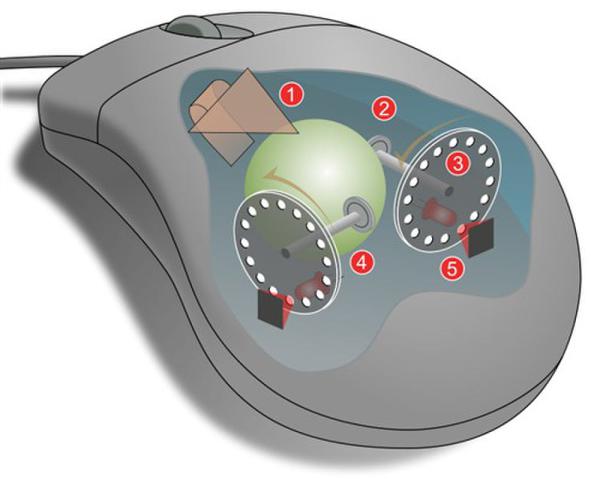
鼠标是目前玩电脑的必不可少的配备了。我最早接触的是机械鼠标,中间有一个滚球,带动内部的机械,配合光学器件将旋转信号转化为电子信号,通过串口或者PS2接口传输到电脑上。
【参考1】
这样的鼠标缺点是定位不是很准确,并且容易脏,下面的球滚动一段就会蹭上泥垢,看起来比较恶心。
再后来出现了光电鼠标,那时候的光电鼠标必须在专用的鼠标垫上才能用,那种鼠标垫上面有网格状的东西,只有在它上面,鼠标发出光线才能正确的反馈,换句话说没有特定的鼠标垫根本无法使用。当然,那时候用电脑还是一项非常严重的事情,上机需要按照“团结紧张严肃活泼”的方针,先洗手再换鞋套之类的。
再再后来就出现了目前我们最常见到的光电鼠标,各种材质都可以使用,非常方便。原理上也发生了巨大的变化,简单的说就是现在的鼠标下面有一个类似照相机一样的东西不断给接触面拍照,移动会导致每次画面的变化,然后DSP根据画面不同计算出移动的距离再反馈给PC当前的移动距离信息。
当然,未来还可能出现更新原理的鼠标,比如:象象利用加速度传感器做的 “体感空中鼠”,等等。
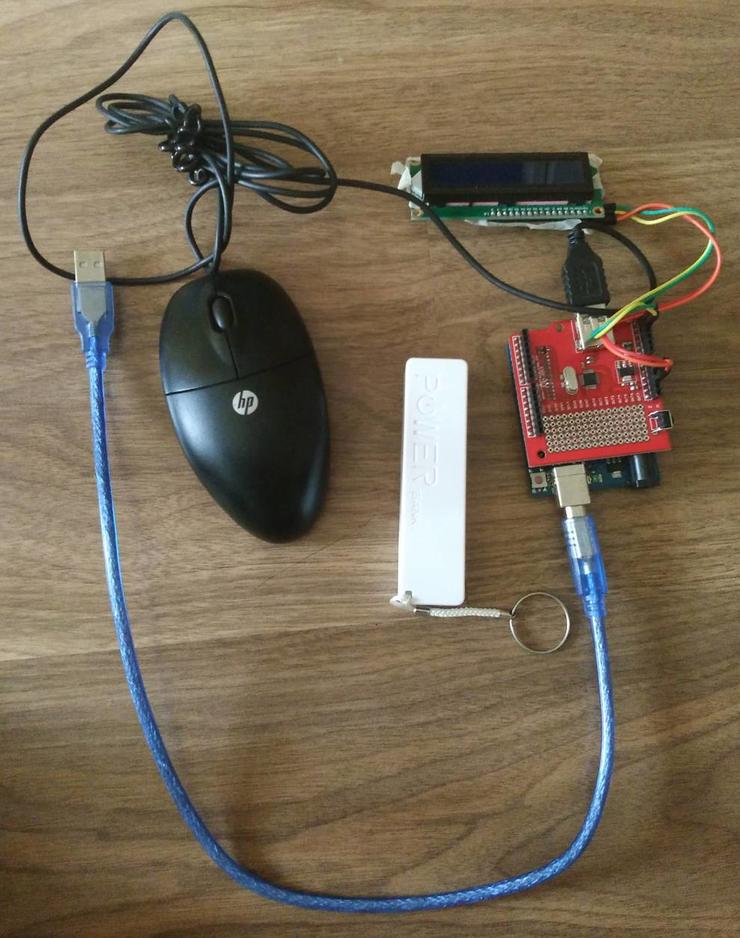
我始终有一个想法:是否可以用鼠标来做一个电子尺,因为鼠标移动特定距离之后的输出也是固定的,意思是:鼠标移动10cm,输出的点位应该是固定的,比如:2000之类(DPI是定值)。反过来,如果我们知道鼠标移动了多少点,也就能确定鼠标移动了多少距离。最近接触了Arduino USB Shield ,于是打造一个鼠标尺。
材料准备
Arduino Uno
Arduino USB Shield
USB鼠标
USB充电宝
1602 LCD
导线 4根
实现原理
使用 USB Shield 来做USB HOST,在初始化的时候将鼠标切换到Boot Protocol,切换的好处是避免针对每种鼠标特别分析Descriptor,可以直接使用输出的数据(虽然是都要遵循HID协议,还真有不支持Boot Protocol的,这种情况需要单独处理了)。每次鼠标有动作,都会用Interrupt 方式通知到HOST来处理。我们根据输出的位移(相对位移),可以得知移动了多少。
#include “max3421e.h”
#include “usb.h”
#include “LiquidCrystal_I2C.h”
#include
#define DEVADDR 1
#define CONFVALUE 1
#define EP_MAXPKTSIZE 5
EP_RECORD ep_record[ 2 ]; //endpoint record structure for the mouse
void setup();
void loop();
MAX3421E Max;
USB Usb;
LiquidCrystal_I2C lcd(0x27,16,2);
double distance =0;
void setup()
{
lcd.init(); //初始化LCD
lcd.backlight(); //打开背光
Serial.begin( 115200 );
Serial.println(“Start”);
Max.powerOn();
lcd.setCursor(0,0);
lcd.print(” Distance “);
delay( 200 );
}
void loop()
{
byte rcode;
Max.Task();
Usb.Task();
if( Usb.getUsbTaskState() == USB_STATE_CONFIGURING ) {
mouse1_init();
}//if( Usb.getUsbTaskState() == USB_STATE_CONFIGURING…
if( Usb.getUsbTaskState() == USB_STATE_RUNNING ) { //状态机运行
rcode = mouse1_poll();
if( rcode ) {
Serial.print(“Mouse Poll Error: “);
Serial.println( rcode, HEX );
}//if( rcode…
}//if( Usb.getUsbTaskState() == USB_STATE_RUNNING…
}
/* 鼠标初始化 */
void mouse1_init( void )
{
byte rcode = 0; //return code
byte tmpdata;
byte* byte_ptr = &tmpdata;
/**/
ep_record[ 0 ] = *( Usb.getDevTableEntry( 0,0 )); //copy endpoint 0 parameters
ep_record[ 1 ].MaxPktSize = EP_MAXPKTSIZE;
ep_record[ 1 ].sndToggle = bmSNDTOG0;
ep_record[ 1 ].rcvToggle = bmRCVTOG0;
Usb.setDevTableEntry( 1, ep_record );
/* Configure device */
rcode = Usb.setConf( DEVADDR, 0, CONFVALUE );
if( rcode ) {
Serial.print(“Error configuring mouse. Return code : “);
Serial.println( rcode, HEX );
while(1); //stop
}//if( rcode…
rcode = Usb.getIdle( DEVADDR, 0, 0, 0, (char *)byte_ptr );
if( rcode ) {
Serial.print(“Get Idle error. Return code : “);
Serial.println( rcode, HEX );
while(1); //stop
}
Serial.print(“Idle Rate: “);
Serial.print(( tmpdata * 4 ), DEC ); //rate is returned in multiples of 4ms
Serial.println(” ms”);
tmpdata = 0;
rcode = Usb.setIdle( DEVADDR, 0, 0, 0, tmpdata ); //切换为Boot Protocol
if( rcode ) {
Serial.print(“Set Idle error. Return code : “);
Serial.println( rcode, HEX );
while(1); //stop
}
Usb.setUsbTaskState( USB_STATE_RUNNING );
return;
}
/* Poll mouse via interrupt endpoint and print result */
/* assumes EP1 as interrupt endpoint */
byte mouse1_poll( void )
{
byte rcode,i;
byte x;
byte y;
char res[12];
char buf[ 4 ] = { 0 };
/* poll mouse */
rcode = Usb.inTransfer( DEVADDR, 1, 4, buf, 1 ); //
if( rcode ) { //error
if( rcode == 0x04 ) { //NAK
rcode = 0;
}
return( rcode );
}
/* print buffer */
if( buf[ 0 ] & 0x01 ) {
distance=0;
}
//目前已经切换到 Boot Protocol, 输出的 Byte 2 3 分别是 X 和 Y
x=abs(buf[1]);
y=abs(buf[2]);
Serial.print(“X-axis: “);
Serial.print( buf[1], DEC); Serial.print(” “); Serial.println( x, DEC);
Serial.print(“Y-axis: “);
Serial.print( buf[2], DEC); Serial.print(” “); Serial.println(y , DEC);
distance=distance+sqrt(x*x+y*y); //计算移动距离
String dataString = “”;
//Double转String
dataString = dtostrf(distance, 5, 4, res);
Serial.println(dataString);
lcd.setCursor(0,1);
lcd.print(” “);
lcd.print(dataString);
lcd.print(” “);
return( rcode );
}
制作过程也就是连接过程,Shield直接插,1602 LCD四根线,GND VCC SDA SCL 接对了就好。
工作时就是这个样子
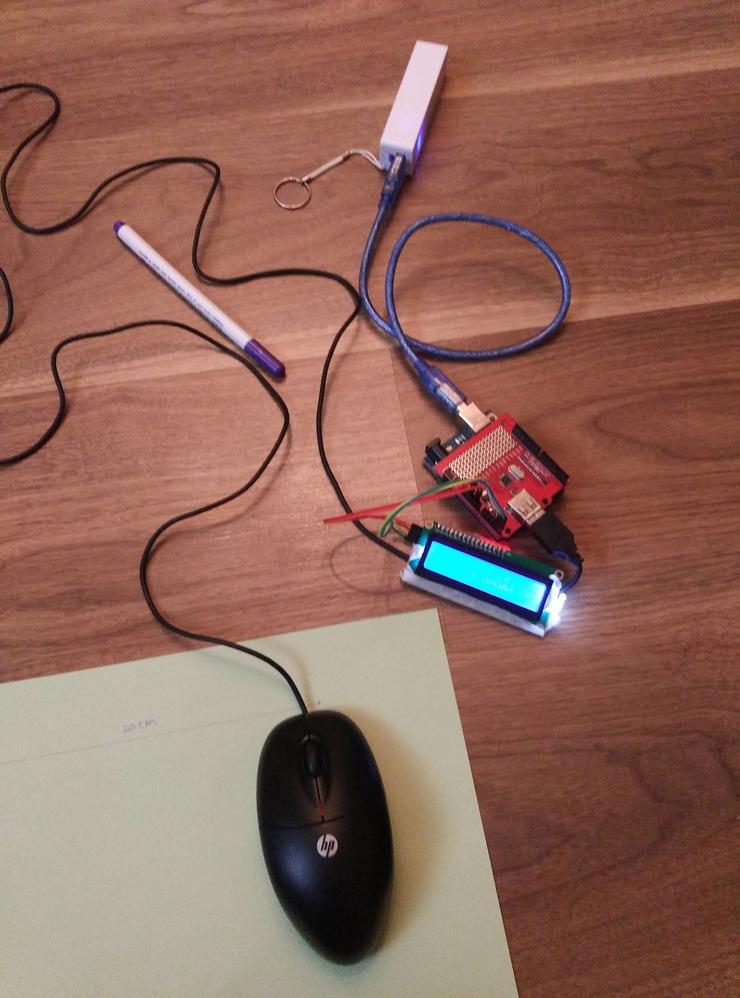
实际上显示的是移动了多少点,具体还要进行换算为实际的距离,每个鼠标的DPI不同,相同的点位表示的实际距离也不相同。上述程序我没有做这个转换,如果有需要在编程的时候拉一个已知长度的线段折算一下即可知。

工作视频
http://www.tudou.com/programs/view/hcsKy9hKCVg/?resourceId=414535982_06_02_99
完整的代码下载
mruler
完成之后,到了老婆提问时间,我们有如下对话
她:这个是干什么的啊?
我:这个是尺
她:尺子是干什么的?
我:尺子就是测量距离的啊
她:那为什么要测量距离?
我:比如一根直线你想知道它多长,需要测量啊
她:那家里有直尺为什么不用。
(这个问题很Sharp…….我想了一会才回答)
我:万一你要测量一个非直线的物体你需要用这个啊。比如,测量一个圆。
她:我为什么要测量一个圆的周长啊
我:你能不能问点有建设性的问题?
她:唔。那我可以用直尺测量圆的直径然后根据圆周率测量周长啊。
(又是一个Sharp的问题!)
我:直径不好确定,另外,没有直接测量方便啊!
她:那你要沿着圆走一圈哎~ 这样不准
(更加Sharp的问题!!我想了一下)
我:从理论上来说,人类无法直接测量出一个圆的周长,因为Pi是无限不循环小数,周长一定也是一个无限不循环小数。人类历史上在逼近圆周率的时候就是采用……..
她:为什么要测量周长呢?
(沉思片刻)
我:比如,你要测量一个椭圆的周长
她:椭圆周长有公式,数学书上有,虽然我现在不记得但是确定有。
(长考虑中…….)
我:再举个例子,比如,你要测量一个抛物线(嗯,这个她听过,肯定也知道公式)。不~ 你要测量一个悬链线(我打赌她肯定都没有听说过)。
她:为什么我要…….
我:不说了,我去唱歌了 《1999谢谢你的爱》
参考:
1. 图片来自 http://it.21cn.com/hardware/mouse/a/2009/0428/20/6209325.shtml 蓝影PK激光!最强游戏鼠标“溜冰“测试
2. http://acc.pconline.com.cn/mouse/study_mouse/0902/1550361_1.html 让你一夜成高手!鼠标知识最全面充电宝典
3. http://www.lab-z.com/usbkb/ Arduino 控制USB设备(5)解析USB键盘的例子