#include <stddef.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <inttypes.h>
#include <assert.h>
#include "common.h"
#include "io.h"
#include "huffman.h"
#include "coeffs.h"
#include "imgproc.h"
#include "frame.h"
#include <inttypes.h>
const char *Pq_to_str[] = {
[0] = "8-bit",
[1] = "16-bit"
};
/* B.2.4.1 Quantization table-specification syntax */
int parse_qtable(FILE *stream, struct context *context)
{
int err;
uint8_t Pq, Tq;
struct qtable *qtable;
assert(context != NULL);
err = read_nibbles(stream, &Pq, &Tq);
RETURN_IF(err);
if (Tq >= 4) {
/* invalid value */
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Tq < 4);
assert(Pq < 2);
//printf("Pq = %" PRIu8 " (%s), Tq = %" PRIu8 " (QT identifier)\n", Pq, Pq_to_str[Pq], Tq);
qtable = &context->qtable[Tq];
/* precision */
qtable->Pq = Pq;
for (int i = 0; i < 64; ++i) {
if (Pq == 0) {
uint8_t byte;
err = read_byte(stream, &byte);
RETURN_IF(err);
qtable->Q[zigzag[i]] = (uint16_t)byte;
} else {
uint16_t word;
err = read_word(stream, &word);
RETURN_IF(err);
qtable->Q[zigzag[i]] = word;
}
}
for (int y = 0; y < 8; ++y) {
for (int x = 0; x < 8; ++x) {
//printf("%3" PRIu16 " ", qtable->Q[y * 8 + x]);
}
printf("\n");
}
return RET_SUCCESS;
}
int parse_frame_header(FILE *stream, struct context *context)
{
int err;
/* Sample precision */
uint8_t P;
/* Number of lines, Number of samples per line */
uint16_t Y, X;
/* Number of image components in frame */
uint8_t Nf;
assert(context != NULL);
err = read_byte(stream, &P);
RETURN_IF(err);
err = read_word(stream, &Y);
RETURN_IF(err);
err = read_word(stream, &X);
RETURN_IF(err);
err = read_byte(stream, &Nf);
RETURN_IF(err);
assert(X > 0);
assert(Nf > 0);
//printf("P = %" PRIu8 " (Sample precision), Y = %" PRIu16 ", X = %" PRIu16 ", Nf = %" PRIu8 " (Number of image components)\n", P, Y, X, Nf);
/* precision */
context->P = P;
context->Y = Y;
context->X = X;
/* components */
context->Nf = Nf;
uint8_t max_H = 0, max_V = 0;
for (int i = 0; i < Nf; ++i) {
uint8_t C;
uint8_t H, V;
uint8_t Tq;
err = read_byte(stream, &C);
RETURN_IF(err);
err = read_nibbles(stream, &H, &V);
RETURN_IF(err);
err = read_byte(stream, &Tq);
RETURN_IF(err);
//printf("C = %" PRIu8 " (Component identifier), H = %" PRIu8 ", V = %" PRIu8 ", Tq = %" PRIu8 " (QT identifier)\n", C, H, V, Tq);
context->component[C].H = H;
context->component[C].V = V;
context->component[C].Tq = Tq;
max_H = (H > max_H) ? H : max_H;
max_V = (V > max_V) ? V : max_V;
}
context->max_H = max_H;
context->max_V = max_V;
err = compute_no_blocks_and_alloc_buffers(context);
RETURN_IF(err);
return RET_SUCCESS;
}
const char *Tc_to_str[] = {
[0] = "DC",
[1] = "AC"
};
int parse_huffman_tables(FILE *stream, struct context *context)
{
int err;
uint8_t Tc, Th;
assert(context != NULL);
err = read_nibbles(stream, &Tc, &Th);
RETURN_IF(err);
if (Tc >= 2) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Tc < 2);
//printf("Tc = %" PRIu8 " (%s table) Th = %" PRIu8 " (HT identifier)\n", Tc, Tc_to_str[Tc], Th);
struct htable *htable = &context->htable[Tc][Th];
for (int i = 0; i < 16; ++i) {
err = read_byte(stream, &htable->L[i]);
RETURN_IF(err);
}
for (int i = 0; i < 16; ++i) {
uint8_t L = htable->L[i];
for (int l = 0; l < L; ++l) {
err = read_byte(stream, &htable->V[i][l]);
RETURN_IF(err);
}
}
/* Annex C */
struct hcode *hcode = &context->hcode[Tc][Th];
err = conv_htable_to_hcode(htable, hcode);
RETURN_IF(err);
return RET_SUCCESS;
}
struct scan {
uint8_t Ns;
uint8_t Cs[256];
/* useful to remove differential DC coding
*
* At the beginning of the scan and at the beginning of each restart interval, the prediction for the DC coefficient prediction
* is initialized to 0. */
struct int_block *last_block[256];
};
int parse_scan_header(FILE *stream, struct context *context, struct scan *scan)
{
int err;
/* Number of image components in scan */
uint8_t Ns;
err = read_byte(stream, &Ns);
RETURN_IF(err);
//printf("Ns = %" PRIu8 " (Number of image components in scan)\n", Ns);
assert(scan != NULL);
scan->Ns = Ns;
for (int j = 0; j < Ns; ++j) {
uint8_t Cs;
uint8_t Td, Ta;
err = read_byte(stream, &Cs);
RETURN_IF(err);
err = read_nibbles(stream, &Td, &Ta);
RETURN_IF(err);
//printf("Cs%i = %" PRIu8 " (Component identifier), Td%i = %" PRIu8 " (DC HT identifier), Ta%i = %" PRIu8 " (AC HT identifier)\n", j, Cs, j, Td, j, Ta);
scan->Cs[j] = Cs;
context->component[Cs].Td = Td;
context->component[Cs].Ta = Ta;
}
uint8_t Ss;
uint8_t Se;
uint8_t Ah, Al;
err = read_byte(stream, &Ss);
RETURN_IF(err);
err = read_byte(stream, &Se);
RETURN_IF(err);
err = read_nibbles(stream, &Ah, &Al);
RETURN_IF(err);
if (Ss != 0 || Se != 63) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Ss == 0);
assert(Se == 63);
//printf("Ss = %" PRIu8 " (the first DCT coefficient), Se = %" PRIu8 " (the last DCT coefficient)\n", Ss, Se);
if (Ah != 0 || Al != 0) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(Ah == 0);
assert(Al == 0);
//printf("Ah = %" PRIu8 " (bit position high), Al = %" PRIu8 " (bit position low)\n", Ah, Al);
context->mblocks = 0;
return RET_SUCCESS;
}
/* read MCU */
int read_macroblock(struct bits *bits, struct context *context, struct scan *scan)
{
int err;
assert(scan != NULL);
assert(context != NULL);
size_t seq_no = context->mblocks;
if (scan->Ns == 0) {
/* nothing to do */
return RET_FAILURE_NO_MORE_DATA;
} else if (scan->Ns == 1) {
/* A.2.2 Non-interleaved order (Ns = 1) */
assert(scan->Ns == 1);
uint8_t Cs = scan->Cs[0];
uint8_t H = context->component[Cs].H;
uint8_t V = context->component[Cs].V;
size_t blocks_in_mb = H * V;
for (size_t w = 0; w < blocks_in_mb; ++w) {
size_t block_x = (blocks_in_mb * seq_no + w) % context->component[Cs].b_x;
size_t block_y = (blocks_in_mb * seq_no + w) / context->component[Cs].b_x;
size_t block_seq = block_y * context->component[Cs].b_x + block_x;
struct int_block *int_block = &context->component[Cs].int_buffer[block_seq];
/* read block */
err = read_block(bits, context, Cs, int_block);
RETURN_IF(err);
if (scan->last_block[Cs] != NULL) {
int_block->c[0] += scan->last_block[Cs]->c[0];
}
scan->last_block[Cs] = int_block;
}
} else {
assert(scan->Ns > 1);
if (context->m_x == 0) {
/* missing SOF before SOS? */
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(context->m_x != 0);
size_t x = seq_no % context->m_x;
size_t y = seq_no / context->m_x;
// printf("[DEBUG] reading macroblock... x=%zu y=%zu\n", x, y);
/* for each component */
for (int j = 0; j < scan->Ns; ++j) {
uint8_t Cs = scan->Cs[j];
uint8_t H = context->component[Cs].H;
uint8_t V = context->component[Cs].V;
// printf("[DEBUG] reading component %" PRIu8 " blocks @ x=%zu y=%zu\n", Cs, x * H, y * V);
/* for each 8x8 block */
for (int v = 0; v < V; ++v) {
for (int h = 0; h < H; ++h) {
size_t block_x = x * H + h;
size_t block_y = y * V + v;
assert(block_x < context->component[Cs].b_x);
size_t block_seq = block_y * context->component[Cs].b_x + block_x;
// printf("[DEBUG] reading component %" PRIu8 " blocks @ x=%zu y=%zu out of X=%zu Y=%zu\n", Cs, x * H + h, y * V + v, context->component[Cs].b_x, context->component[Cs].b_y);
// printf("[DEBUG] reading component %" PRIu8 " block# %zu out of %zu\n", Cs, block_seq, context->component[Cs].b_x * context->component[Cs].b_y);
struct int_block *int_block = &context->component[Cs].int_buffer[block_seq];
/* past the end of data? */
if (block_seq >= context->component[Cs].b_x * context->component[Cs].b_y) {
int_block = NULL;
}
/* read block */
err = read_block(bits, context, Cs, int_block);
RETURN_IF(err);
/* remove differential DC coding */
if (scan->last_block[Cs] != NULL) {
int_block->c[0] += scan->last_block[Cs]->c[0];
}
scan->last_block[Cs] = int_block;
}
}
}
}
return RET_SUCCESS;
}
int read_ecs(FILE *stream, struct context *context, struct scan *scan)
{
int err;
struct bits bits;
init_bits(&bits, stream);
for (int i = 0; i < 256; ++i) {
scan->last_block[i] = NULL;
}
/* loop over macroblocks */
do {
err = read_macroblock(&bits, context, scan);
if (err == RET_FAILURE_NO_MORE_DATA)
goto end;
RETURN_IF(err);
context->mblocks++;
} while (1);
end:
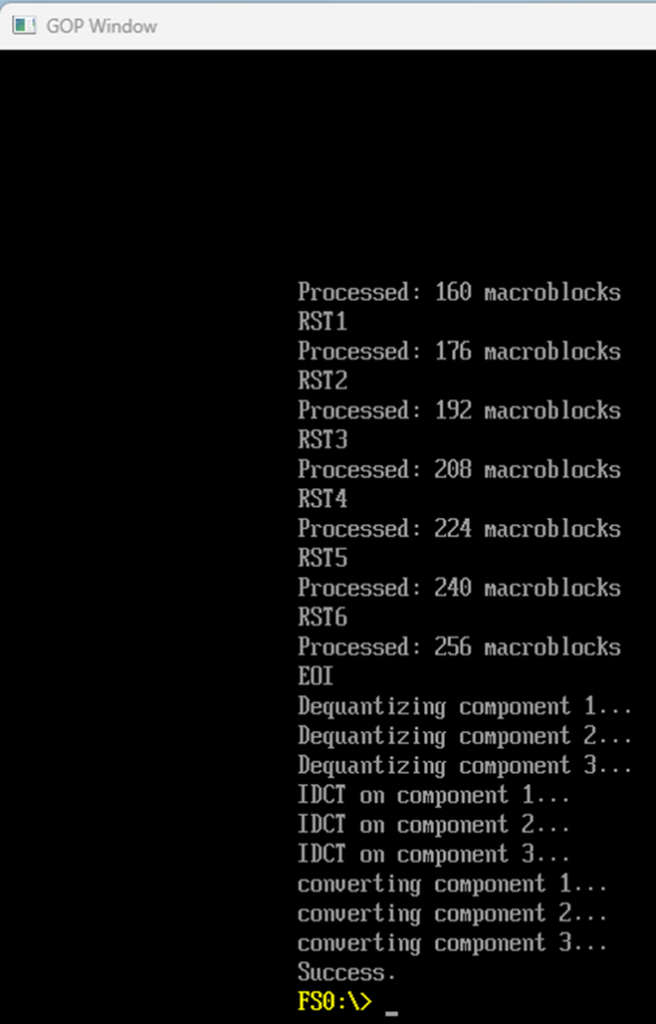
printf("Processed: %zu macroblocks\n", context->mblocks);
return RET_SUCCESS;
}
int parse_restart_interval(FILE *stream, struct context *context)
{
int err;
uint16_t Ri;
err = read_word(stream, &Ri);
RETURN_IF(err);
context->Ri = Ri;
return RET_SUCCESS;
}
int parse_comment(FILE *stream, uint16_t len)
{
if (len < 2) {
return RET_FAILURE_FILE_UNSUPPORTED;
}
assert(len >= 2);
size_t l = len - 2;
char *buf = malloc(l + 1);
if (buf == NULL) {
return RET_FAILURE_MEMORY_ALLOCATION;
}
if (fread(buf, sizeof(char), l, stream) != l) {
free(buf);
return RET_FAILURE_FILE_IO;
}
buf[l] = 0;
printf("%s\n", buf);
free(buf);
return RET_SUCCESS;
}
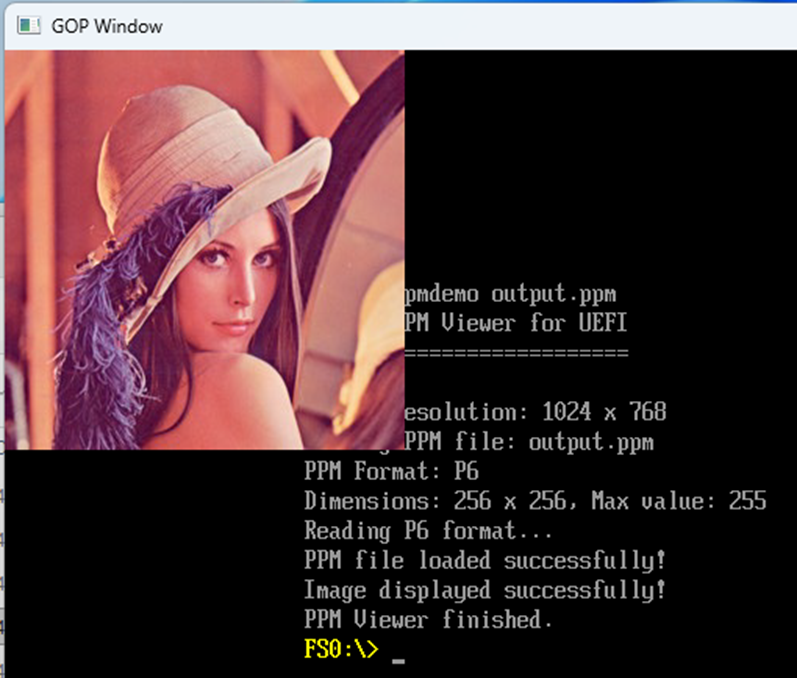
int write_image(struct context *context, const char *path)
{
int err;
struct frame frame;
err = frame_create(context, &frame);
RETURN_IF(err);
err = frame_to_rgb(&frame);
if (err) {
goto end;
}
err = write_frame(&frame, path);
end:
frame_destroy(&frame);
return err;
}
int epilogue(struct context *context, const char *path)
{
int err;
err = dequantize(context);
RETURN_IF(err);
err = inverse_dct(context);
RETURN_IF(err);
err = conv_blocks_to_frame(context);
RETURN_IF(err);
err = write_image(context, path);
RETURN_IF(err);
return RET_SUCCESS;
}
int parse_format(FILE *stream, struct context *context, const char *path)
{
int err;
struct scan scan;
// init
scan.Ns = 0;
while (1) {
uint16_t marker;
err = read_marker(stream, &marker);
RETURN_IF(err);
/* An asterisk (*) indicates a marker which stands alone,
* that is, which is not the start of a marker segment. */
switch (marker) {
uint16_t len;
long pos;
/* SOI* Start of image */
case 0xffd8:
printf("SOI\n");
break;
/* APPn */
case 0xffe0:
case 0xffe1:
case 0xffe2:
case 0xffe3:
case 0xffe4:
case 0xffe5:
case 0xffe6:
case 0xffe7:
case 0xffe8:
case 0xffeb:
case 0xffec:
case 0xffed:
case 0xffee:
printf("APP%i\n", marker & 0xf);
err = read_length(stream, &len);
RETURN_IF(err);
err = skip_segment(stream, len);
RETURN_IF(err);
break;
/* DQT Define quantization table(s) */
case 0xffdb:
printf("DQT\n");
pos = ftell(stream);
err = read_length(stream, &len);
RETURN_IF(err);
do {
err = parse_qtable(stream, context);
RETURN_IF(err);
} while (ftell(stream) < pos + len);
break;
/* SOF0 Baseline DCT */
case 0xffc0:
printf("SOF0\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
break;
/* SOF1 Extended sequential DCT */
case 0xffc1:
printf("SOF1\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
break;
/* SOF2 Progressive DCT */
case 0xffc2:
printf("SOF2\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Progressive DCT not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* SOF3 Lossless (sequential) */
case 0xffc3:
printf("SOF3\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Lossless JPEG not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* SOF9 Extended sequential DCT (arithmetic coding) */
case 0xffc9:
printf("SOF9\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Arithmetic coding not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* SOF10 Progressive DCT (arithmetic coding) */
case 0xffca:
printf("SOF10\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_frame_header(stream, context);
RETURN_IF(err);
fprintf(stderr, "Arithmetic coding not supported!\n");
return RET_FAILURE_FILE_UNSUPPORTED;
/* DHT Define Huffman table(s) */
case 0xffc4:
printf("DHT\n");
pos = ftell(stream);
err = read_length(stream, &len);
RETURN_IF(err);
/* parse multiple tables in single DHT */
do {
err = parse_huffman_tables(stream, context);
RETURN_IF(err);
} while (ftell(stream) < pos + len);
break;
/* SOS Start of scan */
case 0xffda:
printf("SOS\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_scan_header(stream, context, &scan);
RETURN_IF(err);
err = read_ecs(stream, context, &scan);
RETURN_IF(err);
break;
/* EOI* End of image */
case 0xffd9:
printf("EOI\n");
pos = ftell(stream);
fseek(stream, 0, SEEK_END);
if (ftell(stream) - pos > 0) {
printf("*** %li bytes of garbage ***\n", ftell(stream) - pos);
}
err = epilogue(context, path);
RETURN_IF(err);
return RET_SUCCESS;
/* DRI Define restart interval */
case 0xffdd:
printf("DRI\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_restart_interval(stream, context);
RETURN_IF(err);
break;
/* RSTm* Restart with modulo 8 count “m” */
case 0xffd0:
case 0xffd1:
case 0xffd2:
case 0xffd3:
case 0xffd4:
case 0xffd5:
case 0xffd6:
case 0xffd7:
printf("RST%i\n", marker & 0xf);
err = read_ecs(stream, context, &scan);
RETURN_IF(err);
break;
/* COM Comment */
case 0xfffe:
printf("COM\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = parse_comment(stream, len);
RETURN_IF(err);
break;
/* TEM* For temporary private use in arithmetic coding */
case 0xff01:
printf("TEM\n");
break;
/* DAC Define arithmetic coding conditioning(s) */
case 0xffcc:
printf("DAC\n");
err = read_length(stream, &len);
RETURN_IF(err);
err = skip_segment(stream, len);
RETURN_IF(err);
break;
default:
//fprintf(stderr, "unhandled marker 0x%" PRIx16 "\n", marker);
return RET_FAILURE_FILE_UNSUPPORTED;
}
}
}
int process_jpeg_stream(FILE *stream, const char *path)
{
int err;
struct context *context = malloc(sizeof(struct context));
if (context == NULL) {
fprintf(stderr, "malloc failure\n");
return RET_FAILURE_MEMORY_ALLOCATION;
}
err = init_context(context);
if (err) {
goto end;
}
err = parse_format(stream, context, path);
end:
free_buffers(context);
free(context);
return err;
}
int process_jpeg_file(const char *i_path, const char *o_path)
{
FILE *stream = fopen(i_path, "r");
if (stream == NULL) {
fprintf(stderr, "fopen failure\n");
return RET_FAILURE_FILE_OPEN;
}
int err = process_jpeg_stream(stream, o_path);
fclose(stream);
return err;
}
int main(int argc, char *argv[])
{
const char *i_path = argc > 1 ? argv[1] : "Lenna.jpg";
const char *o_path = argc > 2 ? argv[2] : NULL;
int err = process_jpeg_file(i_path, o_path);
if (err) {
printf("Failure.\n");
return 1;
}
printf("Success.\n");
return 0;
}