使用DFRobot 的 FireBeetle 测试 SPI速度,代码在\DFRobot_FireBeetle-ESP32\0.0.9\libraries\SPI\examples 下面:
/* The ESP32 has four SPi buses, however as of right now only two of
* them are available to use, HSPI and VSPI. Simply using the SPI API
* as illustrated in Arduino examples will use HSPI, leaving VSPI unused.
*
* However if we simply intialise two instance of the SPI class for both
* of these buses both can be used. However when just using these the Arduino
* way only will actually be outputting at a time.
*
* Logic analyser capture is in the same folder as this example as
* "multiple_bus_output.png"
*
* created 30/04/2018 by Alistair Symonds
*/
#include <SPI.h>
static const int spiClk = 1000000; // 1 MHz
//uninitalised pointers to SPI objects
SPIClass * vspi = NULL;
SPIClass * hspi = NULL;
void setup() {
//initialise two instances of the SPIClass attached to VSPI and HSPI respectively
vspi = new SPIClass(VSPI);
hspi = new SPIClass(HSPI);
//clock miso mosi ss
//initialise vspi with default pins
//SCLK = 18, MISO = 19, MOSI = 23, SS = 5
vspi->begin();
//alternatively route through GPIO pins of your choice
//hspi->begin(0, 2, 4, 33); //SCLK, MISO, MOSI, SS
//initialise hspi with default pins
//SCLK = 14, MISO = 12, MOSI = 13, SS = 15
hspi->begin();
//alternatively route through GPIO pins
//hspi->begin(25, 26, 27, 32); //SCLK, MISO, MOSI, SS
//set up slave select pins as outputs as the Arduino API
//doesn't handle automatically pulling SS low
pinMode(5, OUTPUT); //VSPI SS
pinMode(15, OUTPUT); //HSPI SS
}
// the loop function runs over and over again until power down or reset
void loop() {
//use the SPI buses
vspiCommand();
hspiCommand();
delay(100);
}
void vspiCommand() {
byte data = 0b01010101; // junk data to illustrate usage
//use it as you would the regular arduino SPI API
vspi->beginTransaction(SPISettings(spiClk, MSBFIRST, SPI_MODE0));
digitalWrite(5, LOW); //pull SS slow to prep other end for transfer
vspi->transfer(data);
digitalWrite(5, HIGH); //pull ss high to signify end of data transfer
vspi->endTransaction();
}
void hspiCommand() {
byte stuff = 0b11001100;
hspi->beginTransaction(SPISettings(spiClk, MSBFIRST, SPI_MODE0));
digitalWrite(15, LOW);
hspi->transfer(stuff);
digitalWrite(15, HIGH);
hspi->endTransaction();
}
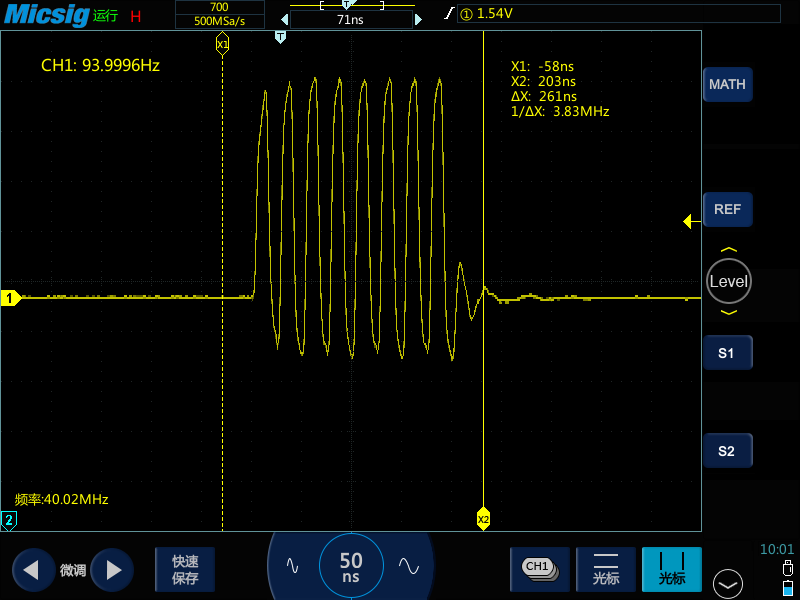
其中的 spiClk 指定的是SPI 通讯速度,最高可以设置为 80000000(80M),示波器测量如下:
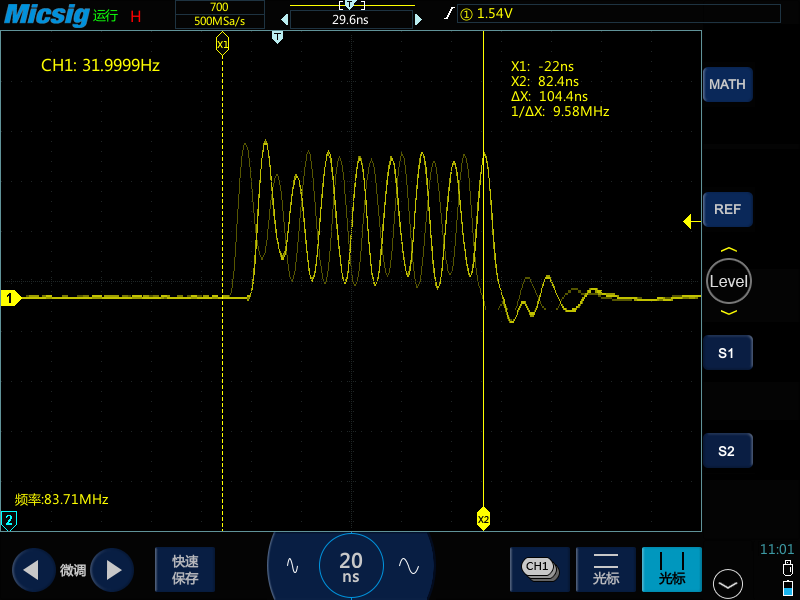
40M 波形测试如下