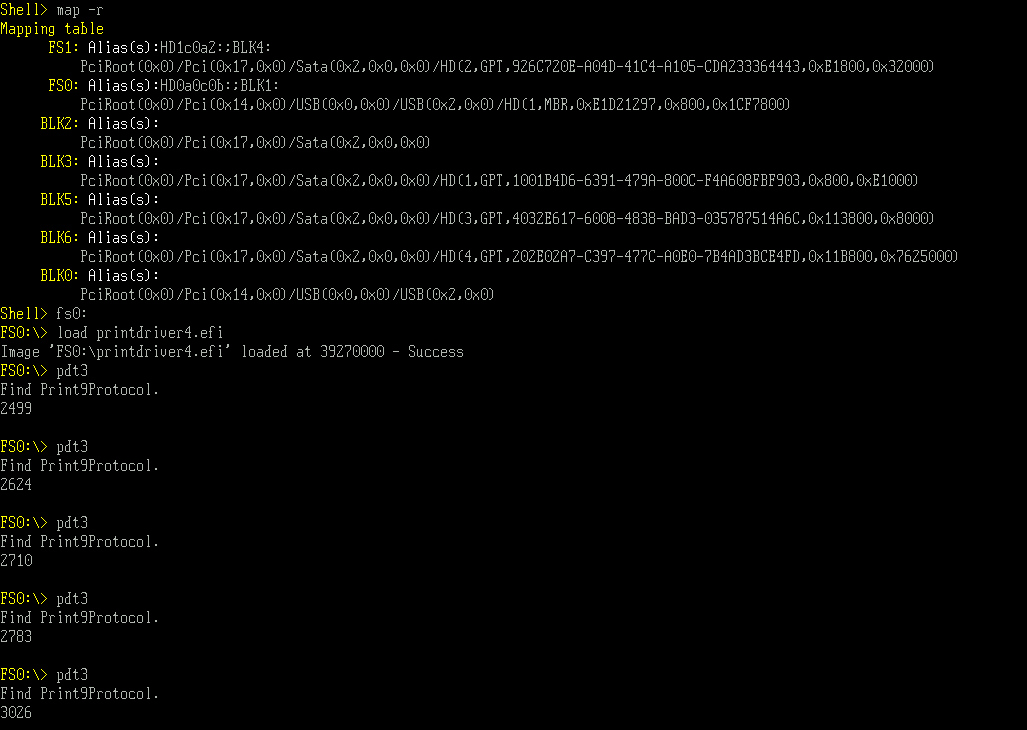
从运行结果来看,代码中设定的定时器能够正常工作和我们的预期一致。
8254初始化部分代码拷贝自 8254TimerDxe\Timer.c ,很多具体操作的含义并不清楚,有兴趣的朋友可以找一本《微机原理》的书籍对照研究一下。X86架构依然兼容很久之前的 8254、8259的设计。这样的兼容性既是X86的优点,保证了过去的代码依然能够运行;同时也是X86沉重的历史包袱,而后面这一点更加是BIOS存在的意义。
EFI (X64)下载
printdriver4
源代码
PrintDriver4SRC
参考:
1. Intel® Platform Innovation Framework for UEFI Compatibility Support Module Specification
正经的 Arduino Leonardo 上面有四个LED(DFrobot 的Leonardo&XBEE V1.2 上面有5个LED)。长得是下面这个样子:
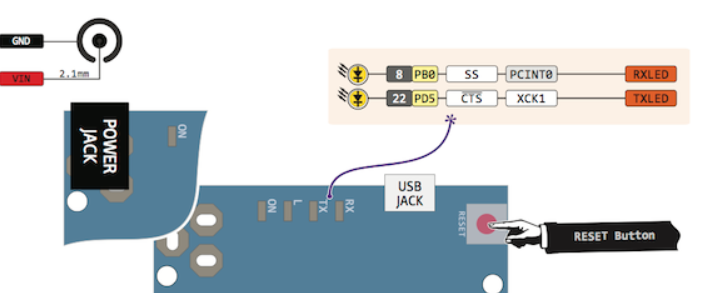
对照电路图 LED 连接如下:
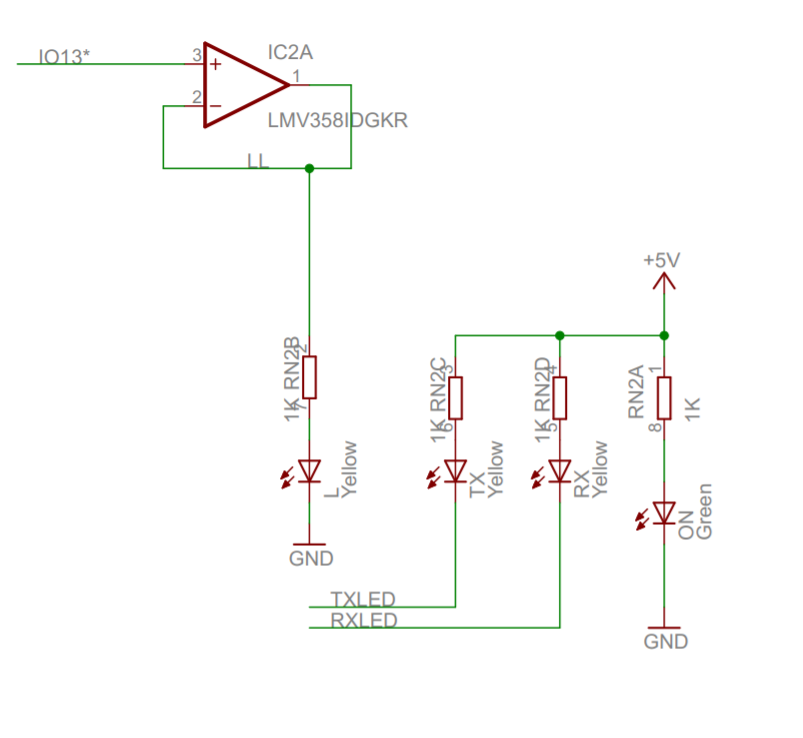
LED 控制Pin 说明
L D13 (PC7) GPIO 控制
TX PD5 USB发送数据亮
RX PB0 USB接收数据亮
ON 5V 上电就亮
初始化在 \arduino-1.8.4\hardware\arduino\avr\cores\arduino\USBCore.cpp 有定义
void USBDevice_::attach()
{
_usbConfiguration = 0;
_usbCurrentStatus = 0;
_usbSuspendState = 0;
USB_ClockEnable();
UDINT &= ~((1<<WAKEUPI) | (1<<SUSPI)); // clear already pending WAKEUP / SUSPEND requests
UDIEN = (1<<EORSTE) | (1<<SOFE) | (1<<SUSPE); // Enable interrupts for EOR (End of Reset), SOF (start of frame) and SUSPEND
TX_RX_LED_INIT;
#if MAGIC_KEY_POS != (RAMEND-1)
if (pgm_read_word(FLASHEND - 1) == NEW_LUFA_SIGNATURE) {
_updatedLUFAbootloader = true;
}
#endif
}
其中的 一些宏定义在 \arduino-1.8.4\hardware\arduino\avr\variants\leonardo\pins_arduino.h
#define TX_RX_LED_INIT DDRD |= (1<<5), DDRB |= (1<<0) #define TXLED0 PORTD |= (1<<5) #define TXLED1 PORTD &= ~(1<<5) #define RXLED0 PORTB |= (1<<0) #define RXLED1 PORTB &= ~(1<<0)
Tx/Rx 的作用是用来指示传输,而实际上传输是一下就发生和结束的,因此,设计上使用了一个延时
/** Pulse generation counters to keep track of the number of milliseconds remaining for each pulse type */ #define TX_RX_LED_PULSE_MS 100 volatile u8 TxLEDPulse; /**< Milliseconds remaining for data Tx LED pulse */ volatile u8 RxLEDPulse; /**< Milliseconds remaining for data Rx LED pulse */
当收到数据时,就Enable Led,同时重置计时器
static inline void Recv(volatile u8* data, u8 count)
{
while (count--)
*data++ = UEDATX;
RXLED1; // light the RX LED
RxLEDPulse = TX_RX_LED_PULSE_MS;
}
static inline u8 Recv8()
{
RXLED1; // light the RX LED
RxLEDPulse = TX_RX_LED_PULSE_MS;
return UEDATX;
}
在每一个 SOF 的时候检查LED
// Start of Frame - happens every millisecond so we use it for TX and RX LED one-shot timing, too
if (udint & (1<<SOFI))
{
USB_Flush(CDC_TX); // Send a tx frame if found
// check whether the one-shot period has elapsed. if so, turn off the LED
if (TxLEDPulse && !(--TxLEDPulse))
TXLED0;
if (RxLEDPulse && !(--RxLEDPulse))
RXLED0;
}
例子:
arduino-1.8.4\hardware\arduino\avr\variants\leonardo\pins_arduino.h
#define NUM_DIGITAL_PINS 31
#define NUM_ANALOG_INPUTS 12
/*
#define TX_RX_LED_INIT DDRD |= (1<<5), DDRB |= (1<<0)
#define TXLED0 PORTD |= (1<<5)
#define TXLED1 PORTD &= ~(1<<5)
#define RXLED0 PORTB |= (1<<0)
#define RXLED1 PORTB &= ~(1<<0)
*/
//labz_Start
#define TX_RX_LED_INIT DDRD |= (1<<5), DDRB |= (1<<0),DDRF = 0x81
#define TXLED0 PORTD |= (1<<5);PORTF &= ~ 0x01
#define TXLED1 PORTD &= ~(1<<5);PORTF |= 0x01
#define RXLED0 PORTB |= (1<<0);PORTF &= ~ 0x80
#define RXLED1 PORTB &= ~(1<<0);PORTF |= 0x80
// labz _End
#define PIN_WIRE_SDA (2)
#define PIN_WIRE_SCL (3)
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
while (Serial.available())
{ byte c=Serial.read();
Serial.write(c);
}
}
参考:
1.Leonardo 电路图
https://www.arduino.cc/en/uploads/Main/arduino-leonardo-schematic_3b.pdf
2.引脚关系
http://www.zembedded.com/wp-content/uploads/2013/04/Ardunio_leonardo.png
前面提到了 EFI_CPU_ARCH_PROTOCOL ,这次试试这个Protocol的 EnableInterrput 和 DisableInterrupt。
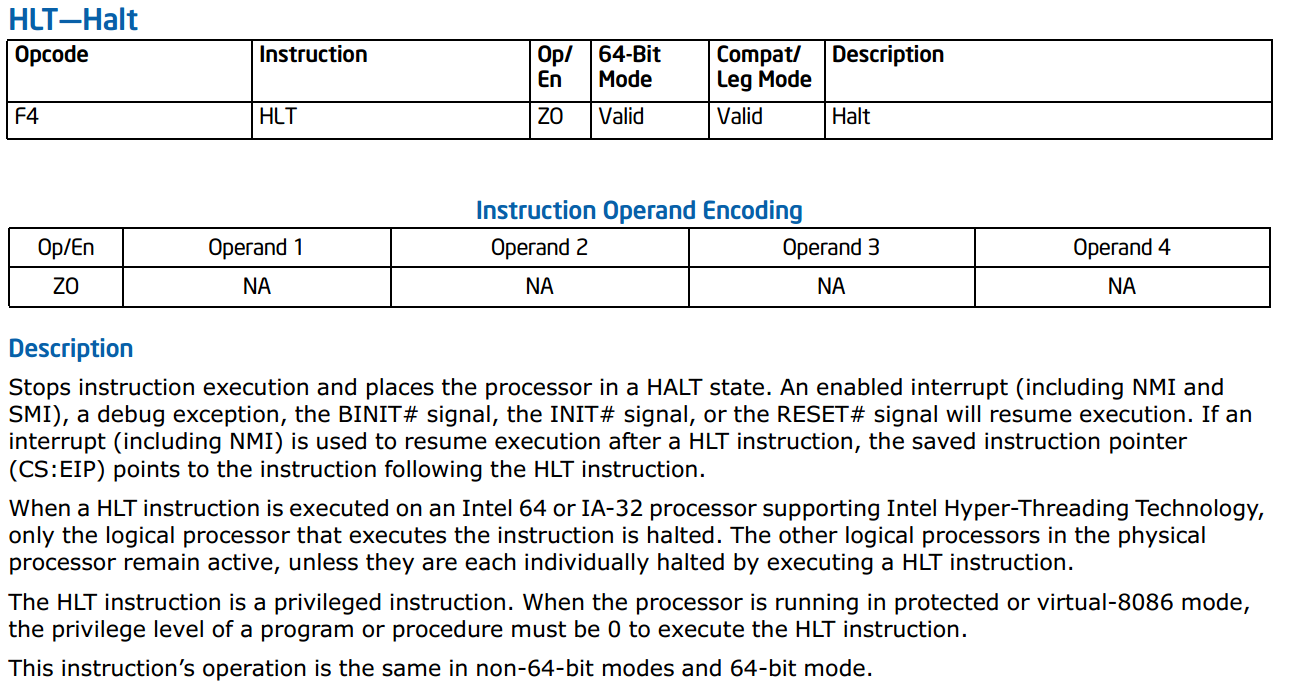
实验的方法是使用 CpuSleep() 这个函数,在 \UDK2017\MdePkg\Library\BaseCpuLib\X64\CpuSleep.asm 中可以看到具体实现:
.code
;------------------------------------------------------------------------------
; VOID
; EFIAPI
; CpuSleep (
; VOID
; );
;------------------------------------------------------------------------------
CpuSleep PROC
hlt
ret
CpuSleep ENDP
END
就是说他调用了 hlt 这个指令,这个指令的介绍如下,执行这个指令后 CPU 会停机,只有中断才能唤醒CPU。我们在这个函数之后再编写输出字符串的代码,如果能看到就说明CPU被中断唤醒了(更简单的判断:没唤醒就会死机)。
最终的代码如下:
/** @file
A simple, basic, application showing how the Hello application could be
built using the "Standard C Libraries" from StdLib.
Copyright (c) 2010 - 2011, Intel Corporation. All rights reserved.<BR>
This program and the accompanying materials
are licensed and made available under the terms and conditions of the BSD License
which accompanies this distribution. The full text of the license may be found at
http://opensource.org/licenses/bsd-license.
THE PROGRAM IS DISTRIBUTED UNDER THE BSD LICENSE ON AN "AS IS" BASIS,
WITHOUT WARRANTIES OR REPRESENTATIONS OF ANY KIND, EITHER EXPRESS OR IMPLIED.
**/
#include <Library/BaseLib.h>
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/PrintLib.h>
#include <Library/ShellCEntryLib.h>
#include <Protocol/Cpu.h>
#include <Library/CpuLib.h>
EFI_GUID gEfiCpuArchProtocolGuid =
{ 0x26BACCB1, 0x6F42, 0x11D4,
{ 0xBC, 0xE7, 0x00, 0x80, 0xC7, 0x3C, 0x88, 0x81 }};
extern EFI_BOOT_SERVICES *gBS;
/***
Demonstrates basic workings of the main() function by displaying a
welcoming message.
Note that the UEFI command line is composed of 16-bit UCS2 wide characters.
The easiest way to access the command line parameters is to cast Argv as:
wchar_t **wArgv = (wchar_t **)Argv;
@param[in] Argc Number of argument tokens pointed to by Argv.
@param[in] Argv Array of Argc pointers to command line tokens.
@retval 0 The application exited normally.
@retval Other An error occurred.
***/
int
main (
IN int Argc,
IN char **Argv
)
{
EFI_CPU_ARCH_PROTOCOL *Cpu;
EFI_STATUS Status;
//
// Locate the Cpu Arch Protocol.
//
Status = gBS->LocateProtocol (&gEfiCpuArchProtocolGuid, NULL, &Cpu);
if (EFI_ERROR (Status)) {
Print(L"Can't find EFI_CPU_ARCH_PROTOCOL\n");
return Status;
}
Print(L"Running CpuSleep\n");
CpuSleep();
Print(L"CpuSleep Exit\n");
Print(L"Disable CPU interrupt by EFI_CPU_ARCH_PROTOCOL\n");
Cpu->DisableInterrupt(Cpu);
Print(L"Running CpuSleep\n");
CpuSleep();
Print(L"CpuSleep Exit\n");
Print(L"Disable CPU interrupt by CLI\n");
Print(L"Running CpuSleep\n");
DisableInterrupts();
CpuSleep();
EnableInterrupts();
Print(L"CpuSleep Exit\n");
return 0;
}
运行结果如下(这是在实体机运行的结果):
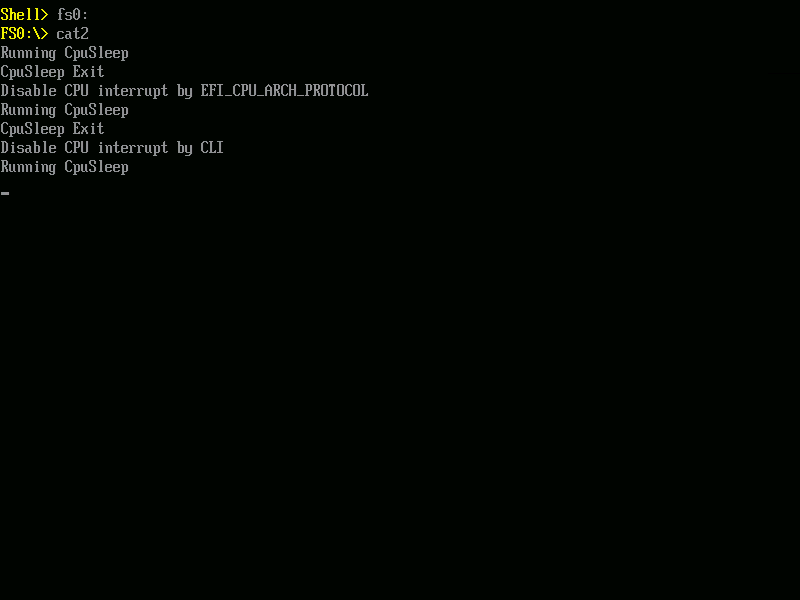
代码中调用了 CpuSleep 函数三次,第一次应该是被UEFI 中的Timer唤醒了,所以运行一下就出来了;第二次调用 CpuSleep函数之前,先用EFI_CPU_ARCH_PROTOCOL 的 DisableInterrupt,但是并没有作用;第三次,我们用CLI 指令关闭所有的中断,于是,程序停下来了,也死机了。
完整的代码下载:
结论: 保险起见,如果你想 Disable Interrupt,那么请使用 cli 这样的指令。后面有空再探究一下为什么这两个函数没有效果。
Windows App Store 中推出了新版的 WinDBG,功能上应该和 WDK之类的相同,界面变化很大。
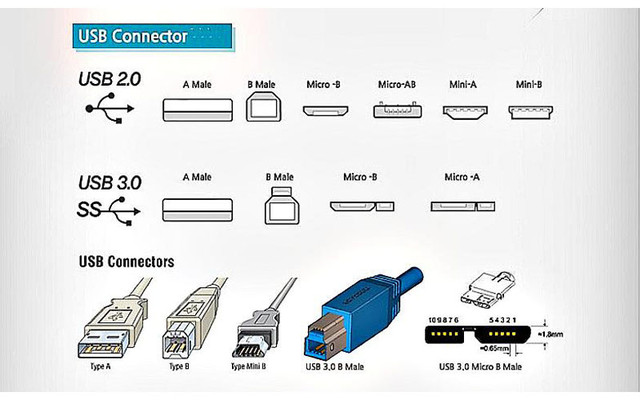
首先用 WinDBG USB 3.0 线将Host(控制端,运行 WinDBG)和Slave(被控制端)连接起来;和之前 USB2.0 的Debug完全不同,Slave上任何一个USB3.0端口都可以,不需要特别查找 Debug Port 。
下图为 Intel Kabylake HDK 平台
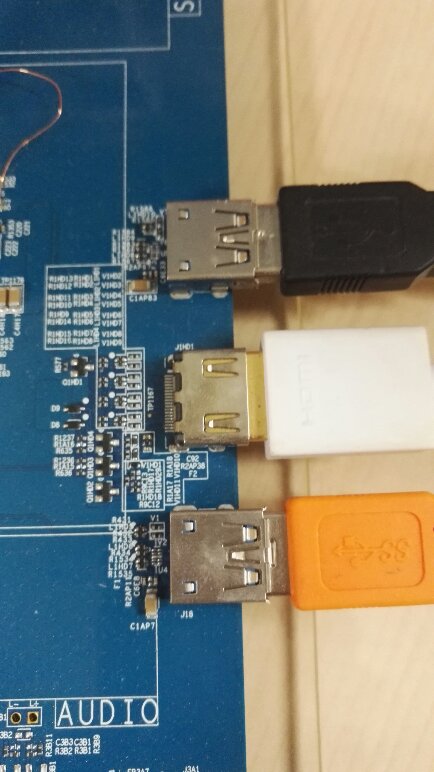
下图为我使用的笔记本工作机

之后,需要在 Slave 上MSCONFIG里面做一些设置:
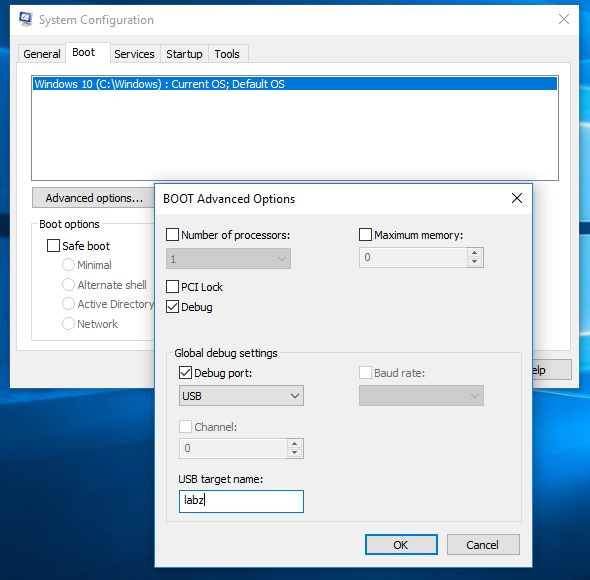
USB target name 设定为 labz,后面 WinDBG的设置也会使用到。设置之后,Slave会要求重启。
启动Host上面的 WinDBG,使用搜索功能,找到长这样的(一个系统中可以安装多个版本的 WinDBG)
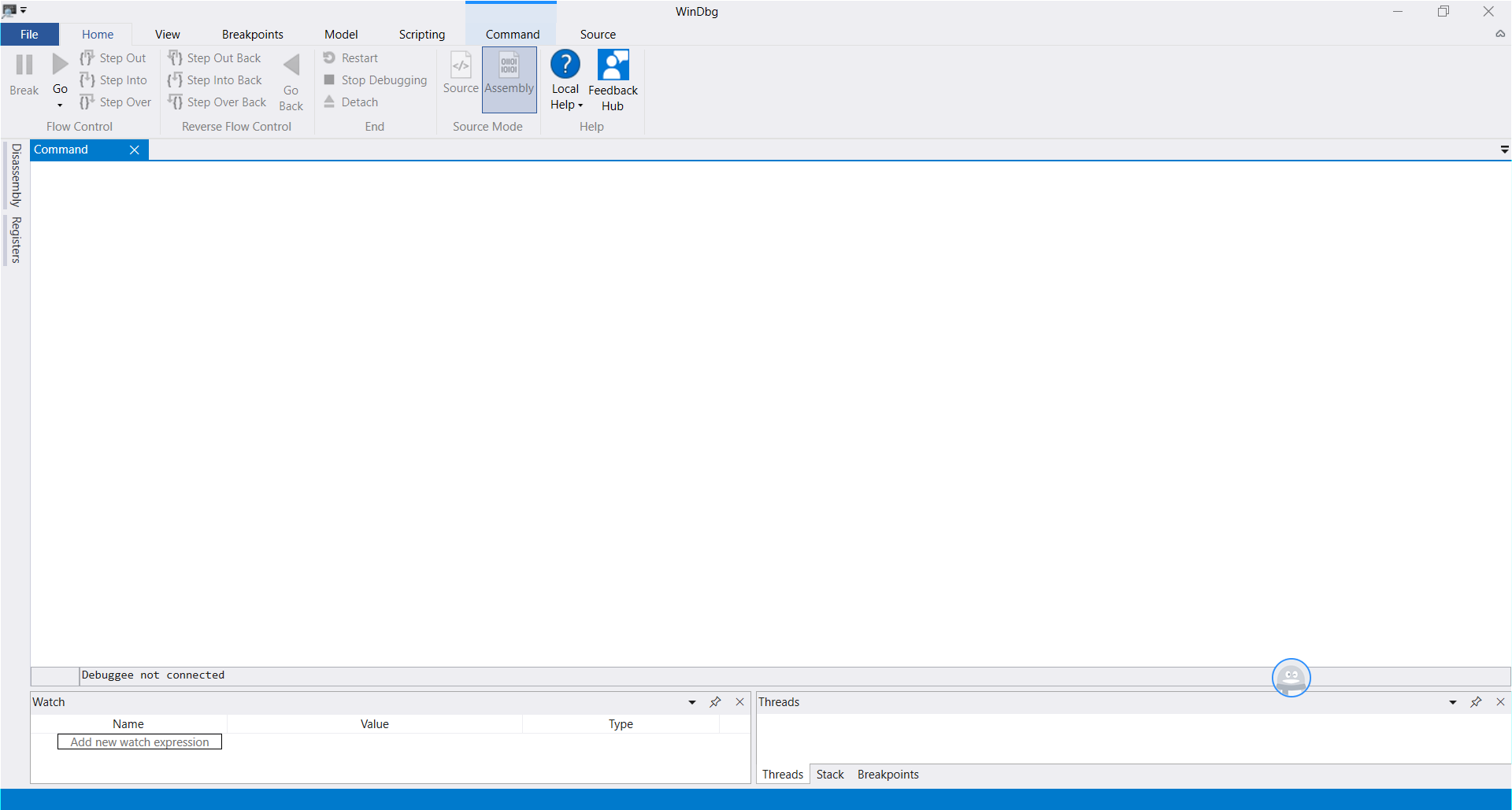
界面和之前相比变化很大,看起来没有那么死板了
在 File 中连接的选项,选择 Attach to kernel, USB 页面Target Name 填写上 labz
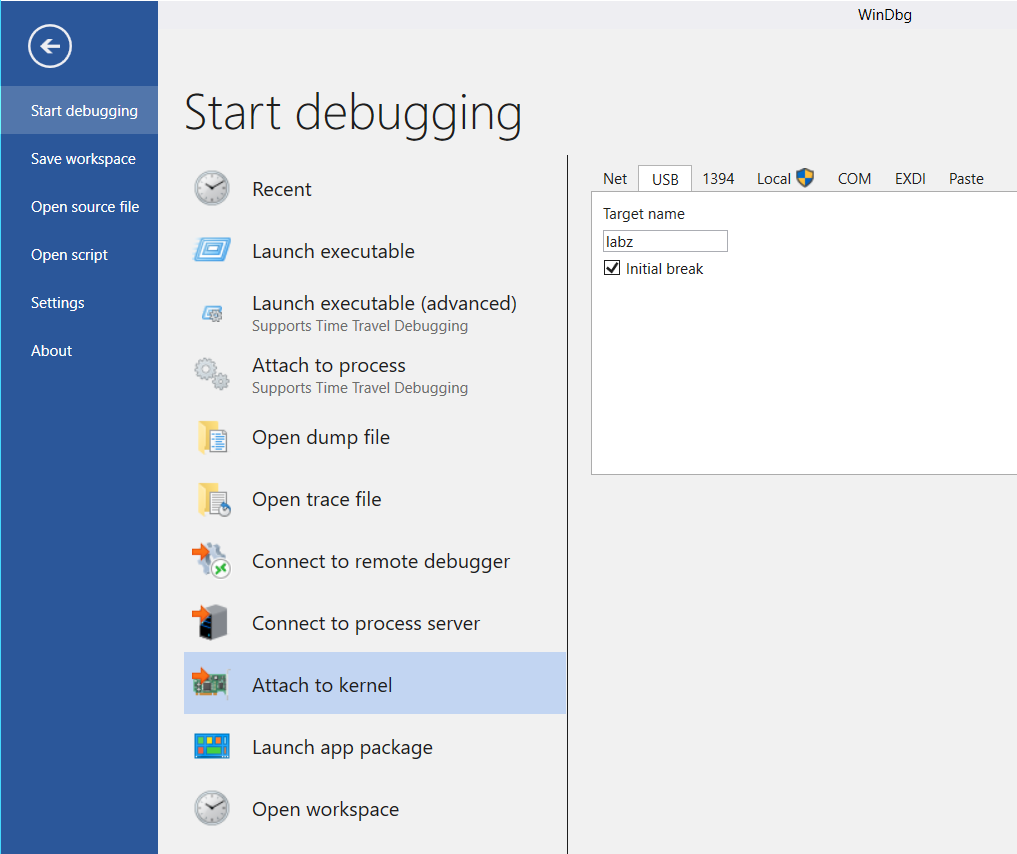
点击OK按钮之后,HOST和SLAVE即连接起来了
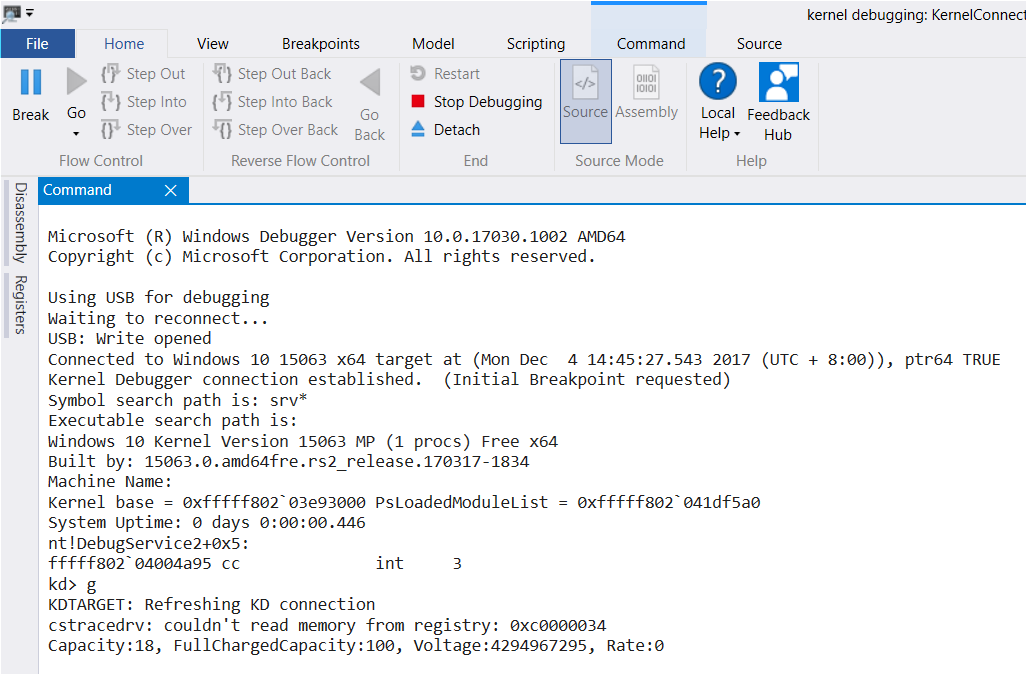
使用 Break 按钮可以停下来
如果发现无法连接,请检查 HOST 的设备管理器 USB Debug Connection Device设备是否有Yellow Bang。 我遇到了这样的情况,显示的错误信息是驱动未签名
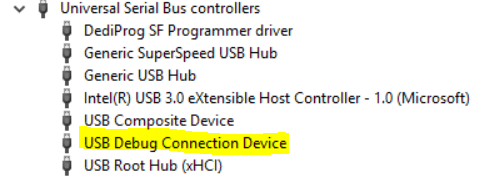
例如:
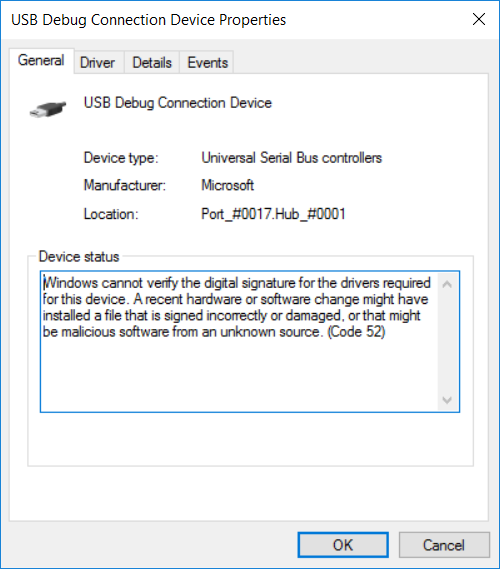
解决方法是:找一个有签名的驱动安装一下。这里放一个我目前在用的,可以试试看
2025年5月 更新一个我这边可以用的驱动 下载
====================================================
20201124 最近开始使用 WinDBG 惊奇的发现又出现了上面提到的问题,经过研究(https://answersweb.azurewebsites.net/MVC/Post/Thread/045cf703-1dbc-4f3f-9557-cba72af2f548?category=wdk),同样应该是驱动版本导致的。
解决方法是找到最新的 SDK 安装之,然后在安装目录下(默认在C:\Program Files (x86)\Windows Kits\10\Debuggers\x64\usb)可以找到最新的驱动。然后问题就可以解决了。
前面提到过 Ram Disk Protocol,这次尝试编写一个 Application 来完成创建 RamDisk 的动作。
首先看一下 Specification:
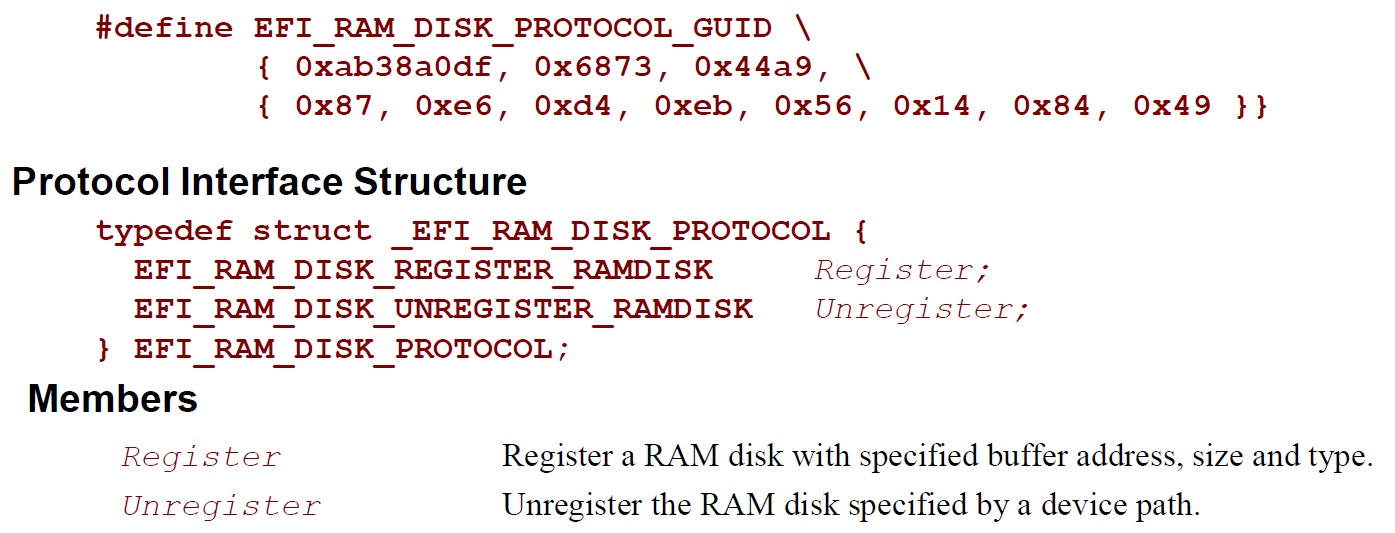
这个 Protocol 提供了2个函数,一个用来注册 RAM Disk 的Register,一个用来销毁 RAM Disk 的 Unregister。对于我们来说,注册的函数是最重要的。

注册一个Ram Disk 需要给定:
RamDiskBase: 新的 Ram Disk 的基地址
RamDiskSize: 新的 Ram Disk 的大小
RamDiskType: 新的 Ram Disk 的类型(似乎可以定义 ISO/RAW之类的)
ParentDevicePath: 指向父设备的 Device Path(不明白这个功能有什么意义)。如果没有可以设置为 NULL
DevicePath: 返回的创建的 Ram Disk 的 Device Path
有了上面的信息,我们即可完成创建工作。
编写一个测试代码,步骤如下:
1. 查找 RamDiskProtocol
2. 读取 “”MemTest.Img”到内存中
3. 用 RamDiskProtocol 的 Register 函数将上面的内存注册为 Ram Disk
完整代码:
/** @file
A simple, basic, application showing how the Hello application could be
built using the "Standard C Libraries" from StdLib.
Copyright (c) 2010 - 2011, Intel Corporation. All rights reserved.<BR>
This program and the accompanying materials
are licensed and made available under the terms and conditions of the BSD License
which accompanies this distribution. The full text of the license may be found at
http://opensource.org/licenses/bsd-license.
THE PROGRAM IS DISTRIBUTED UNDER THE BSD LICENSE ON AN "AS IS" BASIS,
WITHOUT WARRANTIES OR REPRESENTATIONS OF ANY KIND, EITHER EXPRESS OR IMPLIED.
**/
#include <Library/BaseLib.h>
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/PrintLib.h>
#include <Library/ShellCEntryLib.h>
#include <Protocol/RamDisk.h>
#include <Protocol/DevicePathToText.h>
#include <Protocol/EfiShell.h>
#include <Library/ShellLib.h>
extern EFI_BOOT_SERVICES *gBS;
/*
EFI_GUID gEfiVirtualDiskGuid =
{ 0x77AB535A, 0x45FC, 0x624B,
{0x55, 0x60, 0xF7, 0xB2, 0x81, 0xD1, 0xF9, 0x6E }};
*/
/***
Demonstrates basic workings of the main() function by displaying a
welcoming message.
Note that the UEFI command line is composed of 16-bit UCS2 wide characters.
The easiest way to access the command line parameters is to cast Argv as:
wchar_t **wArgv = (wchar_t **)Argv;
@param[in] Argc Number of argument tokens pointed to by Argv.
@param[in] Argv Array of Argc pointers to command line tokens.
@retval 0 The application exited normally.
@retval Other An error occurred.
***/
int
main (
IN int Argc,
IN char **Argv
)
{
EFI_STATUS Status;
EFI_RAM_DISK_PROTOCOL *MyRamDisk;
UINT64 *StartingAddr;
EFI_DEVICE_PATH_PROTOCOL *DevicePath;
EFI_FILE_HANDLE FileHandle;
EFI_FILE_INFO *FileInfo;
UINTN ReadSize;
// Look for Ram Disk Protocol
Status = gBS->LocateProtocol (
&gEfiRamDiskProtocolGuid,
NULL,
&MyRamDisk
);
if (EFI_ERROR (Status)) {
Print(L"Couldn't find RamDiskProtocol\n");
return EFI_ALREADY_STARTED;
}
//Open one Image and load it to the memory
//Open the file given by the parameter
Status = ShellOpenFileByName(
L"MemTest.IMG",
(SHELL_FILE_HANDLE *)&FileHandle,
EFI_FILE_MODE_READ,
0);
if(EFI_ERROR (Status)) {
Print(L"OpenFile failed! Error=[%r]\n",Status);
return EFI_SUCCESS;
}
//Get file size
FileInfo = ShellGetFileInfo((SHELL_FILE_HANDLE)FileHandle);
//Allocate a memory for Image
Status = gBS->AllocatePool (
EfiReservedMemoryType,
(UINTN)FileInfo-> FileSize,
(VOID**)&StartingAddr
);
if(EFI_ERROR (Status)) {
Print(L"Allocate Memory failed!\n");
return EFI_SUCCESS;
}
//Load the whole file to the buffer
Status = ShellReadFile(FileHandle,&ReadSize,StartingAddr);
if(EFI_ERROR (Status)) {
Print(L"Read file failed!\n");
return EFI_SUCCESS;
}
//
// Register the newly created RAM disk.
//
Status = MyRamDisk->Register (
((UINT64)(UINTN) StartingAddr),
FileInfo-> FileSize,
&gEfiVirtualDiskGuid,
NULL,
&DevicePath
);
if (EFI_ERROR (Status)) {
Print(L"Can't create RAM Disk!\n");
return EFI_SUCCESS;
}
//Show RamDisk DevicePath
{
EFI_DEVICE_PATH_TO_TEXT_PROTOCOL* Device2TextProtocol;
CHAR16* TextDevicePath = 0;
Status = gBS->LocateProtocol(
&gEfiDevicePathToTextProtocolGuid,
NULL,
(VOID**)&Device2TextProtocol
);
TextDevicePath =
Device2TextProtocol->ConvertDevicePathToText(DevicePath, FALSE, TRUE);
Print(L"DevicePath=%s\n", TextDevicePath);
Print(L"Disk Size =%d Bytes\n", FileInfo-> FileSize);
if(TextDevicePath)gBS->FreePool(TextDevicePath);
}
Print(L"Creat Ram Disk success!\n");
return 0;
}
运行结果:
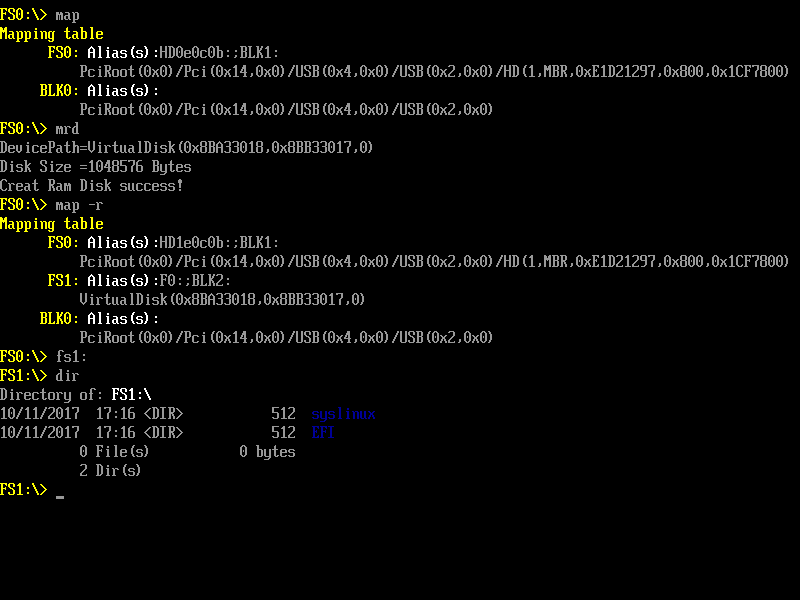
首先,可以看到系统中只有一个 Fs0:, 运行 mrd.efi 之后,系统中多了一个 Fs1,其中的内容就是 MemTest.Img的内容(使用的文件和之前的MemTest.Img 是相同的)。
编译生成的 X64 Application:
mrd
完整的代码:
MyRamDisk
简单的说Print Screen 可以用下面的方法发出来:
Keyboard.press(70+136);
delay(200);
Keyboard.releaseAll();
70 是来自 USB HID USAGE TABLE 中定义的 PrintScreen
+136 的原因可以参考 http://www.lab-z.com/lenoradekey/ 这篇文章
gBS 提供的 Stall 函数是我们经常用来做延时的过程。下面就介绍一下这个函数在NT32Pkg 中的具体实现。因为涉及到了具体的实现代码,所以列出来篇幅很长,对于大多数朋友来说直接看中文部分介绍就足够了。
首先,找到原型的定义,在 \MdeModulePkg\Core\Dxe\DxeMain\DxeMain.c
//
// DXE Core Module Variables
//
EFI_BOOT_SERVICES mBootServices = {
.........
(EFI_EXIT_BOOT_SERVICES) CoreExitBootServices, // ExitBootServices
(EFI_GET_NEXT_MONOTONIC_COUNT) CoreEfiNotAvailableYetArg1, // GetNextMonotonicCount
(EFI_STALL) CoreStall, // Stall
(EFI_SET_WATCHDOG_TIMER) CoreSetWatchdogTimer, // SetWatchdogTimer
(EFI_CONNECT_CONTROLLER) CoreConnectController, // ConnectController
.........
CoreStall 定义在 \MdeModulePkg\Core\Dxe\Misc\Stall.c 文件中。他接收的参数是暂停多少微秒,在这个函数中,防止计算溢出分别处理了休眠的事件很短和很长的情况,实际完成每一个单位的暂停是同一个函数:CoreInternalWaitForTick
EFI_STATUS
EFIAPI
CoreStall (
IN UINTN Microseconds
)
{
UINT64 Counter;
UINT32 Remainder;
UINTN Index;
if (gMetronome == NULL) {
return EFI_NOT_AVAILABLE_YET;
}
//
// Counter = Microseconds * 10 / gMetronome->TickPeriod
// 0x1999999999999999 = (2^64 - 1) / 10
//
if ((UINT64) Microseconds > 0x1999999999999999ULL) {
//
// Microseconds is too large to multiple by 10 first. Perform the divide
// operation first and loop 10 times to avoid 64-bit math overflow.
//
Counter = DivU64x32Remainder (
Microseconds,
gMetronome->TickPeriod,
&Remainder
);
for (Index = 0; Index < 10; Index++) {
CoreInternalWaitForTick (Counter);
}
if (Remainder != 0) {
//
// If Remainder was not zero, then normally, Counter would be rounded
// up by 1 tick. In this case, since a loop for 10 counts was used
// to emulate the multiply by 10 operation, Counter needs to be rounded
// up by 10 counts.
//
CoreInternalWaitForTick (10);
}
} else {
//
// Calculate the number of ticks by dividing the number of microseconds by
// the TickPeriod. Calculation is based on 100ns unit.
//
Counter = DivU64x32Remainder (
MultU64x32 (Microseconds, 10),
gMetronome->TickPeriod,
&Remainder
);
if (Remainder != 0) {
//
// If Remainder is not zero, then round Counter up by one tick.
//
Counter++;
}
CoreInternalWaitForTick (Counter);
}
return EFI_SUCCESS;
}
做每一个单位休眠的函数是CoreInternalWaitForTick,他调用的是 Metronome Architectural Protocol。
/**
Internal worker function to call the Metronome Architectural Protocol for
the number of ticks specified by the UINT64 Counter value. WaitForTick()
service of the Metronome Architectural Protocol uses a UINT32 for the number
of ticks to wait, so this function loops when Counter is larger than 0xffffffff.
@param Counter Number of ticks to wait.
**/
VOID
CoreInternalWaitForTick (
IN UINT64 Counter
)
{
while (RShiftU64 (Counter, 32) > 0) {
gMetronome->WaitForTick (gMetronome, 0xffffffff);
Counter -= 0xffffffff;
}
gMetronome->WaitForTick (gMetronome, (UINT32)Counter);
}
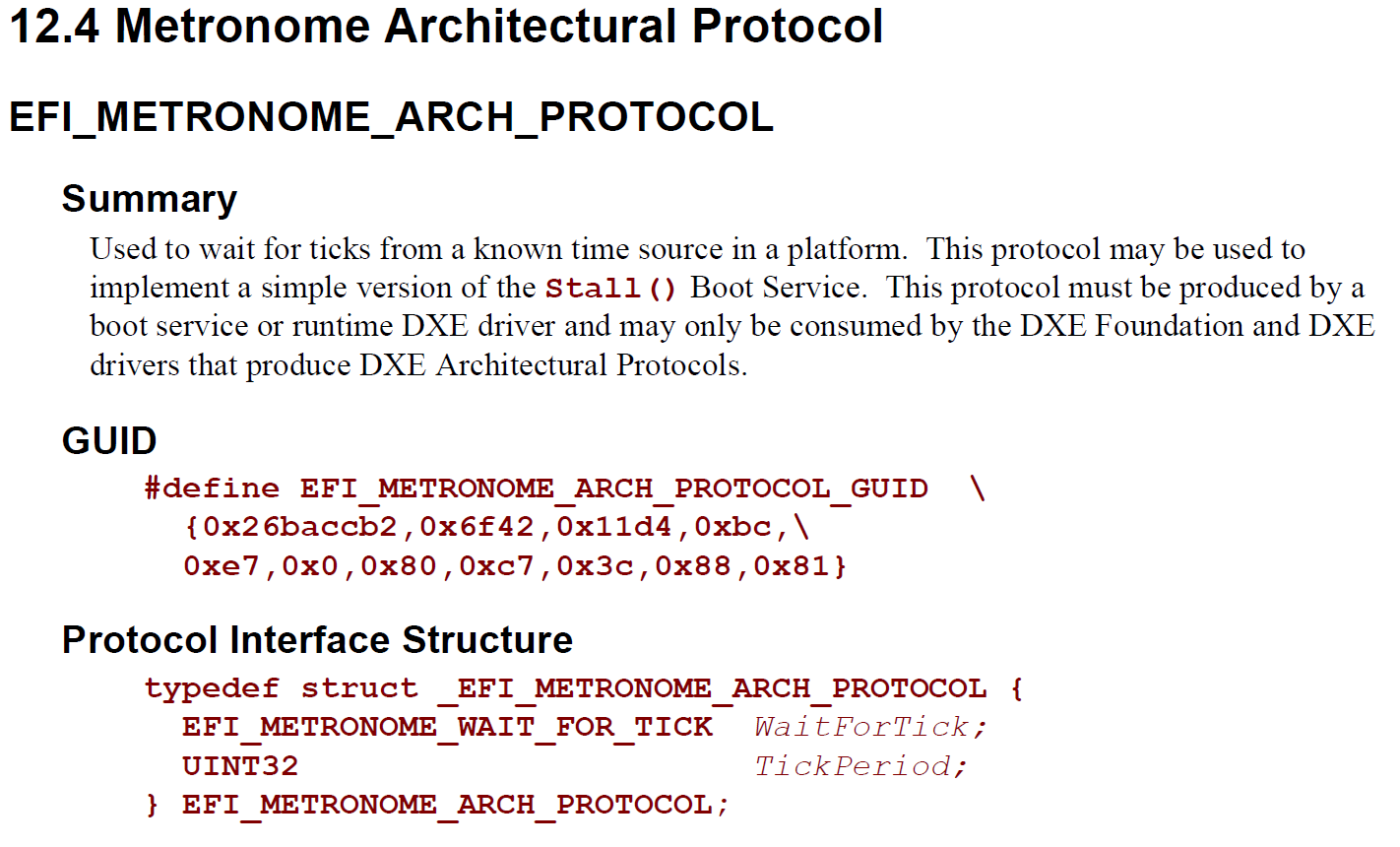
gMetronome 是EFI_METRONOME_ARCH_PROTOCOL ,在 \MdeModulePkg\Core\Dxe\DxeMain\DxeMain.c 中
EFI_METRONOME_ARCH_PROTOCOL *gMetronome = NULL;
具体这个 Protocol 可以在 PI Specification 中找到:
他的成员包括一个函数和一个变量, WaitForTick 是用来做实际延时的, TickPeriod 是用来说明WaitForTick函数的单位的。TickPeriod的单位是100ns,最长不能超过 200us。为了实验,编写下面的Application:
/** @file
A simple, basic, application showing how the Hello application could be
built using the "Standard C Libraries" from StdLib.
Copyright (c) 2010 - 2011, Intel Corporation. All rights reserved.<BR>
This program and the accompanying materials
are licensed and made available under the terms and conditions of the BSD License
which accompanies this distribution. The full text of the license may be found at
http://opensource.org/licenses/bsd-license.
THE PROGRAM IS DISTRIBUTED UNDER THE BSD LICENSE ON AN "AS IS" BASIS,
WITHOUT WARRANTIES OR REPRESENTATIONS OF ANY KIND, EITHER EXPRESS OR IMPLIED.
**/
#include <Library/BaseLib.h>
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/PrintLib.h>
#include <Library/ShellCEntryLib.h>
#include <Protocol/Metronome.h>
EFI_GUID gEfiMetronomeArchProtocolGuid =
{ 0x26BACCB2, 0x6F42, 0x11D4,
{ 0xBC, 0xE7, 0x00, 0x80, 0xC7, 0x3C, 0x88, 0x81 }};
extern EFI_BOOT_SERVICES *gBS;
/***
Demonstrates basic workings of the main() function by displaying a
welcoming message.
Note that the UEFI command line is composed of 16-bit UCS2 wide characters.
The easiest way to access the command line parameters is to cast Argv as:
wchar_t **wArgv = (wchar_t **)Argv;
@param[in] Argc Number of argument tokens pointed to by Argv.
@param[in] Argv Array of Argc pointers to command line tokens.
@retval 0 The application exited normally.
@retval Other An error occurred.
***/
int
main (
IN int Argc,
IN char **Argv
)
{
EFI_METRONOME_ARCH_PROTOCOL *Metronome;
EFI_STATUS Status;
//
// Locate the Cpu Arch Protocol.
//
Status = gBS->LocateProtocol (&gEfiMetronomeArchProtocolGuid, NULL, &Metronome);
if (EFI_ERROR (Status)) {
Print(L"Can't find EFI_METRONOME_ARCH_PROTOCOL\n");
return Status;
}
Print(L"TickPeriod=%d\n",Metronome->TickPeriod);
return 0;
}
运行之后输出结果如下:
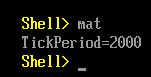
意思是,在 NT32 模拟环境中,一个Tick的时长是 2000*100ns=200us。在Code中,这个值是固定的,在\Nt32Pkg\MetronomeDxe\Metronome.c 定了下面这个结构体:
//
// Global Variables
//
EFI_METRONOME_ARCH_PROTOCOL mMetronome = {
WinNtMetronomeDriverWaitForTick,
TICK_PERIOD
};
在 \Nt32Pkg\MetronomeDxe\Metronome.h 中给定了TICK_PERIOD 的值,如果把这个定义修改为 2001,那么再次运行 Application ,输出值也会变化
// // Period of on tick in 100 nanosecond units // #define TICK_PERIOD 2000
同样的,处理NT32 “硬件”延时相关的代码就是WinNtMetronomeDriverWaitForTick,在\Nt32Pkg\MetronomeDxe\Metronome.c 文件中:
EFI_STATUS
EFIAPI
WinNtMetronomeDriverWaitForTick (
IN EFI_METRONOME_ARCH_PROTOCOL *This,
IN UINT32 TickNumber
)
/*++
Routine Description:
The WaitForTick() function waits for the number of ticks specified by
TickNumber from a known time source in the platform. If TickNumber of
ticks are detected, then EFI_SUCCESS is returned. The actual time passed
between entry of this function and the first tick is between 0 and
TickPeriod 100 nS units. If you want to guarantee that at least TickPeriod
time has elapsed, wait for two ticks. This function waits for a hardware
event to determine when a tick occurs. It is possible for interrupt
processing, or exception processing to interrupt the execution of the
WaitForTick() function. Depending on the hardware source for the ticks, it
is possible for a tick to be missed. This function cannot guarantee that
ticks will not be missed. If a timeout occurs waiting for the specified
number of ticks, then EFI_TIMEOUT is returned.
Arguments:
This - The EFI_METRONOME_ARCH_PROTOCOL instance.
TickNumber - Number of ticks to wait.
Returns:
EFI_SUCCESS - The wait for the number of ticks specified by TickNumber
succeeded.
--*/
{
UINT64 SleepTime;
//
// Calculate the time to sleep. Win API smallest unit to sleep is 1 millisec
// Tick Period is in 100ns units, divide by 10000 to convert to ms
//
SleepTime = DivU64x32 (MultU64x32 ((UINT64) TickNumber, TICK_PERIOD) + 9999, 10000);
gWinNt->Sleep ((UINT32) SleepTime);
return EFI_SUCCESS;
}
可以看到,Nt32 虚拟机中最终是使用 Sleep 来实现的,这个Api 最小取值为 1毫秒(千分之一),在编写一些在 NT32模拟环境下运行的程序时,也要特别注意他延时的最小单位只有1毫秒。
对应在具体的实体机上,会有更加精确的延时,有兴趣的朋友不妨追踪一下手中的代码,看看具体是如何实现的。
本文提到的 Application 下载:
最近开通了本网站的公众号,有兴趣的朋友可以订阅一下。内容上和本网站并无不同,主要是为了方便读者,可以方便的得知最近在讲什么,有兴趣再到电脑上查看原文就足够了。
