根据 https://github.com/loboris/ESP32_ymodem_example 修改的 Arduino 版本的 ESP32 代码,在 FireBeelte 上测试通过。通过USB 串口进行测试,接收到的数据并不会存放在任何地方。
//https://github.com/loboris/ESP32_ymodem_example/blob/master/components/ymodem/ymodem.c
#include "ymodem.h"
//------------------------------------------------------------------------
static unsigned short crc16(const unsigned char *buf, unsigned long count)
{
unsigned short crc = 0;
int i;
while(count--) {
crc = crc ^ *buf++ << 8;
for (i=0; i<8; i++) {
if (crc & 0x8000) crc = crc << 1 ^ 0x1021;
else crc = crc << 1;
}
}
return crc;
}
//--------------------------------------------------------------
static int32_t Receive_Byte (unsigned char *c, uint32_t timeout)
{
unsigned char ch;
//ZivDebug int len = uart_read_bytes(EX_UART_NUM, &ch, 1, timeout / portTICK_RATE_MS);
//ZivDebug_Start
int len=0;
unsigned int Elsp=millis();
while ((millis()-Elsp<timeout / portTICK_RATE_MS)&&(len==0)) {
if (Serial.available()) {
ch=Serial.read();
len=1;
#ifdef ENDEBUG
Serial2.print("ESP32 RCV1:");
Serial2.print(ch,HEX);
Serial2.println(" ");
#endif
}
}
//ZivDebug_End
if (len <= 0) return -1;
*c = ch;
return 0;
}
//------------------------
static void uart_consume()
{
uint8_t ch[64];
//ZivDebug while (uart_read_bytes(EX_UART_NUM, ch, 64, 100 / portTICK_RATE_MS) > 0) ;
//ZivDebug_Start
int len=0;
unsigned int Elsp=millis();
while ((millis()-Elsp<100 / portTICK_RATE_MS)||(len<64)) {
if (Serial.available()) {
ch[len]=Serial.read();
#ifdef ENDEBUG
Serial2.print("ESP32 RCV2:");
Serial2.print(ch[len],HEX);
Serial2.println(" ");
#endif
len++;
}
}
//ZivDebug_End
}
//--------------------------------
static uint32_t Send_Byte (char c)
{
//ZivDebug uart_write_bytes(EX_UART_NUM, &c, 1);
#ifdef ENDEBUG
Serial2.print("ESP32 send:");
Serial2.print(c,HEX);
Serial2.println(" ");
#endif
Serial.write(c); //ZivDebug
return 0;
}
//----------------------------
static void send_CA ( void ) {
Send_Byte(CA);
Send_Byte(CA);
}
//-----------------------------
static void send_ACK ( void ) {
Send_Byte(ACK);
}
//----------------------------------
static void send_ACKCRC16 ( void ) {
Send_Byte(ACK);
Send_Byte(CRC16);
}
//-----------------------------
static void send_NAK ( void ) {
Send_Byte(NAK);
}
//-------------------------------
static void send_CRC16 ( void ) {
//Serial2.print("SNDCRC16");
Send_Byte(CRC16);
}
/**
* @brief Receive a packet from sender
* @param data
* @param timeout
* @param length
* >0: packet length
* 0: end of transmission
* -1: abort by sender
* -2: error or crc error
* @retval 0: normally return
* -1: timeout
* -2: abort by user
*/
//--------------------------------------------------------------------------
static int32_t Receive_Packet (uint8_t *data, int *length, uint32_t timeout)
{
int count, packet_size, i;
unsigned char ch;
*length = 0;
//Serial2.print("Receive_Packet:");
// receive 1st byte
if (Receive_Byte(&ch, timeout) < 0) {
return -1;
}
//Serial2.print("Rcv5:");
//Serial2.println(ch,HEX);
switch (ch) {
case SOH:
packet_size = PACKET_SIZE;
break;
case STX:
packet_size = PACKET_1K_SIZE;
break;
case EOT:
*length = 0;
return 0;
case CA:
//Serial2.print("CA:");
if (Receive_Byte(&ch, timeout) < 0) {
return -2;
}
if (ch == CA) {
*length = -1;
return 0;
}
else return -1;
case ABORT1:
case ABORT2:
return -2;
default:
vTaskDelay(100 / portTICK_RATE_MS);
uart_consume();
return -1;
}
*data = (uint8_t)ch;
uint8_t *dptr = data+1;
count = packet_size + PACKET_OVERHEAD-1;
//Serial2.print("Rcv3:");
//Serial2.println(count);
for (i=0; i<count; i++) {
if (Receive_Byte(&ch, timeout) < 0) {
return -1;
}
*dptr++ = (uint8_t)ch;;
}
//Serial2.print("Rcv4:");
//Serial2.println(i);
if (data[PACKET_SEQNO_INDEX] != ((data[PACKET_SEQNO_COMP_INDEX] ^ 0xff) & 0xff)) {
*length = -2;
return 0;
}
if (crc16(&data[PACKET_HEADER], packet_size + PACKET_TRAILER) != 0) {
*length = -2;
return 0;
}
*length = packet_size;
//Serial2.print("Rcv2:");
//Serial2.println(packet_size);
return 0;
}
// Receive a file using the ymodem protocol.
//-----------------------------------------------------------------
int Ymodem_Receive (FILE *ffd, unsigned int maxsize, char* getname)
{
uint8_t packet_data[PACKET_1K_SIZE + PACKET_OVERHEAD];
uint8_t *file_ptr;
char file_size[128];
unsigned int i, file_len, write_len, session_done, file_done, packets_received, errors, size = 0;
int packet_length = 0;
file_len = 0;
int eof_cnt = 0;
for (session_done = 0, errors = 0; ;) {
for (packets_received = 0, file_done = 0; ;) {
//LED_toggle();
switch (Receive_Packet(packet_data, &packet_length, NAK_TIMEOUT)) {
case 0: // normal return
switch (packet_length) {
case -1:
// Abort by sender
send_ACK();
size = -1;
goto exit;
case -2:
// error
errors ++;
if (errors > 5) {
send_CA();
size = -2;
goto exit;
}
send_NAK();
break;
case 0:
// End of transmission
eof_cnt++;
if (eof_cnt == 1) {
send_NAK();
}
else {
send_ACKCRC16();
}
break;
default:
// ** Normal packet **
if (eof_cnt > 1) {
send_ACK();
}
else if ((packet_data[PACKET_SEQNO_INDEX] & 0xff) != (packets_received & 0x000000ff)) {
errors ++;
if (errors > 5) {
send_CA();
size = -3;
goto exit;
}
send_NAK();
}
else {
if (packets_received == 0) {
// ** First packet, Filename packet **
if (packet_data[PACKET_HEADER] != 0) {
errors = 0;
// ** Filename packet has valid data
if (getname) {
for (i = 0, file_ptr = packet_data + PACKET_HEADER; ((*file_ptr != 0) && (i < 64));) {
*getname = *file_ptr++;
getname++;
}
*getname = '\0';
}
for (i = 0, file_ptr = packet_data + PACKET_HEADER; (*file_ptr != 0) && (i < packet_length);) {
file_ptr++;
}
for (i = 0, file_ptr ++; (*file_ptr != ' ') && (i < FILE_SIZE_LENGTH);) {
file_size[i++] = *file_ptr++;
}
file_size[i++] = '\0';
if (strlen(file_size) > 0) size = strtol(file_size, NULL, 10);
else size = 0;
// Test the size of the file
if ((size < 1) || (size > maxsize)) {
// End session
send_CA();
if (size > maxsize) size = -9;
else size = -4;
goto exit;
}
file_len = 0;
send_ACKCRC16();
}
// Filename packet is empty, end session
else {
errors ++;
if (errors > 5) {
send_CA();
size = -5;
goto exit;
}
send_NAK();
}
}
else {
// ** Data packet **
// Write received data to file
if (file_len < size) {
file_len += packet_length; // total bytes received
if (file_len > size) {
write_len = packet_length - (file_len - size);
file_len = size;
}
else write_len = packet_length;
//ZivDebug int written_bytes = fwrite((char*)(packet_data + PACKET_HEADER), 1, write_len, ffd);
int written_bytes=write_len;
if (written_bytes != write_len) { //failed
/* End session */
send_CA();
size = -6;
goto exit;
}
//LED_toggle();
}
//success
errors = 0;
send_ACK();
}
packets_received++;
}
}
break;
case -2: // user abort
send_CA();
size = -7;
goto exit;
default: // timeout
if (eof_cnt > 1) {
file_done = 1;
}
else {
errors ++;
if (errors > MAX_ERRORS) {
send_CA();
size = -8;
goto exit;
}
send_CRC16();
}
}
if (file_done != 0) {
session_done = 1;
break;
}
}
if (session_done != 0) break;
}
exit:
#if YMODEM_LED_ACT
gpio_set_level(YMODEM_LED_ACT, YMODEM_LED_ACT_ON ^ 1);
#endif
return size;
}
//------------------------------------------------------------------------------------
static void Ymodem_PrepareIntialPacket(uint8_t *data, char *fileName, uint32_t length)
{
uint16_t tempCRC;
memset(data, 0, PACKET_SIZE + PACKET_HEADER);
// Make first three packet
data[0] = SOH;
data[1] = 0x00;
data[2] = 0xff;
// add filename
sprintf((char *)(data+PACKET_HEADER), "%s", fileName);
//add file site
sprintf((char *)(data + PACKET_HEADER + strlen((char *)(data+PACKET_HEADER)) + 1), "%d", length);
data[PACKET_HEADER + strlen((char *)(data+PACKET_HEADER)) +
1 + strlen((char *)(data + PACKET_HEADER + strlen((char *)(data+PACKET_HEADER)) + 1))] = ' ';
// add crc
tempCRC = crc16(&data[PACKET_HEADER], PACKET_SIZE);
data[PACKET_SIZE + PACKET_HEADER] = tempCRC >> 8;
data[PACKET_SIZE + PACKET_HEADER + 1] = tempCRC & 0xFF;
}
//-------------------------------------------------
static void Ymodem_PrepareLastPacket(uint8_t *data)
{
uint16_t tempCRC;
memset(data, 0, PACKET_SIZE + PACKET_HEADER);
data[0] = SOH;
data[1] = 0x00;
data[2] = 0xff;
tempCRC = crc16(&data[PACKET_HEADER], PACKET_SIZE);
//tempCRC = crc16_le(0, &data[PACKET_HEADER], PACKET_SIZE);
data[PACKET_SIZE + PACKET_HEADER] = tempCRC >> 8;
data[PACKET_SIZE + PACKET_HEADER + 1] = tempCRC & 0xFF;
}
//-----------------------------------------------------------------------------------------
static void Ymodem_PreparePacket(uint8_t *data, uint8_t pktNo, uint32_t sizeBlk, FILE *ffd)
{
uint16_t i, size;
uint16_t tempCRC;
data[0] = STX;
data[1] = (pktNo & 0x000000ff);
data[2] = (~(pktNo & 0x000000ff));
size = sizeBlk < PACKET_1K_SIZE ? sizeBlk :PACKET_1K_SIZE;
// Read block from file
if (size > 0) {
//ZivDebug size = fread(data + PACKET_HEADER, 1, size, ffd);
//ZivDebug_Start
for (i=0;i<size;i++){data[PACKET_HEADER+i]=i;}
//ZivDebug_End
}
if ( size < PACKET_1K_SIZE) {
for (i = size + PACKET_HEADER; i < PACKET_1K_SIZE + PACKET_HEADER; i++) {
data[i] = 0x00; // EOF (0x1A) or 0x00
}
}
tempCRC = crc16(&data[PACKET_HEADER], PACKET_1K_SIZE);
//tempCRC = crc16_le(0, &data[PACKET_HEADER], PACKET_1K_SIZE);
data[PACKET_1K_SIZE + PACKET_HEADER] = tempCRC >> 8;
data[PACKET_1K_SIZE + PACKET_HEADER + 1] = tempCRC & 0xFF;
}
//-------------------------------------------------------------
static uint8_t Ymodem_WaitResponse(uint8_t ackchr, uint8_t tmo)
{
unsigned char receivedC;
uint32_t errors = 0;
do {
if (Receive_Byte(&receivedC, NAK_TIMEOUT) == 0) {
if (receivedC == ackchr) {
return 1;
}
else if (receivedC == CA) {
send_CA();
return 2; // CA received, Sender abort
}
else if (receivedC == NAK) {
return 3;
}
else {
return 4;
}
}
else {
errors++;
}
}while (errors < tmo);
return 0;
}
//------------------------------------------------------------------------
int Ymodem_Transmit (char* sendFileName, unsigned int sizeFile, FILE *ffd)
{
uint8_t packet_data[PACKET_1K_SIZE + PACKET_OVERHEAD];
uint16_t blkNumber;
unsigned char receivedC;
int i, err;
uint32_t size = 0;
// Wait for response from receiver
err = 0;
do {
Send_Byte(CRC16);
//LED_toggle();
} while (Receive_Byte(&receivedC, NAK_TIMEOUT) < 0 && err++ < 45);
if (err >= 45 || receivedC != CRC16) {
send_CA();
return -1;
}
// === Prepare first block and send it =======================================
/* When the receiving program receives this block and successfully
* opened the output file, it shall acknowledge this block with an ACK
* character and then proceed with a normal YMODEM file transfer
* beginning with a "C" or NAK tranmsitted by the receiver.
*/
Ymodem_PrepareIntialPacket(packet_data, sendFileName, sizeFile);
do
{
// Send Packet
//ZivDebug uart_write_bytes(EX_UART_NUM, (char *)packet_data, PACKET_SIZE + PACKET_OVERHEAD);
//ZivDebug_Start
//Serial2.print("ESP32 send:");
// for (int i=0;i<PACKET_SIZE + PACKET_OVERHEAD;i++) {
// Serial2.print(packet_data[i],HEX);
// Serial2.print(" ");
// }
for (int i=0;i<PACKET_SIZE + PACKET_OVERHEAD;i++) {
Serial.write(packet_data[i]);
}
//ZivDebug_End
// Wait for Ack
err = Ymodem_WaitResponse(ACK, 10);
if (err == 0 || err == 4) {
send_CA();
return -2; // timeout or wrong response
}
else if (err == 2) return 98; // abort
//LED_toggle();
}while (err != 1);
// After initial block the receiver sends 'C' after ACK
if (Ymodem_WaitResponse(CRC16, 10) != 1) {
send_CA();
return -3;
}
// === Send file blocks ======================================================
size = sizeFile;
blkNumber = 0x01;
// Resend packet if NAK for a count of 10 else end of communication
while (size)
{
// Prepare and send next packet
Ymodem_PreparePacket(packet_data, blkNumber, size, ffd);
do
{
//uart_write_bytes(EX_UART_NUM, (char *)packet_data, PACKET_1K_SIZE + PACKET_OVERHEAD);
//ZivDebug_Start
//Serial2.print("ESP32 send:");
//for (int i=0;i<PACKET_1K_SIZE + PACKET_OVERHEAD;i++) {
// Serial2.print(packet_data[i],HEX);
// Serial2.print(" ");
//}
//Serial2.println(" ");
for (int i=0;i<PACKET_1K_SIZE + PACKET_OVERHEAD;i++) {
Serial.write(packet_data[i]);
}
//ZivDebug_End
// Wait for Ack
err = Ymodem_WaitResponse(ACK, 10);
if (err == 1) {
blkNumber++;
if (size > PACKET_1K_SIZE) size -= PACKET_1K_SIZE; // Next packet
else size = 0; // Last packet sent
}
else if (err == 0 || err == 4) {
send_CA();
return -4; // timeout or wrong response
}
else if (err == 2) return -5; // abort
}while(err != 1);
//LED_toggle();
}
// === Send EOT ==============================================================
Send_Byte(EOT); // Send (EOT)
// Wait for Ack
do
{
// Wait for Ack
err = Ymodem_WaitResponse(ACK, 10);
if (err == 3) { // NAK
Send_Byte(EOT); // Send (EOT)
}
else if (err == 0 || err == 4) {
send_CA();
return -6; // timeout or wrong response
}
else if (err == 2) return -7; // abort
}while (err != 1);
// === Receiver requests next file, prepare and send last packet =============
if (Ymodem_WaitResponse(CRC16, 10) != 1) {
send_CA();
return -8;
}
//LED_toggle();
Ymodem_PrepareLastPacket(packet_data);
do
{
// Send Packet
//ZivDebug uart_write_bytes(EX_UART_NUM, (char *)packet_data, PACKET_SIZE + PACKET_OVERHEAD);
//ZivDebug_Start
//Serial2.print("ESP32 send:");
//for (int i=0;i<PACKET_SIZE + PACKET_OVERHEAD;i++) {
// Serial2.print(packet_data[i],HEX);
// Serial2.print(" ");
//}
//Serial2.println("");
for (int i=0;i<PACKET_SIZE + PACKET_OVERHEAD;i++) {
Serial.write(packet_data[i]);
}
//ZivDebug_End
// Wait for Ack
err = Ymodem_WaitResponse(ACK, 10);
if (err == 0 || err == 4) {
send_CA();
return -9; // timeout or wrong response
}
else if (err == 2) return -10; // abort
}while (err != 1);
#if YMODEM_LED_ACT
gpio_set_level(YMODEM_LED_ACT, YMODEM_LED_ACT_ON ^ 1);
#endif
return 0; // file transmitted successfully
}
void setup() {
Serial.begin(921600);
Serial2.begin(115200);
}
void loop() {
char Filename[20];
int sizesnd=Ymodem_Receive (NULL, 60*1024*1024, Filename);
Serial2.print("Send bytes=");
Serial2.println(sizesnd);
}
使用 Windows XP 的超级终端测试,在 921600 波特率情况下(超级终端支持的最高频率),传输速度可以达到 34KBytes/s。
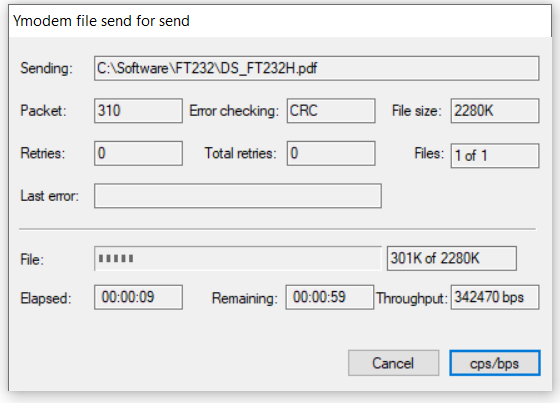
DFRobot 的 FireBeetle 上面使用的是 CH340C,最高可以支持 2,000,000的波特率。但是