2026年2月更新,Step to UEFI 文章索引:
Step to UEFI (308)UEFI Shell 下的 PPM转JPEG 程序
经过大量的测试和研究,终于找到一个可以工作的代码,能够将PPM转为JPEG 格式(通过前面的文章,我们也知道PPM和BMP 区别不大)。
项目来自 https://github.com/schiermike/jpeg-encoder/tree/master ,只有一个文件,能将PPM 转为 JPG 格式。
代码很长,这里就不列出了,有兴趣的可以直接下载研究。
需要注意的是:
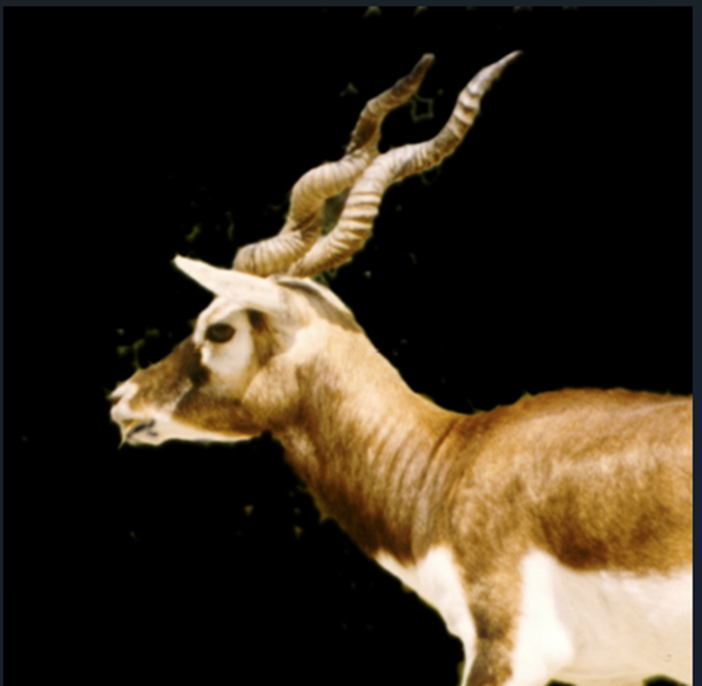
1.只能除了宽度是16整数倍的图片(实际使用中,通常的处理方法是先填充到16的整数倍,处理完成之后再裁剪)

2.代码颜色上应该还有一些问题,估计是颜色排列错误
处理后的结果是
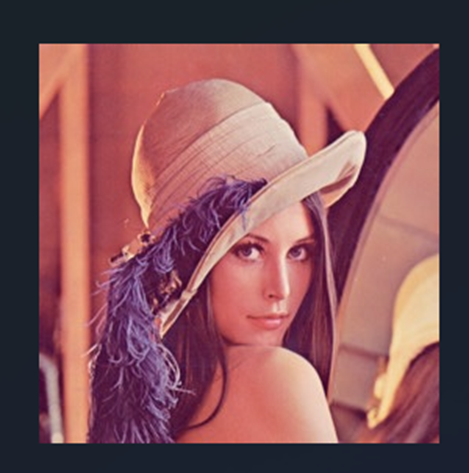
3.测试 Lenna图片
处理之后的结果
4.代码对于 PPM 格式有一些要求,文件头的参数需要用 0x0A 来进行分割,如果换成 0x0D 之类的会报错。

完整的代码和测试数据下载:
力科的 USB 抓包工具的小Bug
最近在Ch32V307上实现 USB Camera 的功能,使用之前的一个设计作为参考。结果在照抄的描述符的时候时偶然发现力科的USB T3 存在一个小Bug。
问题的描述为:描述符解析时,部分值不会反映的 Hex Value中:
最典型的是下面这个 GUID, 解析之后只有部分值,其余部分被丢掉了,如果你认为这个Field 的值为 0x32315659 只有4字节,会导致后续的描述符完全错位:
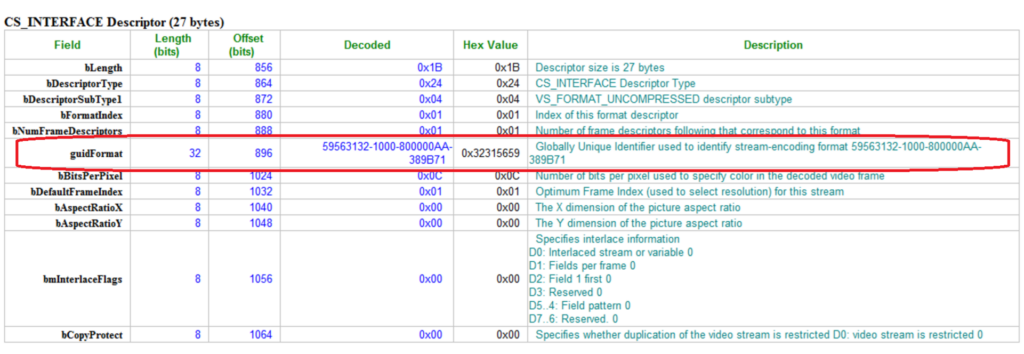
上面这种相对明显,因为 明确知道GUID应该是 16Bytes,但是下面这个就比较隐蔽,如果只将 Hex Value拷贝出来,会导致对应的结构体会不够 12 Bytes。
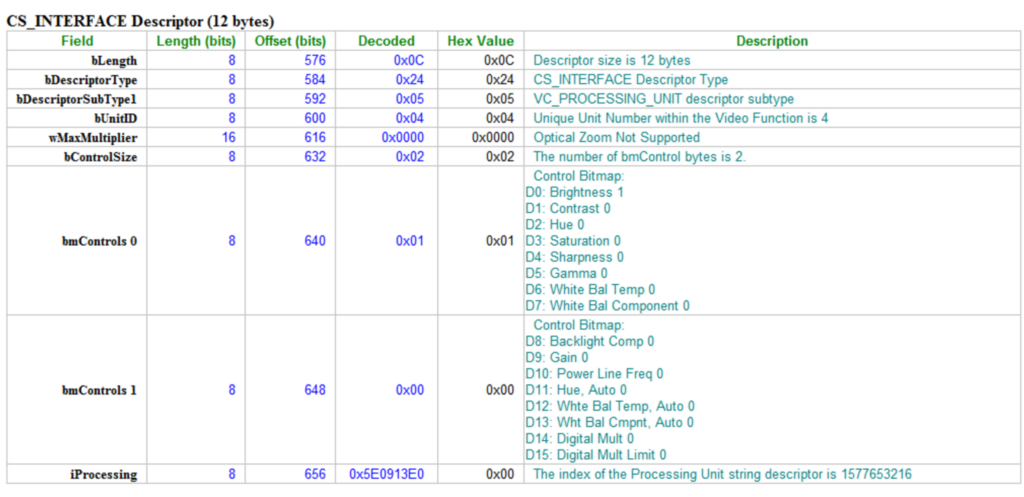
因此,使用工具 Dump USB设备描述符,然后编写自己的描述符时,务必数一下最后的描述符长度。
ESP32S3+MSM261S4030H0+HT513 扬声器
去年使用ESP32S3+MSM261S4030H0+HT513 做了一个扬声器的项目。具体硬件设计可以在 https://oshwhub.com/arduinoai-hao-zhe/portable-speake 看到。
在使用的时候,遇到的一个问题就是MSM261S4030H0输出是32Bits(实际只有24Bits)。最近忽然想起来查了一下是否有机会按照 16Bits输出,搜索出来的资料说的是:只要设置 I2S Master按照16Bits 取即可。因为这个输出有效数据只有 24Bits,直接截断取前面的16Bit即可。
根据这个资料编写代码如下,工作正常。
#include <Arduino.h>
#include <Wire.h>
#include <driver/i2s.h>
#define I2S_PORT1 I2S_NUM_0
#define I2S_PORT2 I2S_NUM_1
#define SAMPLE_RATE 16000
#define CHANNEL_FORMAT I2S_CHANNEL_FMT_ONLY_LEFT
//#define BITS_PER_SAMPLE I2S_BITS_PER_SAMPLE_32BIT
#define BITS_PER_SAMPLE I2S_BITS_PER_SAMPLE_16BIT
#define MIC_BCK_PIN 37
#define MIC_WS_PIN 38
#define MIC_DATA_PIN 36
#define SPK_BCK_PIN 15
#define SPK_WS_PIN 6
#define SPK_DATA_PIN 7
#define SPK_MCK_PIN 16
// HT513 音量
uint16_t Volume;
#define TOLENCE 16
#define HT513_ADDR_L 0x6c
/**
@brief ht513写寄存器
@param addr 寄存器地址
@param val 要写的值
@retval None
*/
void HT513_WriteOneByte(uint8_t addr, uint8_t val)
{
Wire.beginTransmission(HT513_ADDR_L);
Wire.write(addr);
Wire.write(val);
int ack = Wire.endTransmission(true);
Serial.print("Ack ");
Serial.println(ack, HEX);
}
/**
@brief ht513读寄存器
@param addr 寄存器地址
@retval 读取到的寄存器值
*/
uint8_t HT513_ReadOneByte(uint8_t addr)
{
uint8_t temp = 0;
Wire.beginTransmission(HT513_ADDR_L);
Wire.write(addr);
Wire.endTransmission(false);
uint8_t bytesReceived = 0;
bytesReceived = Wire.requestFrom(HT513_ADDR_L, (uint8_t)1, true);
if (bytesReceived == 1) {
temp = Wire.read();
}
else {
Serial.println("Read Error ");
}
return temp;
}
void setup() {
Serial.begin(115200);
delay(2000);
i2s_config_t MIC_i2sConfig = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_RX),
.sample_rate = SAMPLE_RATE,
.bits_per_sample = BITS_PER_SAMPLE,
.channel_format = CHANNEL_FORMAT,
.communication_format = I2S_COMM_FORMAT_I2S,
.intr_alloc_flags = 0,
.dma_buf_count = 8,
.dma_buf_len = 64,
.use_apll = false,
.tx_desc_auto_clear = false,
.fixed_mclk = 0
};
i2s_pin_config_t MIC_pinConfig = {
.bck_io_num = MIC_BCK_PIN,
.ws_io_num = MIC_WS_PIN,
.data_out_num = I2S_PIN_NO_CHANGE,
.data_in_num = MIC_DATA_PIN
};
i2s_driver_install(I2S_PORT1, &MIC_i2sConfig, 0, NULL);
i2s_set_pin(I2S_PORT1, &MIC_pinConfig);
i2s_config_t SPK_i2sConfig = {
.mode = (i2s_mode_t)(I2S_MODE_MASTER | I2S_MODE_TX),
.sample_rate = SAMPLE_RATE,
.bits_per_sample = BITS_PER_SAMPLE,
.channel_format = CHANNEL_FORMAT,
.communication_format = I2S_COMM_FORMAT_I2S,
.intr_alloc_flags = 0,
.dma_buf_count = 8,
.dma_buf_len = 64,
.use_apll = false,
.tx_desc_auto_clear = false,
.fixed_mclk = 0
};
i2s_pin_config_t SPK_pinConfig = {
.mck_io_num = SPK_MCK_PIN,
.bck_io_num = SPK_BCK_PIN,
.ws_io_num = SPK_WS_PIN,
.data_out_num = SPK_DATA_PIN,
.data_in_num = I2S_PIN_NO_CHANGE
};
i2s_driver_install(I2S_PORT2, &SPK_i2sConfig, 0, NULL);
i2s_set_pin(I2S_PORT2, &SPK_pinConfig);
analogReadResolution(9);
Wire.begin(18, 17);
// 设置 SD 为LOW
HT513_WriteOneByte(0x12, 0b11110000);
// 设置数据格式为 I2S, 16Bits
HT513_WriteOneByte(0x13, 0b00110000);
// 读取音量设置
Volume = analogRead(3);
uint8_t Vol = (Volume, 0, 511, 0x07, 0xff);
HT513_WriteOneByte(0x16, Vol);
HT513_WriteOneByte(0x15, Vol);
Serial.println(Volume, HEX);
// 调整声道
HT513_WriteOneByte(0x17, 0b10110000);
Serial.println("++++++++++++++++");
// 设置 SD 为HIGH
HT513_WriteOneByte(0x12, 0b11110100);
uint8_t Value = HT513_ReadOneByte(0x12);
Serial.println(Value, HEX);
Value = HT513_ReadOneByte(0x13);
Serial.println(Value, HEX);
Value = HT513_ReadOneByte(0x16);
Serial.println(Value, HEX);
Value = HT513_ReadOneByte(0x17);
Serial.println(Value, HEX);
Serial.print(" starting");
// dsp.beginAEC(256, 1024, 16000); // Initialize AEC with frame size, filter length, and sample rate
// dsp.enableAEC(true); // Enable AEC
}
int8_t mic[512], speaker[521], out[512];
void loop() {
size_t bytesRead = 0;
i2s_read(I2S_PORT1, &mic, sizeof(mic), &bytesRead, portMAX_DELAY);
i2s_write(I2S_PORT2, &mic, sizeof(mic), &bytesRead, portMAX_DELAY);
if (abs(analogRead(3) - Volume) > TOLENCE) {
// 读取音量设置
Volume = analogRead(3);
// 设置 SD 为LOW
HT513_WriteOneByte(0x12, 0b11110000);
uint8_t Vol = map(Volume, 0, 511, 0x07, 0xff);
HT513_WriteOneByte(0x16, Vol);
// 设置 SD 为HIGH
HT513_WriteOneByte(0x12, 0b11110100);
Serial.print(analogRead(3), HEX);
Serial.print(" ");
Serial.print(Volume, HEX);
Serial.print(" ");
Serial.println(Vol, HEX);
}
}
Step to UEFI (307)UEFI 下使用PRIu8 以及类似宏
上次的代码中碰到了C语言中的 PRIu8 ,这次专门研究了一下如何在代码中直接使用。
<inttypes.h> 是 C 标准库提供的头文件,其中有定义(例如EDK2 中的StdLib\Include\X64\machine\int_fmtio.h文件):
#define PRIu8 "u" /* uint8_t */
#define PRIu16 "u" /* uint16_t */
#define PRIu32 "u" /* uint32_t */
它们C99 标准引入的格式说明符宏。可以通过下面的这种方法进行使用:
printf("Value: %" PRIu16 "\n", value);
在 C 语言中,当你编写多个字符串字面量(例如使用双引号括起来的字符串)在代码中相邻放置时,编译器会自动将它们连接起来形成一个单独的字符串,这被称作C 语言的字符串字面量的自动连接,所以上述代码展开后就是:
printf("Value: %u \n", value);
在EDK2 中编译一个简单的代码进行验证:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <inttypes.h>
#include <Uefi.h>
#include <Library/UefiLib.h>
#define LABZTest "LABZ"
int main(int argc, char *argv[]) {
printf("Value: " LABZTest "\n");
return 0;
}
模拟器中运行结果如下:
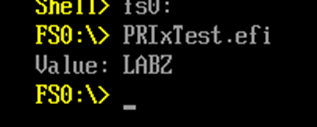
上述试验说明 VC2019 完全支持字符串字面量的自动连接。
所以理论上只要引用了inttypes.h 就可以使用PRIu8 这种宏定义,但是还是会遇到编译期的错误。经过研究发现 \StdLib\Include\inttypes.h 中相关引用是被注释掉的。下图中左侧是原始的代码,右侧是修改后的。完全无法理解原始代码要去掉这个引用,经过这样的修改即可正常编译和执行:
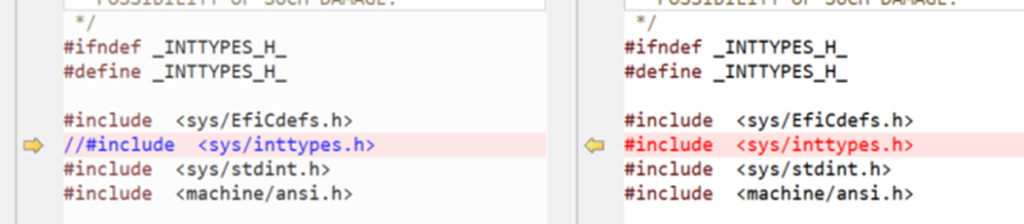
完整的测试代码:
#include <stdio.h>
#include <inttypes.h>
#include <Uefi.h>
#include <Library/UefiLib.h>
int main(int argc, char *argv[]) {
printf("Value: %" PRIu8 "\n",1234);
return 0;
}
模拟器中测试,得到了期望的结果:
完整的代码下载:
NSPGD1M006DT04 测试模块
一、项目介绍
本项目使用表压传感器NSPGD1M006DT04,制作了一个模块,能够获得当前的气压。
很多年前,如果需要制作“吹气熄灯项目”,通常只能使用声音传感器,使用获取声音的方法来判断是否进行了吹气,显而易见这种方法要受到诸多影响。现在可以使用NSPGD1M006DT04 这种传感器来来完成。
二、项目设计思路
1、芯片选型
NSPGD1M006DT04是表压传感器。表压传感器(Gauge Pressure Sensor)是一种测量相对压力的传感器,即相对于大气压力的压力值。相对的还有绝压传感器(Absolute Pressure Sensor)是一种测量相对于真空或绝对零点的压力的传感器。与表压传感器不同,绝压传感器不仅测量被测介质的压力,还考虑到环境中的气压。绝压传感器的工作原理与表压传感器类似,但其参考点是绝对真空或绝对零点而不是大气压力。
2、测试主控选型
为了方便进行测试,选择使用 Arduino 来作为主控,它可以方便的实现 I2C 通讯,同时我们还会设计一个 Arduino 的库,方便日后的使用。
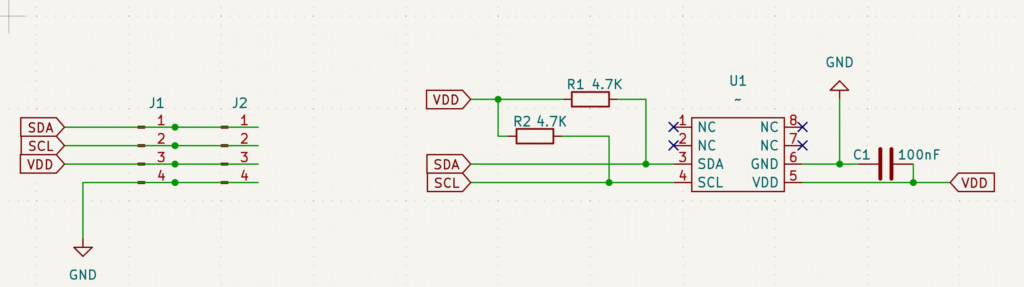
3、原理图绘制
作为模块,非常简单,严格按照Datasheet设计。下图是 DataSheet 中给出的参考:
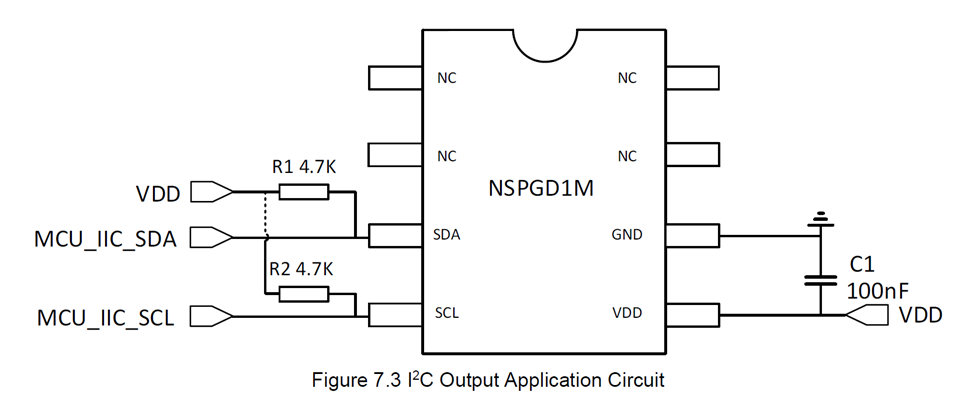
据此设计的模块电路图:
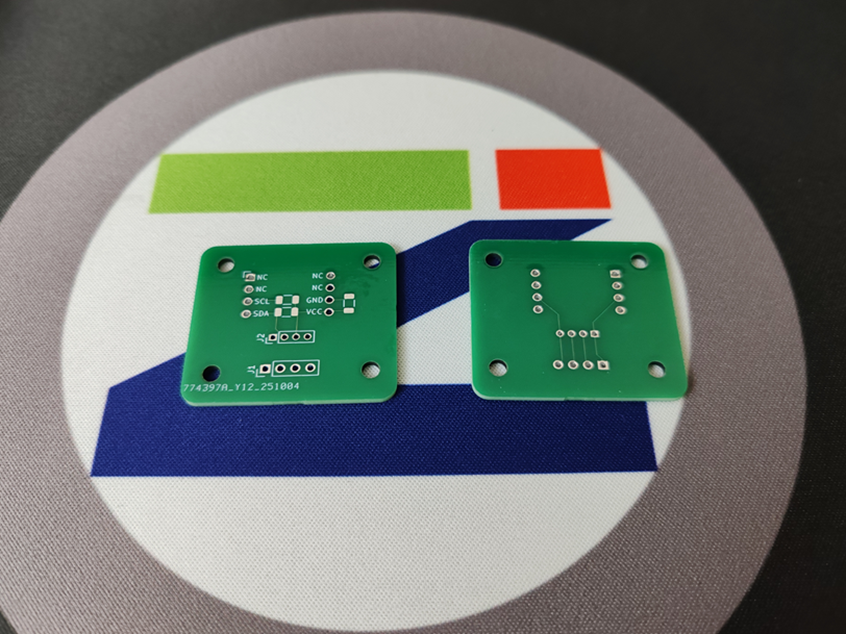
4、PCB绘制与制板
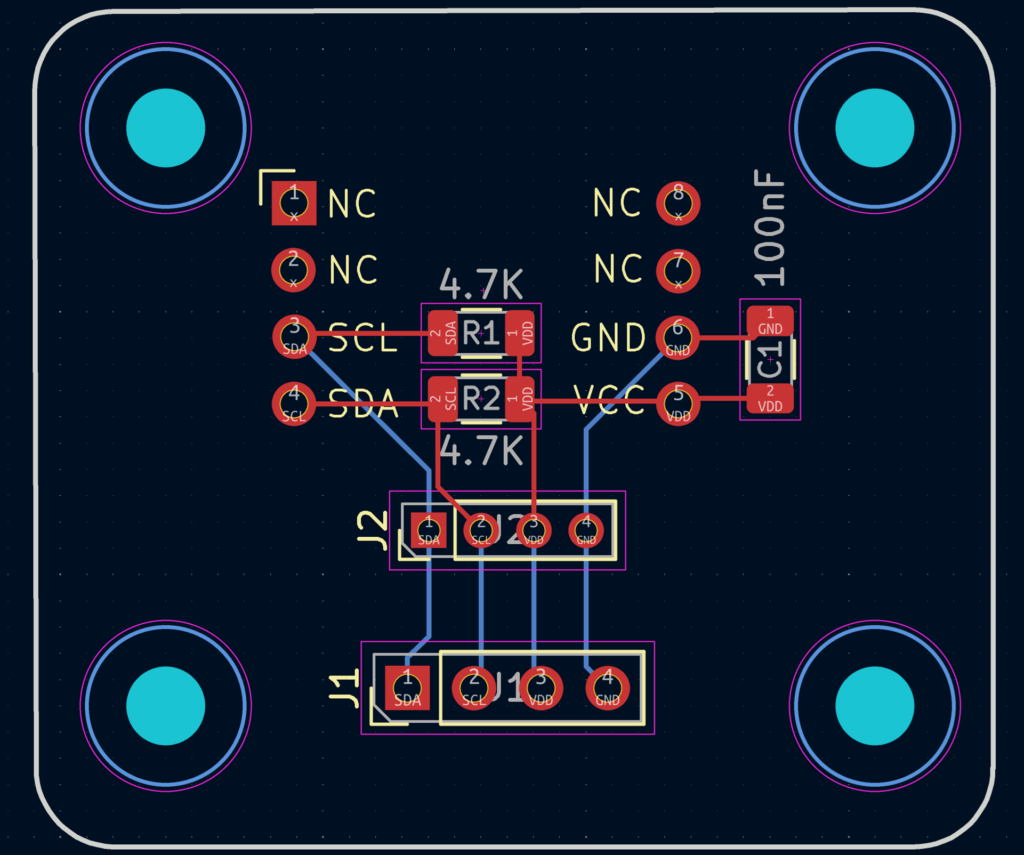
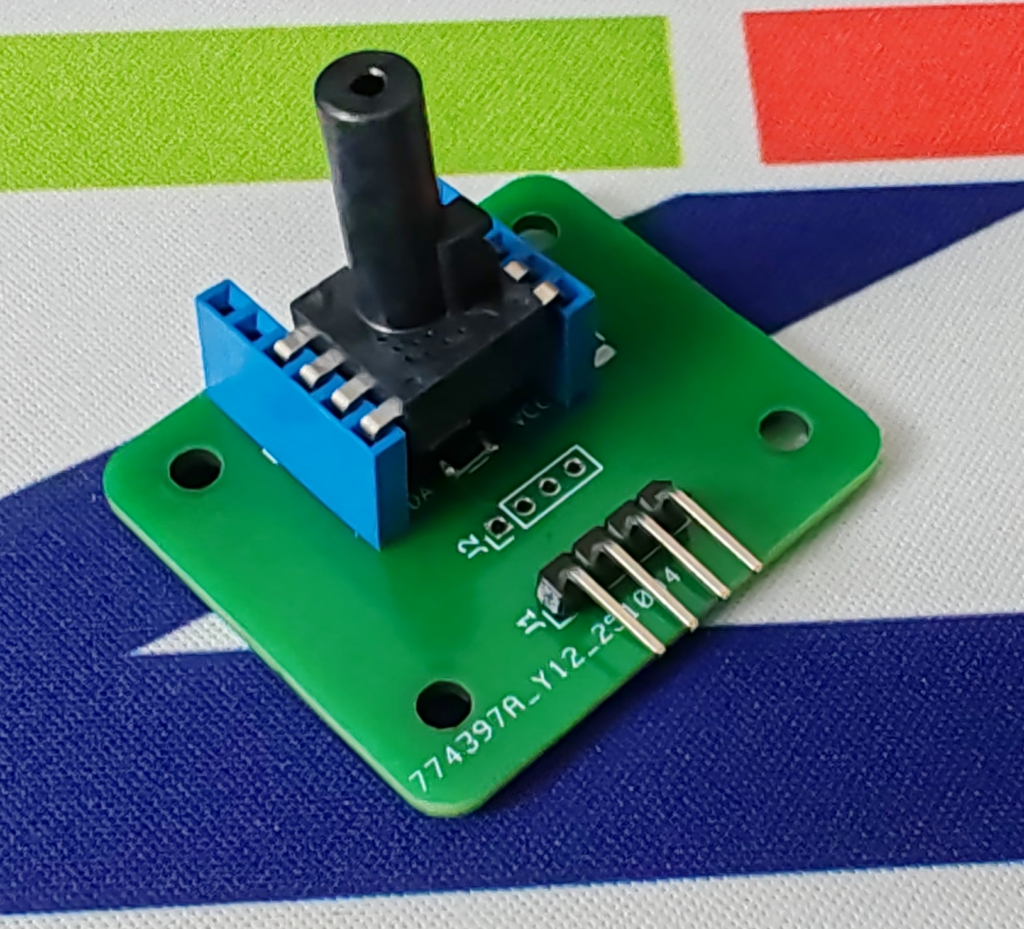
5、焊接与调试
为了便于使用,焊接了 2.54mm 排母,方便插拔测试。
三、开发过程中遇到的问题与解决方式
为了方便的进行调试,我使用了一款国产开源逻辑分析仪:章鱼哥出品的 PX logic 逻辑分析仪

这款逻辑分析仪主打高速采集,性能指标如下:
•最大32通道逻辑分析仪
•buff模式最大支持8ch@1G,总带宽8G,存储深度4Gbits
•usb3.0下stream最大2ch@1G,总带宽2G,存储深度1024Gbits
•采样usb3.0进行传输,兼容usb2.0
•输入采样阈值0-6v可调
•开源解码协议库200+,使用python进行开发,可自行开发编写
硬件核心部分采用国产器件:
- USB3.0 Phy 采用南京沁恒微的WCH569W
- FPGA采用国产FPGA 紫光同创PGL22G
其中的 Buffer 模式意思是:内部自带了缓冲,可以将采集的信号直接传输存储在内部,存储多少数据取决于当前采样数量居和板载内存的大小;Stream的意思是随时将当前采样到的数据发送到电脑上,理论上只要你的电脑性能足够,可以不停的进行采样。
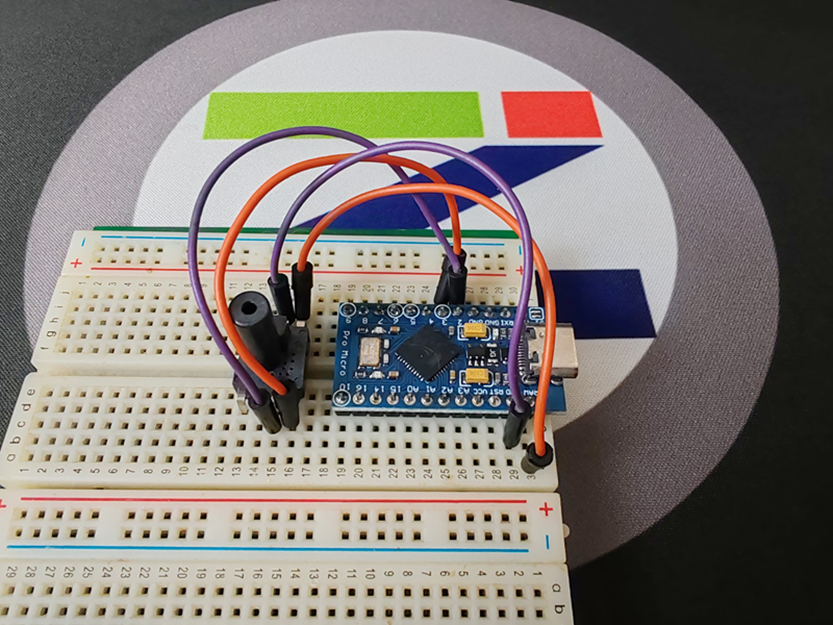
在动手之前首先在面包板上动手实验(NSPGD1M006DT04这种封装非常友好,便于实验)。这里无需额外的上拉I2C 即可工作
设置采样20秒,采样率5Mhz(I2C 400KHz, 相当于10倍采样率)
Buffer 模式,2V 阈值,只要2个通道即可抓取
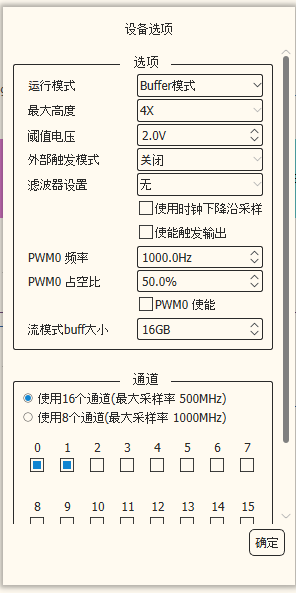
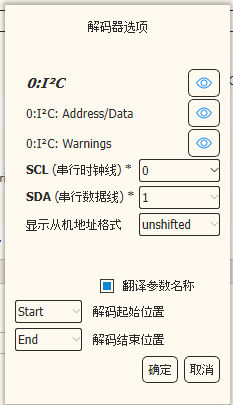
解码器选择 I2C
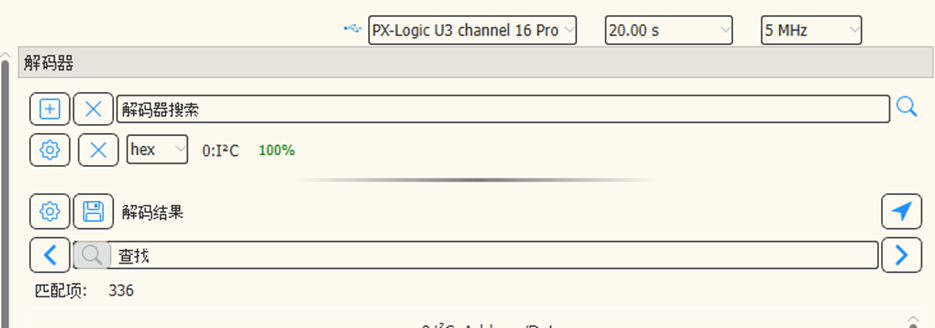
指定0 通道是 SCL, 1通道是 SDA
接下来就可以抓到结果了:
四、实现结果展示
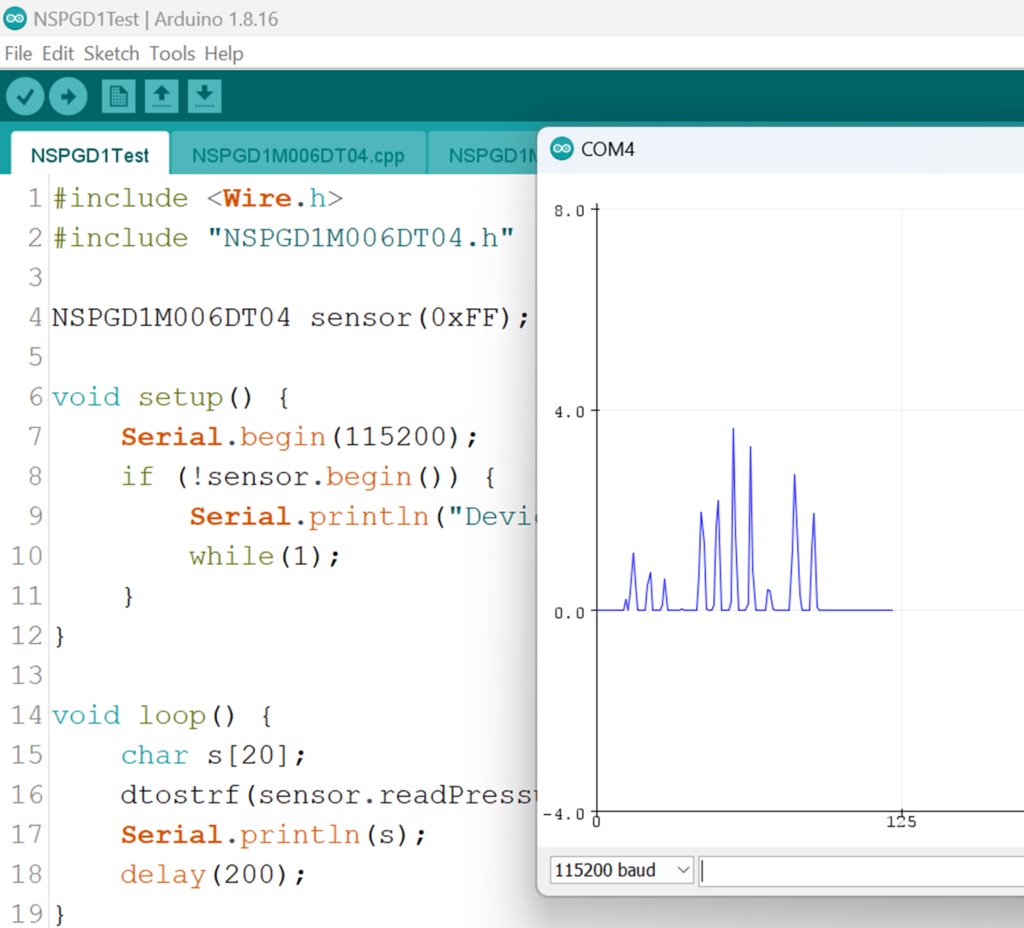
五、关键代码及说明
读取的代码数据需要和 Datasheet 上的 Demo 完成相同:
float NSPGD1M006DT04::readPressure() {
uint32_t PData;
_i2cPort->beginTransmission(_i2cAddress);
_i2cPort->write(0x30);
_i2cPort->write(0x0A);
_i2cPort->endTransmission(true);
int number = 0;
while (number < 50) {
number++;
delay(1);
//NSPGD1M006DT04_Read_Byte(0x30,Reg30);
_i2cPort->beginTransmission(_i2cAddress);
_i2cPort->write(0x30);
_i2cPort->endTransmission(false);
_i2cPort->requestFrom(_i2cAddress, 1, true);
if (_i2cPort->read() == 0x02) {
//NSPGD1M006DT04_Read_3Byte(0x06,PData);
_i2cPort->beginTransmission(_i2cAddress);
_i2cPort->write(0x06);
_i2cPort->endTransmission(false);
_i2cPort->requestFrom(_i2cAddress, 3, true);
PData = _i2cPort->read();
PData = (PData << 8) | _i2cPort->read();
PData = (PData << 8) | _i2cPort->read();
if (PData > 8388607) {
PData = PData - 16777216;
}
return (((float)PData) / 8388607 - 0.1) / 0.13333;
}
}
return 0.0;
}
取得的数值以 float 返回给调用者。
六、难点以及解决方法
在调试过程中,我发现根据文档要求,发送指令之后,一直会出现 I2C 的 NA ,无法取得设备的数据。搜索资料也无果,无奈之下继续研究Datasheet, 忽然发现它给出的例子是多次操作的,下面这一块发送 0x0A 之后,发0x30 然后尝试50次(之前上学的时候,英文会有改错的题目,其中一种不为人知的方法是将错误通过排版的方法,放在换行或者换页的地方,看到这里忽然让我想起来被这种题目支配的恐惧)
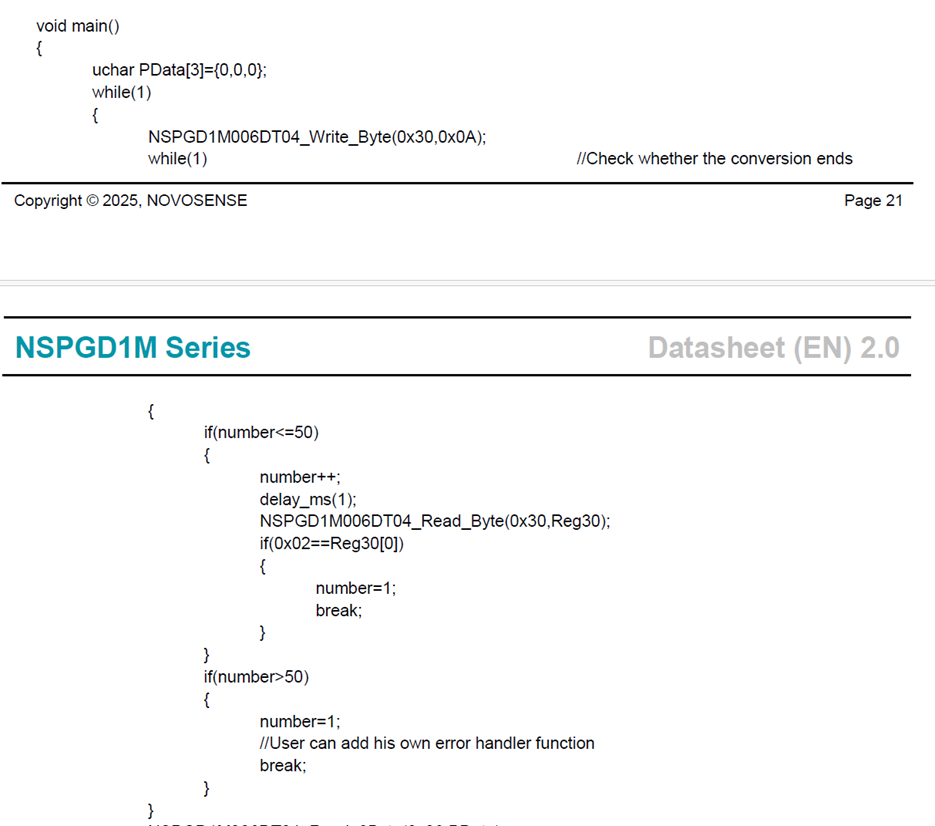
于是,我也修改代码多次读取,然后问题就解决了。总结下来之前碰到问题的原因是:
- 为了便于调试,只尝试一次;
- 代码中间隔2秒才进行一次尝试;
- 我逻辑分析仪设置采样20秒,通常我也只会观察20秒;
修改库函数,多尝试问题就解决了。
==================================================
本项目是参考电子森林的活动项目,原始链接在 https://www.eetree.cn/project/4719
在线取得 EFI 文件中文本的工具
在 https://convert.guru/converter 提供了一个在线工具,能够解析出来 EFI 文件中的文本字符串。
用法非常简单,把EFI 文件拖拽上去即可解析,比如,我使用手边的 EFI 测试如下:
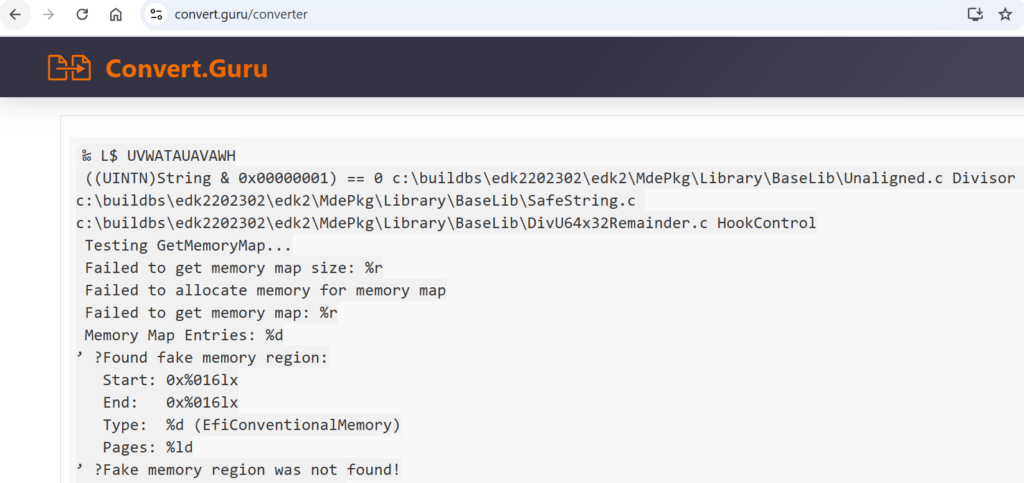
估计这个工具是用来方便进行EFI 破解的吧?
给 7Z 增加解压后打开目录的功能
修改 7Zip CPP\7zip\UI\GUI\ExtractGUI.cpp ExtractGUI() 函数,在末尾增加一段代码:
extracter.ArchivePaths = &archivePaths;
extracter.ArchivePathsFull = &archivePathsFull;
extracter.WildcardCensor = &wildcardCensor;
extracter.Options = &options;
#ifndef Z7_SFX
extracter.HashBundle = hb;
#endif
extracter.IconID = IDI_ICON;
RINOK(extracter.Create(title, hwndParent))
messageWasDisplayed = extracter.ThreadFinishedOK && extracter.MessagesDisplayed;
//LAB-Z_Debug_Start
if (extracter.Result == S_OK && !options.TestMode && !options.OutputDir.IsEmpty())
{
FString outputDir = options.OutputDir;
NName::NormalizeDirPathPrefix(outputDir);
ShellExecute(NULL, L"explore", fs2us(outputDir), NULL, NULL, SW_SHOWNORMAL);
}
//LAB-Z_Debug_End
return extracter.Result;
}
重新编译,之后将编译生成的 7zG.exe 拷贝覆盖到之前的 7z 安装目录下,使用右键解压的时候就能自动打开解压目录了。
修改后的代码:
基于26.01 源代码修改后编译生成的 7zG.exe:
Step to UEFI (306)JPEG 图片转PPM 程序
这次带来的是一个 Jpeg图片Decode 工具,和之前的显示 Jpeg图片工具类似。相关代码来自 https://github.com/xbarin02/jpeg 项目。修正了一些 UEFI 下的编译问题,主要有:
- EDK2 没有提供 roundf()/sqrtf()/cosf()函数,解决方法是通过下面的调用内部的其他函数。
float sqrtf(float x) {
return sqrt(x);
}
float cosf(float x) {
return cos(x);
}
float roundf(float x) {
if (x >= 0.0f) {
return (float)(INT32)(x + 0.5f);
} else {
return (float)(INT32)(x - 0.5f);
}
}
- 源代码中设用了 PRIu16/SCNu16/PRIu8 这样的宏定义,编译时会出现错误。对应的都使用手工方式进行了修改。
最终,完整的主程序decoder.c:
#include <stddef.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <inttypes.h>
#include <assert.h>
#include "common.h"
#include "io.h"
#include "huffman.h"
#include "coeffs.h"
#include "imgproc.h"
#include "frame.h"
#include <inttypes.h>
const char *Pq_to_str[] = {
[0] = "8-bit",
[1] = "16-bit"
};
/* B.2.4.1 Quantization table-specification syntax */
int parse_qtable(FILE *stream, struct context *context)
{
int err;
uint8_t Pq, Tq;
struct qtable *qtable;
assert(context != NULL);
err = read_nibbles(stream, &Pq, &Tq);
RETURN_IF(err);
if (Tq >= 4) {
/* invalid value */
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Tq < 4);
assert(Pq < 2);
//printf("Pq = %" PRIu8 " (%s), Tq = %" PRIu8 " (QT identifier)\n", Pq, Pq_to_str[Pq], Tq);
qtable = &context->qtable[Tq];
/* precision */
qtable->Pq = Pq;
for (int i = 0; i < 64; ++i) {
if (Pq == 0) {
uint8_t byte;
err = read_byte(stream, &byte);
RETURN_IF(err);
qtable->Q[zigzag[i]] = (uint16_t)byte;
} else {
uint16_t word;
err = read_word(stream, &word);
RETURN_IF(err);
qtable->Q[zigzag[i]] = word;
}
}
for (int y = 0; y < 8; ++y) {
for (int x = 0; x < 8; ++x) {
//printf("%3" PRIu16 " ", qtable->Q[y * 8 + x]);
}
printf("\n");
}
return RET_SUCCESS;
}
int parse_frame_header(FILE *stream, struct context *context)
{
int err;
/* Sample precision */
uint8_t P;
/* Number of lines, Number of samples per line */
uint16_t Y, X;
/* Number of image components in frame */
uint8_t Nf;
assert(context != NULL);
err = read_byte(stream, &P);
RETURN_IF(err);
err = read_word(stream, &Y);
RETURN_IF(err);
err = read_word(stream, &X);
RETURN_IF(err);
err = read_byte(stream, &Nf);
RETURN_IF(err);
assert(X > 0);
assert(Nf > 0);
//printf("P = %" PRIu8 " (Sample precision), Y = %" PRIu16 ", X = %" PRIu16 ", Nf = %" PRIu8 " (Number of image components)\n", P, Y, X, Nf);
/* precision */
context->P = P;
context->Y = Y;
context->X = X;
/* components */
context->Nf = Nf;
uint8_t max_H = 0, max_V = 0;
for (int i = 0; i < Nf; ++i) {
uint8_t C;
uint8_t H, V;
uint8_t Tq;
err = read_byte(stream, &C);
RETURN_IF(err);
err = read_nibbles(stream, &H, &V);
RETURN_IF(err);
err = read_byte(stream, &Tq);
RETURN_IF(err);
//printf("C = %" PRIu8 " (Component identifier), H = %" PRIu8 ", V = %" PRIu8 ", Tq = %" PRIu8 " (QT identifier)\n", C, H, V, Tq);
context->component[C].H = H;
context->component[C].V = V;
context->component[C].Tq = Tq;
max_H = (H > max_H) ? H : max_H;
max_V = (V > max_V) ? V : max_V;
}
context->max_H = max_H;
context->max_V = max_V;
err = compute_no_blocks_and_alloc_buffers(context);
RETURN_IF(err);
return RET_SUCCESS;
}
const char *Tc_to_str[] = {
[0] = "DC",
[1] = "AC"
};
int parse_huffman_tables(FILE *stream, struct context *context)
{
int err;
uint8_t Tc, Th;
assert(context != NULL);
err = read_nibbles(stream, &Tc, &Th);
RETURN_IF(err);
if (Tc >= 2) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Tc < 2);
//printf("Tc = %" PRIu8 " (%s table) Th = %" PRIu8 " (HT identifier)\n", Tc, Tc_to_str[Tc], Th);
struct htable *htable = &context->htable[Tc][Th];
for (int i = 0; i < 16; ++i) {
err = read_byte(stream, &htable->L[i]);
RETURN_IF(err);
}
for (int i = 0; i < 16; ++i) {
uint8_t L = htable->L[i];
for (int l = 0; l < L; ++l) {
err = read_byte(stream, &htable->V[i][l]);
RETURN_IF(err);
}
}
/* Annex C */
struct hcode *hcode = &context->hcode[Tc][Th];
err = conv_htable_to_hcode(htable, hcode);
RETURN_IF(err);
return RET_SUCCESS;
}
struct scan {
uint8_t Ns;
uint8_t Cs[256];
/* useful to remove differential DC coding
*
* At the beginning of the scan and at the beginning of each restart interval, the prediction for the DC coefficient prediction
* is initialized to 0. */
struct int_block *last_block[256];
};
int parse_scan_header(FILE *stream, struct context *context, struct scan *scan)
{
int err;
/* Number of image components in scan */
uint8_t Ns;
err = read_byte(stream, &Ns);
RETURN_IF(err);
//printf("Ns = %" PRIu8 " (Number of image components in scan)\n", Ns);
assert(scan != NULL);
scan->Ns = Ns;
for (int j = 0; j < Ns; ++j) {
uint8_t Cs;
uint8_t Td, Ta;
err = read_byte(stream, &Cs);
RETURN_IF(err);
err = read_nibbles(stream, &Td, &Ta);
RETURN_IF(err);
//printf("Cs%i = %" PRIu8 " (Component identifier), Td%i = %" PRIu8 " (DC HT identifier), Ta%i = %" PRIu8 " (AC HT identifier)\n", j, Cs, j, Td, j, Ta);
scan->Cs[j] = Cs;
context->component[Cs].Td = Td;
context->component[Cs].Ta = Ta;
}
uint8_t Ss;
uint8_t Se;
uint8_t Ah, Al;
err = read_byte(stream, &Ss);
RETURN_IF(err);
err = read_byte(stream, &Se);
RETURN_IF(err);
err = read_nibbles(stream, &Ah, &Al);
RETURN_IF(err);
if (Ss != 0 || Se != 63) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Ss == 0);
assert(Se == 63);
//printf("Ss = %" PRIu8 " (the first DCT coefficient), Se = %" PRIu8 " (the last DCT coefficient)\n", Ss, Se);
if (Ah != 0 || Al != 0) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Ah == 0);
assert(Al == 0);
//printf("Ah = %" PRIu8 " (bit position high), Al = %" PRIu8 " (bit position low)\n", Ah, Al);
context->mblocks = 0;
return RET_SUCCESS;
}
/* read MCU */
int read_macroblock(struct bits *bits, struct context *context, struct scan *scan)
{
int err;
assert(scan != NULL);
assert(context != NULL);
size_t seq_no = context->mblocks;
if (scan->Ns == 0) {
/* nothing to do */
return RET_FAILURE_NO_MORE_DATA;
} else if (scan->Ns == 1) {
/* A.2.2 Non-interleaved order (Ns = 1) */
assert(scan->Ns == 1);
uint8_t Cs = scan->Cs[0];
uint8_t H = context->component[Cs].H;
uint8_t V = context->component[Cs].V;
size_t blocks_in_mb = H * V;
for (size_t w = 0; w < blocks_in_mb; ++w) {
size_t block_x = (blocks_in_mb * seq_no + w) % context->component[Cs].b_x;
size_t block_y = (blocks_in_mb * seq_no + w) / context->component[Cs].b_x;
size_t block_seq = block_y * context->component[Cs].b_x + block_x;
struct int_block *int_block = &context->component[Cs].int_buffer[block_seq];
/* read block */
err = read_block(bits, context, Cs, int_block);
RETURN_IF(err);
if (scan->last_block[Cs] != NULL) {
int_block->c[0] += scan->last_block[Cs]->c[0];
}
scan->last_block[Cs] = int_block;
}
} else {
assert(scan->Ns > 1);
if (context->m_x == 0) {
/* missing SOF before SOS? */
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(context->m_x != 0);
size_t x = seq_no % context->m_x;
size_t y = seq_no / context->m_x;
// printf("[DEBUG] reading macroblock... x=%zu y=%zu\n", x, y);
/* for each component */
for (int j = 0; j < scan->Ns; ++j) {
uint8_t Cs = scan->Cs[j];
uint8_t H = context->component[Cs].H;
uint8_t V = context->component[Cs].V;
// printf("[DEBUG] reading component %" PRIu8 " blocks @ x=%zu y=%zu\n", Cs, x * H, y * V);
/* for each 8x8 block */
for (int v = 0; v < V; ++v) {
for (int h = 0; h < H; ++h) {
size_t block_x = x * H + h;
size_t block_y = y * V + v;
assert(block_x < context->component[Cs].b_x);
size_t block_seq = block_y * context->component[Cs].b_x + block_x;
// printf("[DEBUG] reading component %" PRIu8 " blocks @ x=%zu y=%zu out of X=%zu Y=%zu\n", Cs, x * H + h, y * V + v, context->component[Cs].b_x, context->component[Cs].b_y);
// printf("[DEBUG] reading component %" PRIu8 " block# %zu out of %zu\n", Cs, block_seq, context->component[Cs].b_x * context->component[Cs].b_y);
struct int_block *int_block = &context->component[Cs].int_buffer[block_seq];
/* past the end of data? */
if (block_seq >= context->component[Cs].b_x * context->component[Cs].b_y) {
int_block = NULL;
}
/* read block */
err = read_block(bits, context, Cs, int_block);
RETURN_IF(err);
/* remove differential DC coding */
if (scan->last_block[Cs] != NULL) {
int_block->c[0] += scan->last_block[Cs]->c[0];
}
scan->last_block[Cs] = int_block;
}
}
}
}
return RET_SUCCESS;
}
int read_ecs(FILE *stream, struct context *context, struct scan *scan)
{
int err;
struct bits bits;
init_bits(&bits, stream);
for (int i = 0; i < 256; ++i) {
scan->last_block[i] = NULL;
}
/* loop over macroblocks */
do {
err = read_macroblock(&bits, context, scan);
if (err == RET_FAILURE_NO_MORE_DATA)
goto end;
RETURN_IF(err);
context->mblocks++;
} while (1);
end:
printf("Processed: %zu macroblocks\n", context->mblocks);
return RET_SUCCESS;
}
int parse_restart_interval(FILE *stream, struct context *context)
{
int err;
uint16_t Ri;
err = read_word(stream, &Ri);
RETURN_IF(err);
context->Ri = Ri;
return RET_SUCCESS;
}
int parse_comment(FILE *stream, uint16_t len)
{
if (len < 2) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(len >= 2);
size_t l = len - 2;
char *buf = malloc(l + 1);
if (buf == NULL) {
return RET_FAILURE_MEMORY_ALLOCATION;
}
if (fread(buf, sizeof(char), l, stream) != l) {
free(buf);
return RET_FAILURE_FILE_IO;
}
buf[l] = 0;
printf("%s\n", buf);
free(buf);
return RET_SUCCESS;
}
int write_image(struct context *context, const char *path)
{
int err;
struct frame frame;
err = frame_create(context, &frame);
RETURN_IF(err);
err = frame_to_rgb(&frame);
if (err) {
goto end;
}
err = write_frame(&frame, path);
end:
frame_destroy(&frame);
return err;
}
int epilogue(struct context *context, const char *path)
{
int err;
err = dequantize(context);
RETURN_IF(err);
err = inverse_dct(context);
RETURN_IF(err);
err = conv_blocks_to_frame(context);
RETURN_IF(err);
err = write_image(context, path);
RETURN_IF(err);
return RET_SUCCESS;
}
int parse_format(FILE *stream, struct context *context, const char *path)
{
int err;
struct scan scan;
// init
scan.Ns = 0;
while (1) {
uint16_t marker;
err = read_marker(stream, &marker);
RETURN_IF(err);
/* An asterisk (*) indicates a marker which stands alone,
* that is, which is not the start of a marker segment. */
switch (marker) {
uint16_t len;
long pos;
/* SOI* Start of image */
case 0xffd8:
printf("SOI\n");
break;
/* APPn */
case 0xffe0:
case 0xffe1:
case 0xffe2:
case 0xffe3:
case 0xffe4:
case 0xffe5:
case 0xffe6:
case 0xffe7:
case 0xffe8:
case 0xffeb:
case 0xffec:
case 0xffed:
case 0xffee:
printf("APP%i\n", marker & 0xf);
err = read_length(stream, &len);
RETURN_IF(err);
err = skip_segment(stream, len);
RETURN_IF(err);
break;
/* DQT Define quantization table(s) */
case 0xffdb:
printf("DQT\n");
pos = ftell(stream);
err = read_length(stream, &len);
RETURN_IF(err);
do {
err = parse_qtable(stream, context);
RETURN_IF(err);
} while (ftell(stream) < pos + len);
break;
/* SOF0 Baseline DCT */
case 0xffc0:
printf("SOF0\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
break;
/* SOF1 Extended sequential DCT */
case 0xffc1:
printf("SOF1\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
break;
/* SOF2 Progressive DCT */
case 0xffc2:
printf("SOF2\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Progressive DCT not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* SOF3 Lossless (sequential) */
case 0xffc3:
printf("SOF3\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Lossless JPEG not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* SOF9 Extended sequential DCT (arithmetic coding) */
case 0xffc9:
printf("SOF9\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Arithmetic coding not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* SOF10 Progressive DCT (arithmetic coding) */
case 0xffca:
printf("SOF10\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Arithmetic coding not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* DHT Define Huffman table(s) */
case 0xffc4:
printf("DHT\n");
pos = ftell(stream);
err = read_length(stream, &len);
RETURN_IF(err);
/* parse multiple tables in single DHT */
do {
err = parse_huffman_tables(stream, context);
RETURN_IF(err);
} while (ftell(stream) < pos + len);
break;
/* SOS Start of scan */
case 0xffda:
printf("SOS\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_scan_header(stream, context, &scan);
RETURN_IF(err);
err = read_ecs(stream, context, &scan);
RETURN_IF(err);
break;
/* EOI* End of image */
case 0xffd9:
printf("EOI\n");
pos = ftell(stream);
fseek(stream, 0, SEEK_END);
if (ftell(stream) - pos > 0) {
printf("*** %li bytes of garbage ***\n", ftell(stream) - pos);
}
err = epilogue(context, path);
RETURN_IF(err);
return RET_SUCCESS;
/* DRI Define restart interval */
case 0xffdd:
printf("DRI\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_restart_interval(stream, context);
RETURN_IF(err);
break;
/* RSTm* Restart with modulo 8 count “m” */
case 0xffd0:
case 0xffd1:
case 0xffd2:
case 0xffd3:
case 0xffd4:
case 0xffd5:
case 0xffd6:
case 0xffd7:
printf("RST%i\n", marker & 0xf);
err = read_ecs(stream, context, &scan);
RETURN_IF(err);
break;
/* COM Comment */
case 0xfffe:
printf("COM\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_comment(stream, len);
RETURN_IF(err);
break;
/* TEM* For temporary private use in arithmetic coding */
case 0xff01:
printf("TEM\n");
break;
/* DAC Define arithmetic coding conditioning(s) */
case 0xffcc:
printf("DAC\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = skip_segment(stream, len);
RETURN_IF(err);
break;
default:
//fprintf(stderr, "unhandled marker 0x%" PRIx16 "\n", marker);
return RET_FAILURE_FILE_UNSUPPORTED;
}
}
}
int process_jpeg_stream(FILE *stream, const char *path)
{
int err;
struct context *context = malloc(sizeof(struct context));
if (context == NULL) {
fprintf(stderr, "malloc failure\n");
return RET_FAILURE_MEMORY_ALLOCATION;
}
err = init_context(context);
if (err) {
goto end;
}
err = parse_format(stream, context, path);
end:
free_buffers(context);
free(context);
return err;
}
int process_jpeg_file(const char *i_path, const char *o_path)
{
FILE *stream = fopen(i_path, "r");
if (stream == NULL) {
fprintf(stderr, "fopen failure\n");
return RET_FAILURE_FILE_OPEN;
}
int err = process_jpeg_stream(stream, o_path);
fclose(stream);
return err;
}
int main(int argc, char *argv[])
{
const char *i_path = argc > 1 ? argv[1] : "Lenna.jpg";
const char *o_path = argc > 2 ? argv[2] : NULL;
int err = process_jpeg_file(i_path, o_path);
if (err) {
printf("Failure.\n");
return 1;
}
printf("Success.\n");
return 0;
}
编译完成后,在模拟器中进行测试。首先运行一下 JPG2PPM.EFI,它会将Lenna.jpg 转为为 Test.ppm。
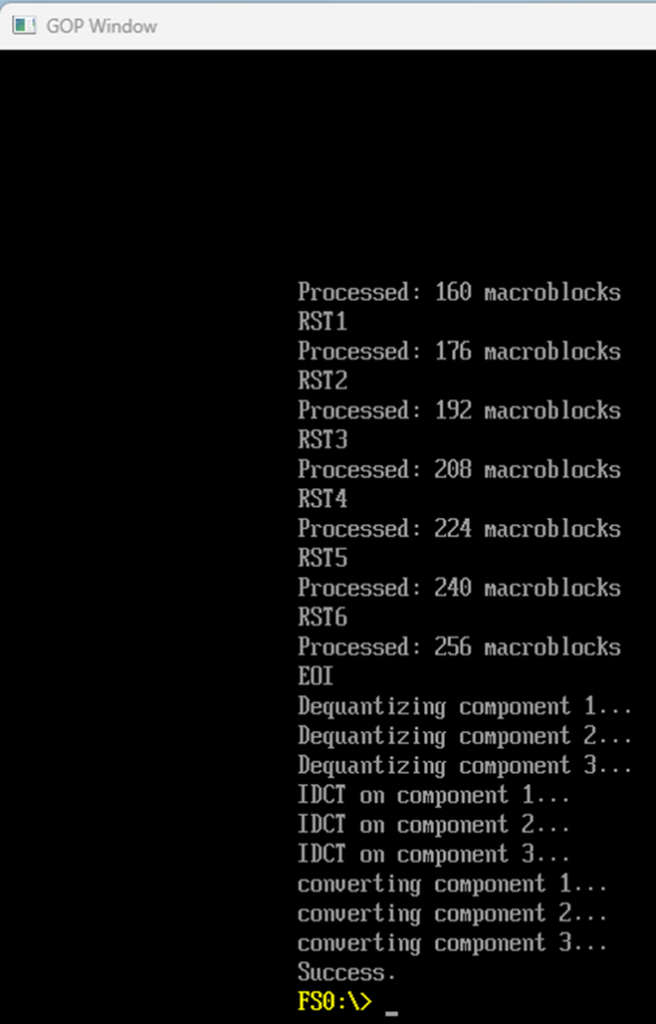
接下来,运行 ppmdemo.efi output.ppm 即可看到转换后的结果:
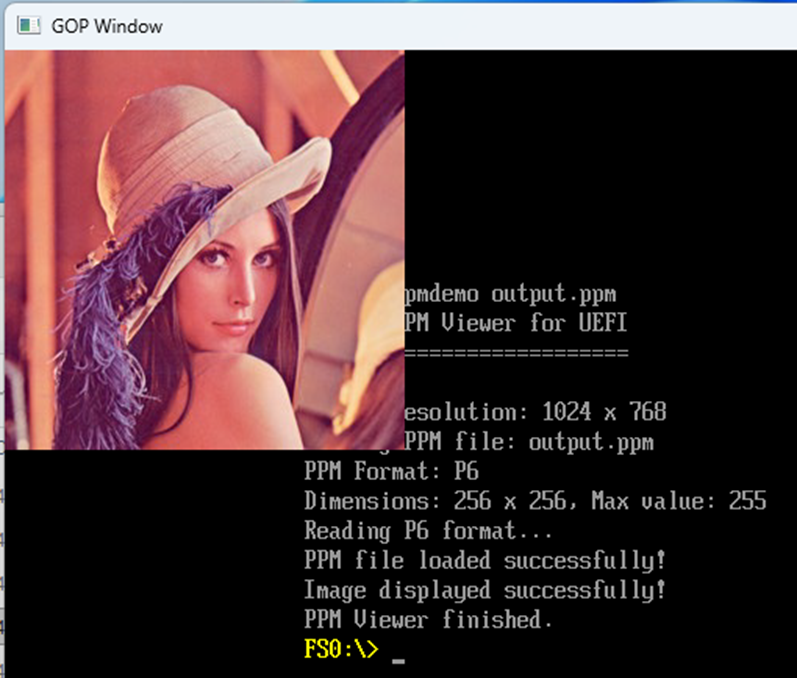
有兴趣的朋友可以试试。
完整的代码如下:
USB 调频收音机
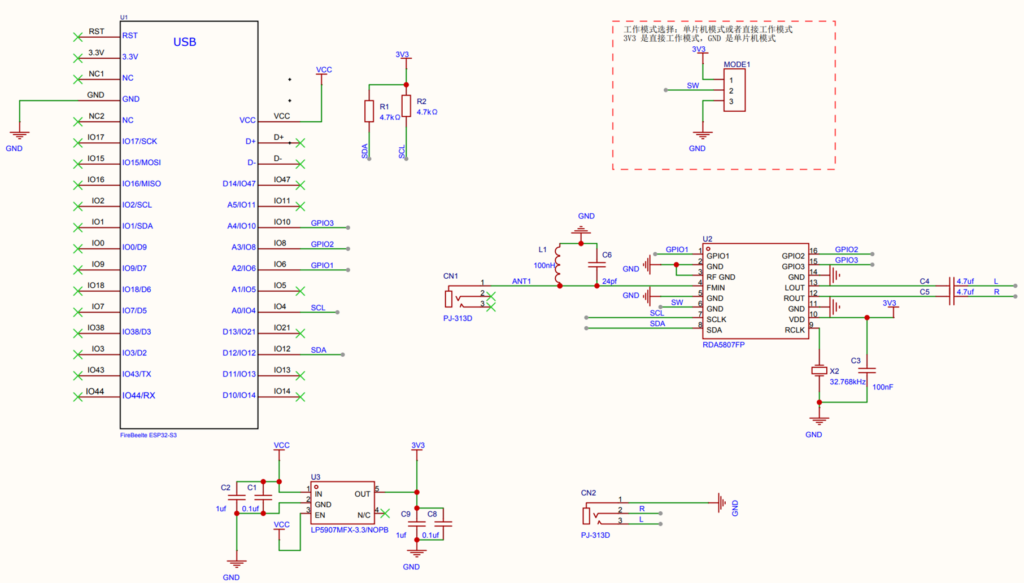
之前在使用 RDA5807FP制作收音机的时候【参考1】曾经注意到,芯片提供了 I2S输出。因此,这次同样使用这个芯片制作一个将收到的信号通过USB传输到电脑中的设备。
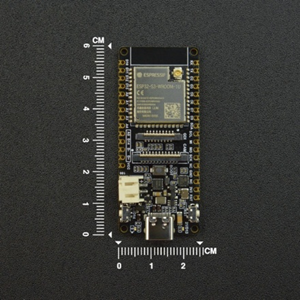
设计上使用DFRobot出品的FireBeetle 2 Board ESP32-S3-U作为主控。其中的核心芯片是 ESP32 S3 带有 USB Device的功能,我们通过代码将它模拟为USB麦克风,插入电脑后无需驱动即可直接使用。此外,芯片还模拟出一个 USB 串口,用于主机发送例如选台之类的命令。
硬件非常简单,但是细节很多(前后打了三版)。总结下来需要注意的有如下几点:
- RDA5807FP 芯片有假货,我最开始买的装上之后只有沙沙声无法收到电台。最后咨询了B站网友“我是电视电视迷”,他推荐我在“深圳市义胜电子网店”购买了,工作正常;
- RDA5807FP芯片有两个工作模式:直接工作模式和单片机模式。前者是意思是上电之后芯片会根据 Pin7 和 Pin8 调整频率,Pin15和Pin16 调整音量;后者的意思是上电后需要使用单片机从 I2C 通讯来控制。但是,这个模式切换引脚在 Datasheet上是标记为 GND 的隐藏起来的。
- 供电部分使用了LP5907MFX-3.3,主要是为了降低电源噪音;
- 对于接收信号影响最大的是天线部分,这次的设计将天线和耳机分开两个接口。二者是可以放在一起的,耳机的地线作为天线使用,效果也非常不错。当使用耳机作为天线的时候,耳机仍然能够正常工作。
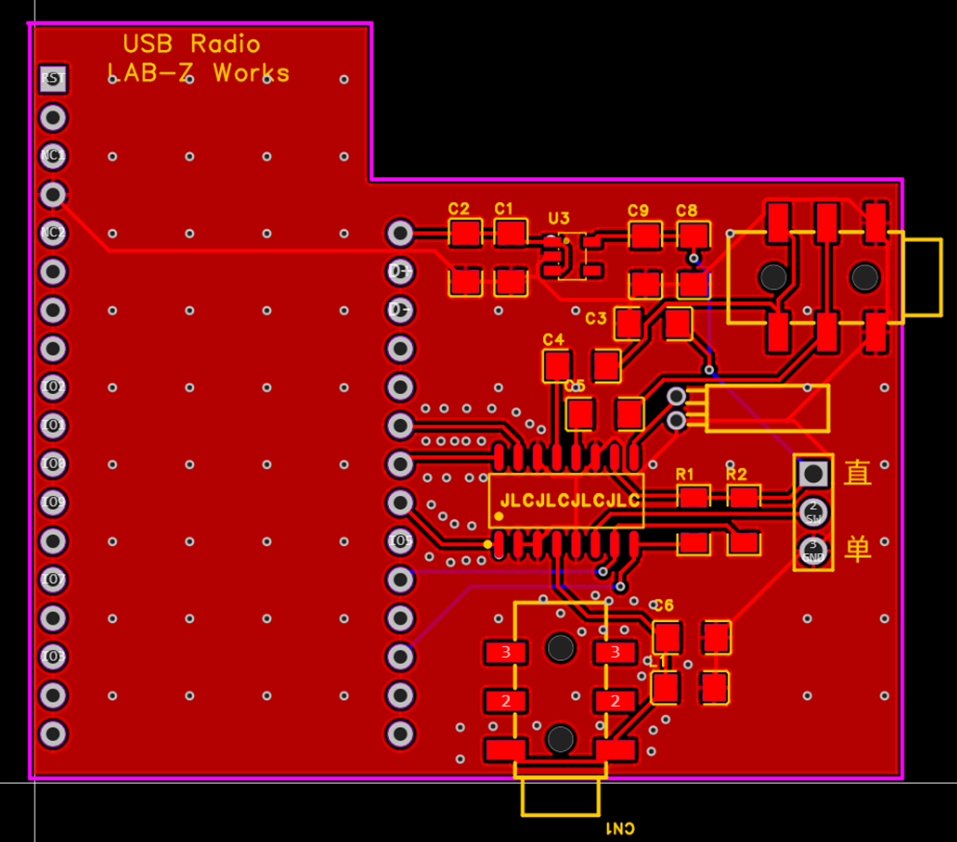
- PCB 布线需要特别注意:不要在芯片底部走线,会影响效果。
最终电路图如下,可以看到设计上非常简单,左侧是一个2.54mm座子,右侧是 RDA芯片:
PCB设计如下:
最终焊接后的成品如下:
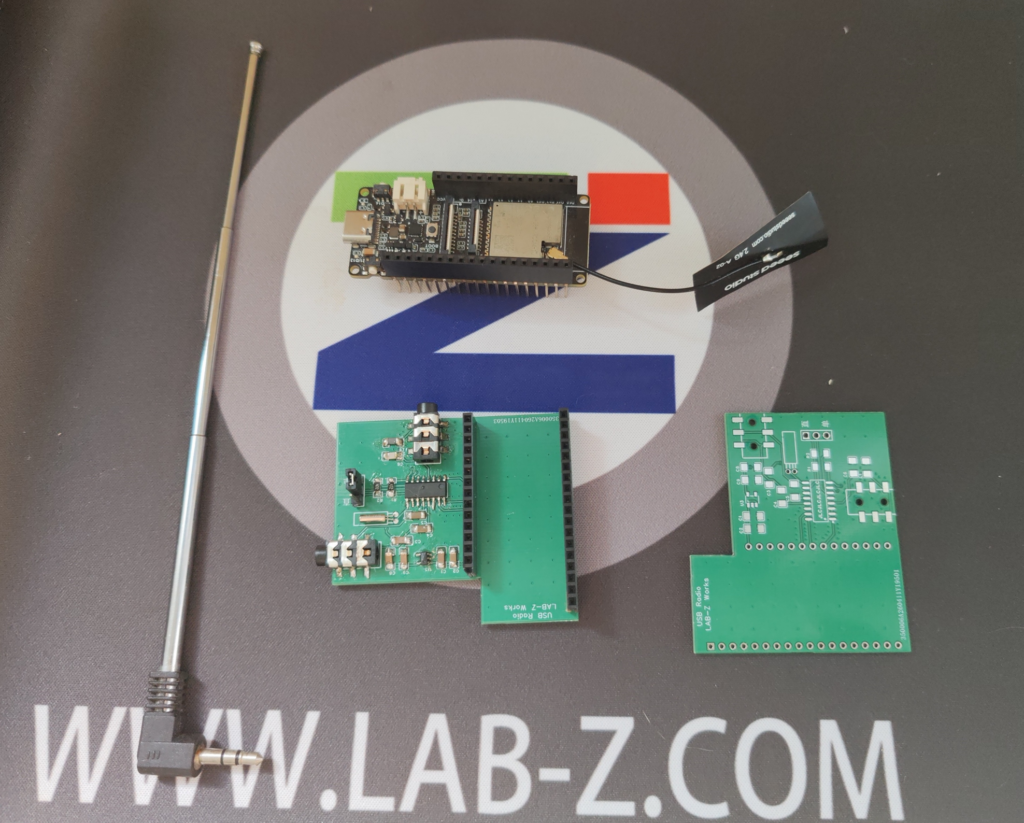
拿到PCB 后,先进行简单的焊接,不要连接FireBeetle板子,将跳线跳到直接工作模式后,从外部引入5V 供电即可在耳机中听到沙沙声,如果没有声音请检查RDA5807FP焊接特别是供电部分。之后,将 SCL 或者SDA 引脚短暂接地,这样能够启动RDA5807FP的自动搜台功能,如果无法搜索到任何频道,请检查天线部分。
接下来进行代码设计。为了实现USB 麦克风,这里使用 CherryUSB 框架,CherryUSB 是一款国产的小而美的、可移植性高的、用于嵌入式系统的 USB 主从协议栈。
1.创建一个 USB 麦克风,对于 CherryUSB 来说,已经准备好了大部分的代码,只需要下面设定描述符之类的动作即可
usbd_desc_register(busid, cdc_audio_v1_descriptor);
usbd_add_interface(busid, usbd_audio_init_intf(busid, &intf0, 0x0100, audio_entity_table, 1));
usbd_add_interface(busid, usbd_audio_init_intf(busid, &intf1, 0x0100, audio_entity_table, 1));
usbd_add_endpoint(busid, &audio_in_ep);
usbd_initialize(busid, reg_base, usbd_event_handler);
2.创建一个USB 串口(USB CDC)
usbd_add_interface(busid, usbd_cdc_acm_init_intf(busid, &intf2));
usbd_add_interface(busid, usbd_cdc_acm_init_intf(busid, &intf3));
usbd_add_endpoint(busid, &cdc_out_ep);
usbd_add_endpoint(busid, &cdc_in_ep);
3.初始化RDA5807 (初始化使用 I2S 输出音频之后,仍然能够在耳机输出口听到音频输出,这对于调试帮助很大)。初始化使用 I2S 输出之后仍然能够在耳机插孔中听到接收到的声音,这样对于调试非常有帮助。
void FMInit() {
i2c_master_init(&bus_handle, &dev_handle);
rda_reg02 rda2;
rda2.raw = 0;
rda2.refined.NEW_METHOD = 0;
rda2.refined.RDS_EN = 0;
rda2.refined.CLK_MODE = 0;
rda2.refined.RCLK_DIRECT_IN = 0;
rda2.refined.NON_CALIBRATE = 0;
rda2.refined.MONO = 0;
rda2.refined.DMUTE = 1;
rda2.refined.DHIZ = 1;
rda2.refined.ENABLE = 1;
rda2.refined.BASS = 1;
rda2.refined.SEEK = 0;
writeRegister(0x02, rda2.raw);
rda_reg05 rda5;
rda5.raw = 0x00;
rda5.refined.INT_MODE = 0;
rda5.refined.LNA_PORT_SEL = 2;
rda5.refined.LNA_ICSEL_BIT = 0;
rda5.refined.SEEKTH = 8;
rda5.refined.VOLUME = 0;
writeRegister(0x05, rda5.raw);
vTaskDelay(pdMS_TO_TICKS(500)); // 必须的
ESP_LOGI(TAG, "Reg04: %X",readRegister(0x04));
ESP_LOGI(TAG, "Reg06: %X",readRegister(0x06));
uint16_t reg04 = readRegister(0x04);
reg04 |= (1 << 6); //I2S_ENABLED
writeRegister(0x04, reg04);
uint16_t reg06 = readRegister(0x06);
reg06 |= (1 << 12)|(1<<9); //I2S_MODE == Slave Mode
writeRegister(0x06, reg06);
ESP_LOGI(TAG,"Reg06: %X\n", readRegister(0x06));
ESP_LOGI(TAG, "Reg04: %X\n",readRegister(0x04));
ESP_LOGI(TAG, "Reg06: %X\n",readRegister(0x06));
vTaskDelay(pdMS_TO_TICKS(500)); // 必须的
setFreq(10170); // 设置频率为101.7MHz
}
上面涉及到的寄存器可以在 RDA5807 手册上查到。
4.获得I2S数据的代码,获得数据之后会放置在一个 Ring Buffer 中,这样的设计可以尽量让代码并行处理
void task_func(void *arg)
{
i2c_mic_rx_data_t rx_data;
while (1)
{
{
size_t out_len = 0;
rx_data.buffer = malloc(AUDIO_IN_PACKET);
rx_data.size = AUDIO_IN_PACKET;
i2s_channel_read(rx_handle, rx_data.buffer, rx_data.size, &out_len, 10);
// 将数据放入队列
if (xQueueSend(s_receive_queue, &rx_data, portMAX_DELAY) != pdTRUE) {
USB_LOG_RAW("Send2 Err %x\n",rx_data.buffer);
}
}
}
vTaskDelete(NULL);
}
5.处理USB 串口收到的数据代码。特别注意,收到的数据不可以立即处理,因为需要通过 I2C 对RDA5807FP 发送数据,耗时较长阻塞整个程序。
void usbd_cdc_acm_bulk_out(uint8_t busid, uint8_t ep, uint32_t nbytes)
{
USB_LOG_RAW(TAG,"actual out len:%d\r\n", nbytes);
if ((nbytes==0x05)&&(read_buffer[0]=='S')) {
write_buffer[0]='S';write_buffer[1]='t';write_buffer[2]=read_buffer[1];
if (read_buffer[1] == '1') {
i2ccmd=1;
} else if (read_buffer[1] == '2') {
i2ccmd=2;
} else if (read_buffer[1] == '3') {
i2ccmd=3;
} else if (read_buffer[1] == '4') {
i2ccmd=4;
} else if (read_buffer[1] == '5') {
i2ccmd=5;
} else if (read_buffer[1] == '6') {
i2ccmd=6;
} else if (read_buffer[1] == '7') {
i2ccmd=7;
} else if (read_buffer[1] == '8') {
i2ccmd=8;
} else if (read_buffer[1] == '9') {
i2ccmd=9;
} else if (read_buffer[1] == 'a') {
i2ccmd=0x0a;
} else {
write_buffer[0]='U';write_buffer[1]='N';write_buffer[2]='W';
}
cdc_ep_tx_busy_flag = true;
usbd_ep_start_write(busid, CDC_IN_EP, write_buffer, 3);
} else {
// 将接收到的数据复制到发送缓冲区
memcpy(write_buffer, read_buffer, nbytes);
// 启动数据发送(回环)
cdc_ep_tx_busy_flag = true;
usbd_ep_start_write(busid, CDC_IN_EP, write_buffer, nbytes);
}
/* setup next out ep read transfer */
usbd_ep_start_read(busid, CDC_OUT_EP, read_buffer, 2048);
}
6.从设备向主机发送音频数据
// 没有数据,提前接收,准备好数据
if (0 == rx_data.size)
{
if (pdPASS == xQueueReceive(s_receive_queue, &rx_data, 1))
{
if (rx_data.size != 64)
{
USB_LOG_INFO("Recv %x , size=%d\n", rx_data.buffer, rx_data.size);
}
//else USB_LOG_INFO("GD");
}
else
{
rx_data.size = 0;
}
}
// 空闲循环的时候也要等待,让出CPU跑别的任务
if (0 == tx_flag)
{
stop_count++;
xSemaphoreTake(sign_tx, 1);
}
// 等待发送
if (tx_flag && rx_data.size)
{
loop_count--;
// 如果当前没有发送
if (ep_tx_busy_flag != true)
{
ep_tx_busy_flag = true;
xSemaphoreTake(sign_tx, 0);
// 发送数据到 USB
usbd_ep_start_write(0, AUDIO_IN_EP, rx_data.buffer, rx_data.size);
}
xSemaphoreTake(sign_tx, 10);
while (ep_tx_busy_flag)
{
if (tx_flag == false)
{
break;
}
}
// 发送完成,释放缓冲区
rx_data.size = 0;
free(rx_data.buffer);
}
整体代码框架是天杀帮忙设计的,可以方便的迁移到其他使用 I2S 通讯的项目中,有兴趣的朋友可以深入研究。
RDA5807FP 是上海锐迪科推出的高集成度国产 FM 收音机调谐器芯片,个人感觉可玩度很高。只需要几个外围元件即可接收播放调频广播;同时还可以通过单片机进行控制。这次更将玩法深入一步,通过USB 和计算机连接在一起。有兴趣的朋友不妨试试。
参考:
1. https://oshwhub.com/zoologist/rda5807fp-shou-yin-ji RDA5807FP收音机
工作的测试视频,测试分作两部分,一个是使用将MIC直接从喇叭播放的网页,另外一个是使用录音机录制 :
代码在 IDF 5.4 环境下编译通过。
源代码下载:
电路是立创EDA 专业版设计的,下载
Step to UEFI (305)UEFI Shell 下显示 PPM 图片的程序
PPM是Portable Pixmap Format的缩写,这是一种非常冷门儿的图片格式。它带有一个简单的 ASCII头,内部就是最原始的使用 RGB 值表示的每一个点的数据。例如,打开bell_206.ppm【参考1】,基本上可以猜到 P6 标记了图片的存储方式,258*792 是图片尺寸。

更详细的介绍可以在【参考2】看到:
每个图像文件的开头都通过2个字节「magic number」来表明文件格式的类型(PBM, PGM, PPM),以及编码方式(ASCII 或 Binary),magic number分别为P1、P2、P3、P4、P5、P6。
| Magic Number | Type | Encoding |
| P1 | Bitmap | ASCII |
| P2 | Graymap | ASCII |
| P3 | Pixmap | ASCII |
| P4 | Bitmap | Binary |
| P5 | Graymap | Binary |
| P6 | Pixmap | Binary |
ASCII格式适合人类阅读理解,可以用文本编辑器打开,读取对应图像的数据(比如PPM格式的RGB值)。 Binary格式适合机器阅读,按照二进制形式,顺序存储图像信息,不用空格分隔,所以图像处理起来更有效率,占用空间容量更少(由于缺少空格)。
下面着重讲解PPM格式:
PPM图像格式分为两部分,分别为头部分和图像数据部分。
头部分:由3部分组成,通过换行或空格进行分割,一般PPM的标准是空格。
第1部分:P3或P6,指明PPM的编码格式,
第2部分:图像的宽度和高度,通过ASCII表示,
第3部分:最大像素值,0-255字节表示。
在这三部分中,可能会有注释。注释以#开头,例如:# CREATOR: GIMP PNM Filter Version 1.1。
图像数据部分:
ASCII格式:按RGB的顺序排列,RGB中间用空格隔开,图片每一行用回车隔开。
Binary格式:PPM用24bits代表每一个像素,红绿蓝分别占用8bits。
这样看起来编写一个在 UEFI Shell 下显示 PPM 文件的代码并不复杂,最终的代码如下:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/BaseMemoryLib.h>
#include <Protocol/GraphicsOutput.h>
extern EFI_BOOT_SERVICES *gBS;
extern EFI_SYSTEM_TABLE *gST;
// PPM 图像结构
typedef struct {
int width;
int height;
int maxval;
EFI_GRAPHICS_OUTPUT_BLT_PIXEL *pixels;
} PPM_IMAGE;
// 跳过注释和空白
void skip_comments(FILE *fp) {
int c;
while ((c = fgetc(fp)) != EOF) {
if (c == '#') {
// 跳过整行注释
while ((c = fgetc(fp)) != EOF && c != '\n');
} else if (c != ' ' && c != '\t' && c != '\n' && c != '\r') {
// 非空白字符,放回去
ungetc(c, fp);
break;
}
}
}
// 读取 PPM 文件
PPM_IMAGE* load_ppm(const char *filename) {
FILE *fp;
PPM_IMAGE *img;
char magic[3];
int i, r, g, b;
printf("Loading PPM file: %s\n", filename);
fp = fopen(filename, "rb");
if (!fp) {
printf("Error: Cannot open file %s\n", filename);
return NULL;
}
// 分配图像结构
img = (PPM_IMAGE*)malloc(sizeof(PPM_IMAGE));
if (!img) {
printf("Error: Memory allocation failed\n");
fclose(fp);
return NULL;
}
// 读取魔数
if (fread(magic, 1, 2, fp) != 2) {
printf("Error: Cannot read magic number\n");
free(img);
fclose(fp);
return NULL;
}
magic[2] = '\0';
if (strcmp(magic, "P3") != 0 && strcmp(magic, "P6") != 0) {
printf("Error: Unsupported format %s (only P3 and P6 supported)\n", magic);
free(img);
fclose(fp);
return NULL;
}
printf("PPM Format: %s\n", magic);
// 跳过空白和注释
skip_comments(fp);
// 读取宽度、高度、最大值
if (fscanf(fp, "%d", &img->width) != 1 ||
fscanf(fp, "%d", &img->height) != 1 ||
fscanf(fp, "%d", &img->maxval) != 1) {
printf("Error: Cannot read image dimensions\n");
free(img);
fclose(fp);
return NULL;
}
printf("Dimensions: %d x %d, Max value: %d\n",
img->width, img->height, img->maxval);
if (img->width <= 0 || img->height <= 0 || img->maxval <= 0) {
printf("Error: Invalid image parameters\n");
free(img);
fclose(fp);
return NULL;
}
// 跳过最后的空白字符
fgetc(fp);
// 分配像素数据
img->pixels = (EFI_GRAPHICS_OUTPUT_BLT_PIXEL*)malloc(
img->width * img->height * sizeof(EFI_GRAPHICS_OUTPUT_BLT_PIXEL));
if (!img->pixels) {
printf("Error: Cannot allocate pixel buffer\n");
free(img);
fclose(fp);
return NULL;
}
// 读取像素数据
if (strcmp(magic, "P3") == 0) {
// P3 格式 (ASCII)
printf("Reading P3 format...\n");
for (i = 0; i < img->width * img->height; i++) {
if (fscanf(fp, "%d %d %d", &r, &g, &b) != 3) {
printf("Error: Cannot read pixel data at position %d\n", i);
free(img->pixels);
free(img);
fclose(fp);
return NULL;
}
// 转换为 0-255 范围并设置像素 (BGR 格式)
img->pixels[i].Red = (UINT8)((b * 255) / img->maxval);
img->pixels[i].Green = (UINT8)((g * 255) / img->maxval);
img->pixels[i].Blue = (UINT8)((r * 255) / img->maxval);
img->pixels[i].Reserved = 0;
}
} else {
// P6 格式 (Binary)
printf("Reading P6 format...\n");
for (i = 0; i < img->width * img->height; i++) {
unsigned char rgb[3];
if (fread(rgb, 1, 3, fp) != 3) {
printf("Error: Cannot read binary pixel data at position %d\n", i);
free(img->pixels);
free(img);
fclose(fp);
return NULL;
}
// 转换为 0-255 范围并设置像素 (BGR 格式)
img->pixels[i].Red = (UINT8)((rgb[0] * 255) / img->maxval);
img->pixels[i].Green = (UINT8)((rgb[1] * 255) / img->maxval);
img->pixels[i].Blue = (UINT8)((rgb[2] * 255) / img->maxval);
img->pixels[i].Reserved = 0;
}
}
fclose(fp);
printf("PPM file loaded successfully!\n");
return img;
}
// 释放图像内存
void free_ppm(PPM_IMAGE *img) {
if (img) {
if (img->pixels) {
free(img->pixels);
}
free(img);
}
}
// 显示图像
EFI_STATUS display_image(PPM_IMAGE *img, int x, int y) {
EFI_STATUS Status;
EFI_GRAPHICS_OUTPUT_PROTOCOL *gop;
if (!img || !img->pixels) {
return EFI_INVALID_PARAMETER;
}
Status = gBS->LocateProtocol(&gEfiGraphicsOutputProtocolGuid, NULL, (VOID**)&gop);
if (EFI_ERROR(Status)) {
printf("Error: Cannot locate Graphics Output Protocol\n");
return Status;
}
Status = gop->Blt(gop, img->pixels, EfiBltBufferToVideo,
0, 0, 0, 0, img->width, img->height, 0);
if (EFI_ERROR(Status)) {
printf("Error: Failed to display image\n");
Print(L"%r\n\r",Status);
} else {
printf("Image displayed successfully!\n");
}
return Status;
}
// 主函数
int main(int argc, char *argv[]) {
PPM_IMAGE *img;
EFI_STATUS Status;
EFI_GRAPHICS_OUTPUT_PROTOCOL *gop;
const char *filename = "test.ppm"; // 默认文件名
int center_x, center_y;
printf("Simple PPM Viewer for UEFI\n");
printf("==========================\n\n");
// 如果提供了命令行参数,使用指定的文件名
if (argc > 1) {
filename = argv[1];
}
// 检查图形输出协议
Status = gBS->LocateProtocol(&gEfiGraphicsOutputProtocolGuid, NULL, (VOID**)&gop);
if (EFI_ERROR(Status)) {
printf("Error: Graphics Output Protocol not available\n");
return 1;
}
printf("Screen Resolution: %d x %d\n",
gop->Mode->Info->HorizontalResolution,
gop->Mode->Info->VerticalResolution);
// 加载 PPM 文件
img = load_ppm(filename);
if (!img) {
printf("Failed to load PPM file\n");
return 1;
}
// 检查图像是否适合屏幕
if (img->width > (int)gop->Mode->Info->HorizontalResolution ||
img->height > (int)gop->Mode->Info->VerticalResolution) {
printf("Warning: Image (%dx%d) is larger than screen (%dx%d)\n",
img->width, img->height,
gop->Mode->Info->HorizontalResolution,
gop->Mode->Info->VerticalResolution);
}
// 计算居中位置
center_x = ((int)gop->Mode->Info->HorizontalResolution - img->width) / 2;
center_y = ((int)gop->Mode->Info->VerticalResolution - img->height) / 2;
if (center_x < 0) center_x = 0;
if (center_y < 0) center_y = 0;
// 显示图像
Status = display_image(img, center_x, center_y);
if (EFI_ERROR(Status)) {
printf("Failed to display image\n");
free_ppm(img);
return 1;
}
// 清理资源
free_ppm(img);
printf("PPM Viewer finished.\n");
return 0;
}
在模拟器中运行结果如下:
完整的代码下载:
参考:
1. https://people.sc.fsu.edu/~jburkardt/data/ppmb/ppmb.html PPMB Files Portable Pixel Map (binary)
2. https://blog.csdn.net/qq_41598072/article/details/81129203 PPM图片格式及其C读写代码