继续之前的《PC 内存的秘密 第一部分》,来自 https://www.bit-tech.net/reviews/tech/memory/the_secrets_of_pc_memory_part_1/2/
第二章 存储架构
计算机上内存系统最显眼的部分是内存和板载插槽。每一代和每一类型的内存外形和插槽都略有不同,这样的设计用来避免因为误插不同型号的内存而造成损坏。
每个内存模块上都有称为 DRAM 的小型内存芯片,有时也被称为更通用的名称 – 集成电路 (IC)。DRAM 核心是一组称为单元的电容器,它们通过保持电荷来保留数据(0 或 1)。
在读取数据之前,指定的电容器会放电到一个放大器(电压电流太小,无法被直接读取,因此需要一个放大器)。也是因为这个原因信号读取过程是一个破坏性动作,会擦除电容器上的电荷。所以,在读取之后还需要额外的过程来为已读取的单元充电。这种易失性是 RAM 技术与 NAND 和 NOR 等固态存储器之间的主要区别。
根据金士顿内存公司的数据,对于第一代双倍数据速率内存(DDR1),普通计算机访问物理内存大约需要 200ns(纳秒),而硬盘驱动器则需要 12,000,000ns。如果换算成更容易理解的时间单位,两者的速度相差60,000 倍。这意味着做某件事需要 1 分钟或 42 天。
Cache(缓存)和 RAM 之间的区别
缓存也是一种内存,比 DDR 等标准系统内存快得多。这种内存用于充当频繁请求数据的专用存储区域,以实现超快速访问。根据情况,缓存也会被称作“缓冲区”。现代的缓存都是位于处理器芯片内,这些缓存根据优先级和访问速度进行分段:1 级 (L1)、2 级 (L2) 和 3 级 (L3)。L1 速度最快,延迟最低,但容量(通常以KB为单位)最小。在处理数据时,DDR 内存模块中最常访问的指令和数据会被复制到 L1 缓存中。缓存有许多不同的职责:有些仅用于数据,而有些则更专门用于命令代码或程序指令。所有现代台式机 CPU 都有一个专用的、独立的 L1 缓存,用于指令和数据。
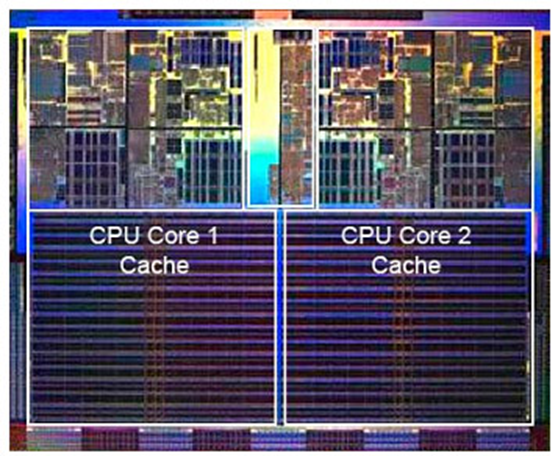
L1 缓存的速度比标准 DDR2 甚至 DDR3 内存快很多倍。搭配最新 Intel X38 芯片组的 Intel E6750 的 L1 缓存性能约为 42,500MB/s。其次是速度稍慢但容量大得多(通常以MB为单位)的 L2 缓存,性能约为 20,500MB/s。相比之下,最新的双通道 DDR3 内存在 1,333MHz 和平均延迟设置下带宽约为 8,800MB/s。
一些 DDR 内存模块使用缓冲技术来实现更高的可靠性和性能。这些具有先进逻辑和电路的 “缓冲”内存是专门设计用于工作站和服务器级的。
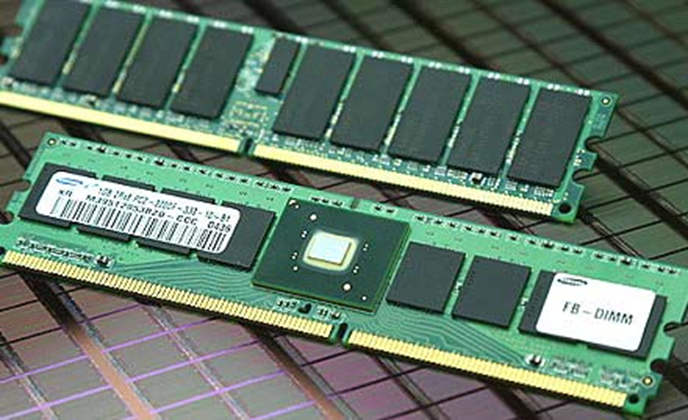
Fully-Buffered DIMM (FB-DIMM) 使用高级内存缓冲器 (AMB) 来改善数据传输、信号完整性和错误检测。它旨在以串行方式移动数据,而不是 AMB 和内存控制器之间的并行架构。 FB-DIMM 的问题在于可扩展性较差,同时额外的芯片芯片会导致数据访问延迟以及发热严重的问题
常见的台式机内存模块被称为“无缓冲”DIMM;它们使用不同的内存总线技术,相比之下要便宜得多。读者应该注意,尽管标记为“DDR2”,但 FB-DIMM 与常见的台式计算机不兼容。
这里多介绍一下:这种内存长下面这样【参考1】
传统的内存拓扑结构都是这样:
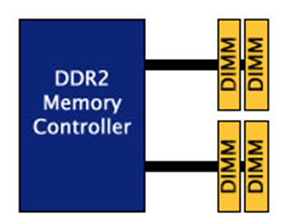
FB-DIMM拓扑结构这样:

固态存储器 重要的是不要混淆这两种截然不同的存储器:易失性 RAM 技术和非易失性闪存存储器。闪存(或非易失性)存储器基于两种基本技术 – NAND 和 NOR。既然它们与 DDR 无关,为什么我们必须考虑这些类型的存储器?
计算机系统的未来在很大程度上依赖于现有的 DDR 存储器与非易失性闪存存储器协同工作,以提高整体系统性能。与随机存取存储器 (RAM) 技术不同,基于闪存的存储器无需一直供电即可保留数据。虽然它们的访问速度比当前的 DDR 技术慢,但由于没有机械部件,它们在随机读取期间通常比典型的机械硬盘驱动器快得多。

在 ReadyBoost 下,Microsoft Vista 和未来的操作系统将同时使用这两种类型的内存来提高整体系统性能。一个很好的例子是英特尔基于 NAND 闪存技术的“Turbo 内存”。在研发阶段,英特尔内部称为“Robson”技术,但现在 Turbo 内存已成为最新“Santa Rosa”迅驰平台不可或缺的一部分。它就像一个用于频繁使用的文件和应用程序的大型缓存,由于随机读取延迟很小并且能避免文件碎片(无需像硬盘寻道),因此比硬盘更快。
支持这种双存储技术的操作系统在启动时具有优势,因为关键操作系统文件可以在启动期间存储在基于闪存的内存中。
这种设计可以认为是在内存和硬盘之间再添加一层 Cache, 但是随着固态硬盘的普及,机械硬的落幕,这种多增加一层缓存的设计也退出了历史舞台。
固态硬盘
全固态硬盘驱动器是未来个人电脑的重要组成部分,它们的功耗相比机械硬盘要低得多。另外,在恶劣的移动环境中,其可靠性和生存能力远远高于标准机械磁盘驱动器。
通常,固态存储技术比当前的 DDR 技术慢,并且数据写入寿命可能相对较短,随着技术进步这个问题正在迅速改变。新技术在不断增加固态存储的寿命和存储密度。这种设备的寿命取决于制造商采用的错误校正、位冗余、操作逻辑和自诊断算法的组合。
使用固态硬盘的直接好处是,由于没有任何移动和旋转的机械系统,数据在任何突然的高 G 运动中都能生存下来。此外,固态硬盘的功耗和工作温度更低,是笔记本电脑和移动设备的理想选择。
因此,可以合理预期传统机械硬盘的许多故障将被消除。全球大型数据中心的运营成本有望大幅降低,空调需求减少,灾难性故障也更少。随着成本下降和密度增加,未来几年固态内存的市场将比 DRAM 技术更大。
原文距离今天已经有一段时间了,这段时间里,因为固态硬盘的迅速发展(主要是价格迅速降低),ReadyBoost 技术已经退出了历史舞台。如果有人诟病机械硬盘的缓慢,最好的方法就是更换为固态键盘。不过我个人还是更喜欢机械硬盘,因为这种硬盘只要妥善保存能够维持数据,并且在寿命将近时会有足够的提示而不是忽然完全坏掉。
参考: