#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/ShellCEntryLib.h>
/***
Print a welcoming message.
Establishes the main structure of the application.
@retval 0 The application exited normally.
@retval Other An error occurred.
***/
INTN
EFIAPI
ShellAppMain (
IN UINTN Argc,
IN CHAR16 **Argv
)
{
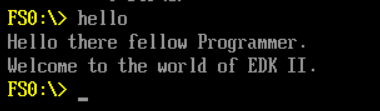
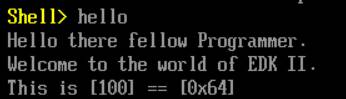
Print(L"Hello there fellow Programmer.\n");
Print(L"Welcome to the world of EDK II.\n");
return(0);
}
这个代码功能很简单,就是显示两行字符串。生成的代码为 8,160 (0x1FE0)bytes大小。
特别的,要在对应的INF文件中加入下面的语句保证生成 COD文件。
[BuildOptions]
MSFT:*_*_X64_CC_FLAGS = /FAsc /Od
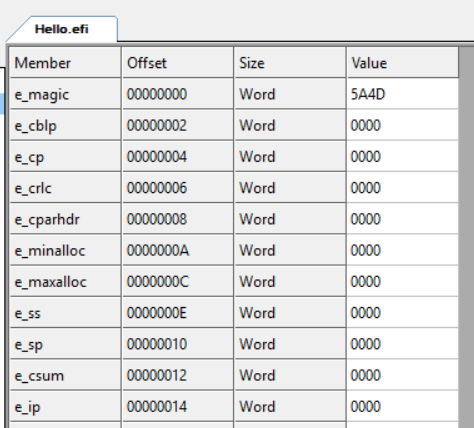
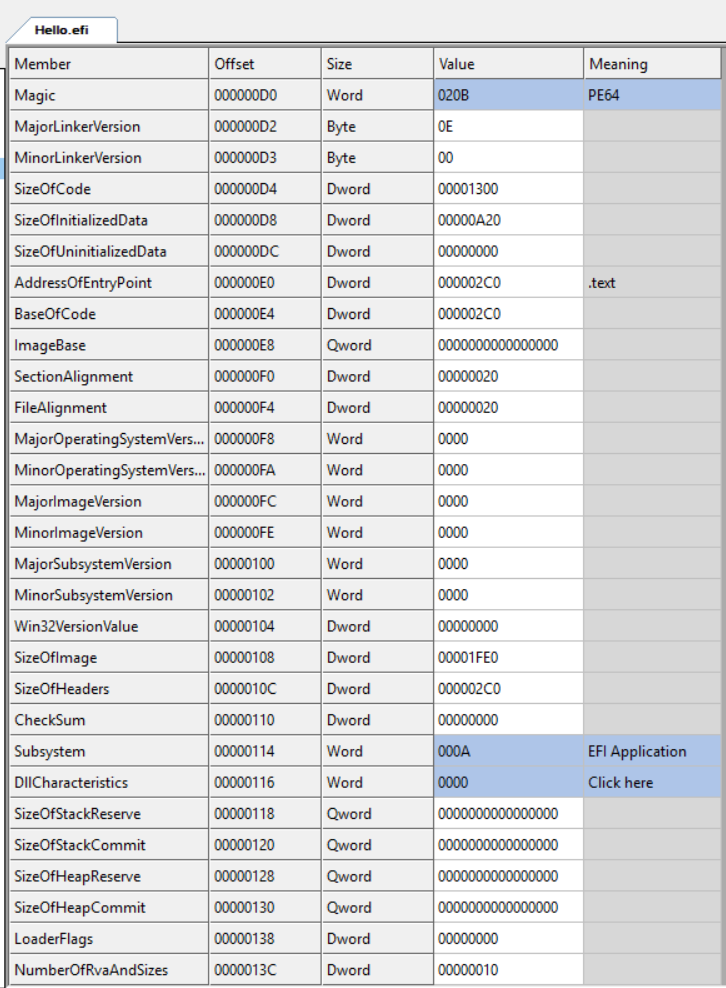
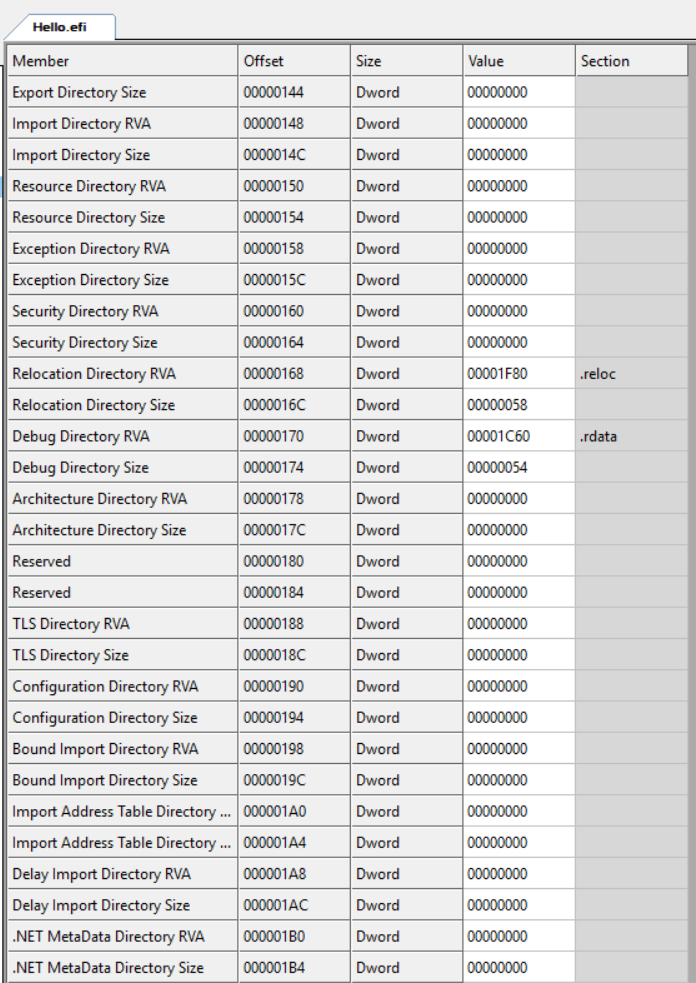
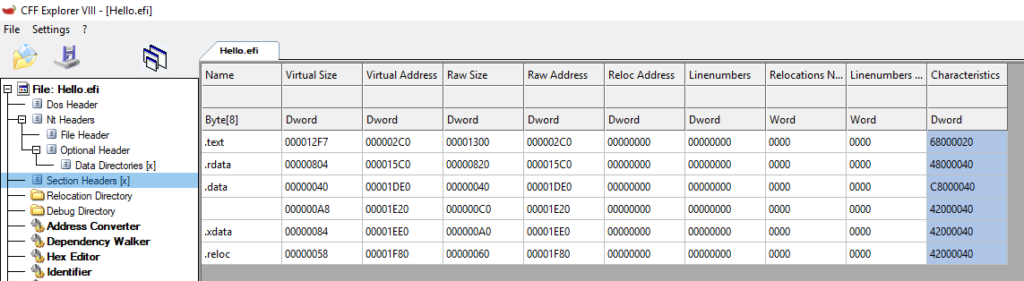
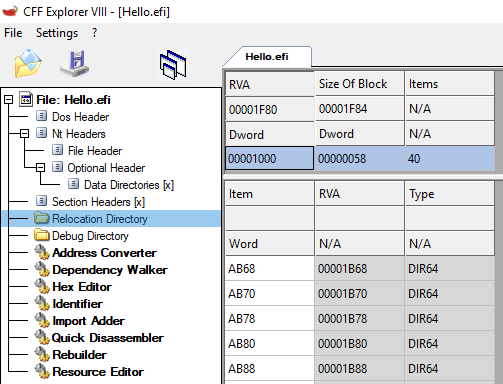
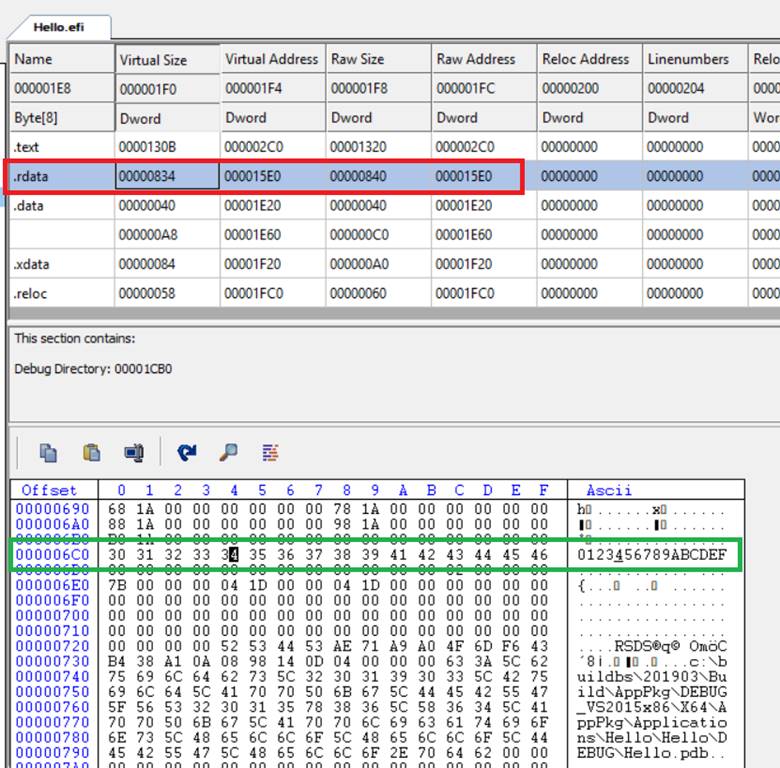
接下来使用 SFF 工具直接分析 EFI:
1.从 0 到 0x3C 是一个 Dos Header。这个只是作为兼容性的结构存在并没有任何功能。
///
/// @attention
/// EFI_IMAGE_HEADERS64 is for use ONLY by tools.
///
typedef struct {
UINT32 Signature;
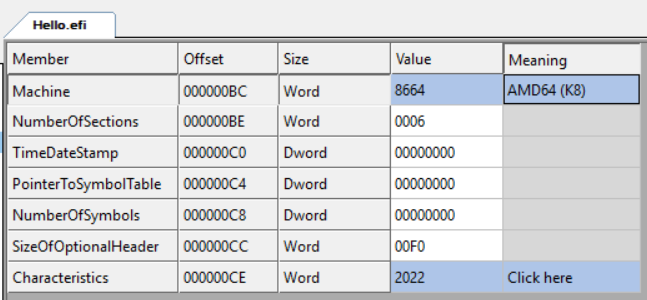
EFI_IMAGE_FILE_HEADER FileHeader;
EFI_IMAGE_OPTIONAL_HEADER64 OptionalHeader;
} EFI_IMAGE_NT_HEADERS64;
///
/// Debug Directory Format.
///
typedef struct {
UINT32 Characteristics;
UINT32 TimeDateStamp;
UINT16 MajorVersion;
UINT16 MinorVersion;
UINT32 Type;
UINT32 SizeOfData;
UINT32 RVA; ///< The address of the debug data when loaded, relative to the image base.
UINT32 FileOffset; ///< The file pointer to the debug data.
} EFI_IMAGE_DEBUG_DIRECTORY_ENTRY;
Start Length Name Class
0001:00000000 000012f7H .text$mn CODE
0002:00000000 000006f4H .rdata DATA
0002:000006f4 00000110H .rdata$zzzdbg DATA
0003:00000000 00000020H .data DATA
0003:00000020 00000020H .bss DATA
0004:00000000 000000a8H .pdata DATA
0005:00000000 00000084H .xdata DATA
/**
Internal function that convert a number to a string in Buffer.
Print worker function that converts a decimal or hexadecimal number to an ASCII string in Buffer.
@param Buffer Location to place the ASCII string of Value.
@param Value The value to convert to a Decimal or Hexadecimal string in Buffer.
@param Radix Radix of the value
@return A pointer to the end of buffer filled with ASCII string.
**/
CHAR8 *
BasePrintLibValueToString (
IN OUT CHAR8 *Buffer,
IN INT64 Value,
IN UINTN Radix
)
{
UINT32 Remainder;
//
// Loop to convert one digit at a time in reverse order
//
*Buffer = 0;
do {
Value = (INT64)DivU64x32Remainder ((UINT64)Value, (UINT32)Radix, &Remainder);
*(++Buffer) = mHexStr[Remainder];
} while (Value != 0);
//
// Return pointer of the end of filled buffer.
//
return Buffer;
}
; reserve space for 2 arguments
sub rsp, 2 * 8
; rdx points to the EFI_SYSTEM_TABLE structure
; which is the 2nd argument passed to us by the UEFI firmware
; adding 64 causes rcx to point to EFI_SYSTEM_TABLE.ConOut
mov rcx, [rdx + 64]
; load the address of our string into rdx
lea rdx, [rel strHello]
; EFI_SYSTEM_TABLE.ConOut points to EFI_SIMPLE_TEXT_OUTPUT_PROTOCOL
; call OutputString on the value in rdx
call [rcx + EFI_SIMPLE_TEXT_OUTPUT_PROTOCOL.OutputString]
||0:6: kd> !rsdt
Sorry: Unable to get ACPI!AcpiInformation.
Searching for RSDP.*************************************************************************
*** ***
*** ***
*** Either you specified an unqualified symbol, or your debugger ***
*** doesn't have full symbol information. Unqualified symbol ***
*** resolution is turned off by default. Please either specify a ***
*** fully qualified symbol module!symbolname, or enable resolution ***
*** of unqualified symbols by typing ".symopt- 100". Note that ***
*** enabling unqualified symbol resolution with network symbol ***
*** server shares in the symbol path may cause the debugger to ***
*** appear to hang for long periods of time when an incorrect ***
*** symbol name is typed or the network symbol server is down. ***
*** ***
*** For some commands to work properly, your symbol path ***
*** must point to .pdb files that have full type information. ***
*** ***
*** Certain .pdb files (such as the public OS symbols) do not ***
*** contain the required information. Contact the group that ***
*** provided you with these symbols if you need this command to ***
*** work. ***
*** ***
*** Type referenced: hal!_RSDT_32 ***
*** ***
*************************************************************************
.........................................0x0effe0: Read 0x000020 of 0x000024 bytes
Could not locate the RSDT pointer