在使用之前,需要特别注意的是:MPU-6050 本身只支持到 3.3V,如果你需要供电5V那么要特别确认一下你的板子是否有转换。我使用的下面这个模块上面带降压的,所以可以直接接5V.

另外,连接GND和VCC时一定要注意不能搞反了,否则转换芯片会急剧发热(推荐你第一次上电的时候留心这个芯片)。
首推极客工坊的文章【参考1】。但是可能是版本太老的缘故,在编译时(1.5.0)会出现core.a的错误。
随后查了一下,Arduino官方网站上有介绍和示例代码【参考2】:
// MPU-6050 Short Example Sketch
// By Arduino User JohnChi
// August 17, 2014
// Public Domain
#include<Wire.h>
const int MPU=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.print(Tmp/340.00+36.53); //equation for temperature in degrees C from datasheet
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
delay(333);
}
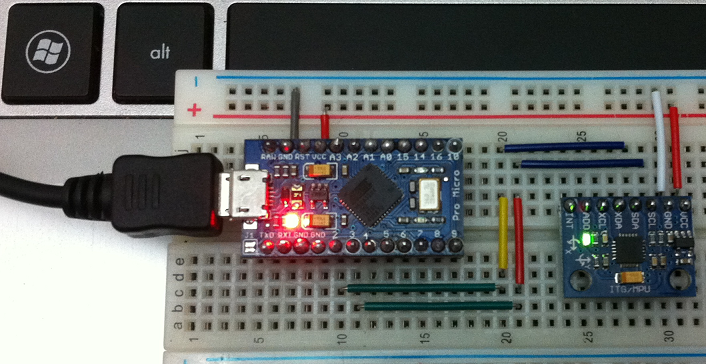
我使用的是 Arduino Pro Micro (这并非Arduino官方出品,是一种类似 Arduino Leonardo 的兼容产品) , 电路非常简单,使用面包板即可
运行结果
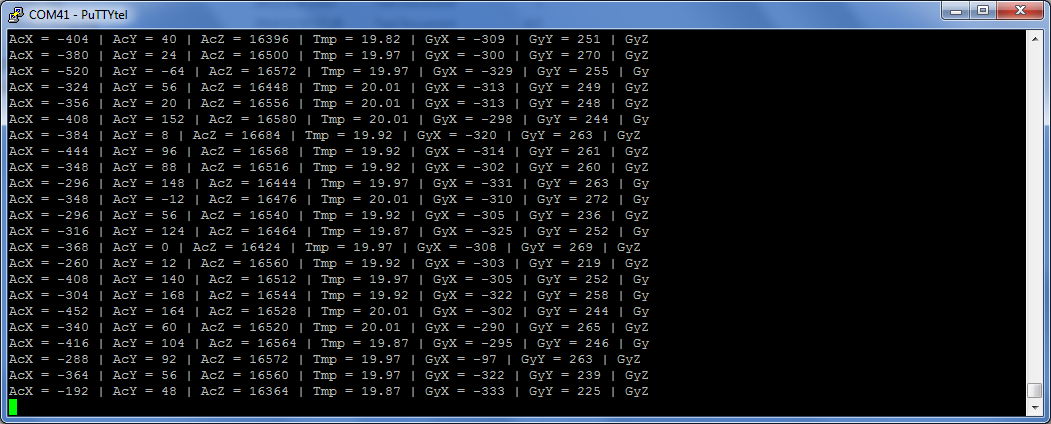
取得值本身很简单,但是如果想解出正确的姿态还是蛮复杂的。
参考:
1.http://www.geek-workshop.com/thread-1017-1-1.html arduino学习笔记37 – Arduino Uno + MPU6050首例整合性6轴演示实验
2.http://playground.arduino.cc/Main/MPU-6050 MPU-6050 Accelerometer + Gyro