做了一个很简单的小东西,用的是taobao上君悦智控【参考1】的 “JY901串口9轴加速度计\陀螺仪 MPU6050 姿态角度测量模块 卡尔曼”。用MPU6050可以很容易的获得角速度,但是如果没有算法的支撑,得到的RAW数据根本没法用。我之前试图用Arduino直接做一个能够测量摆动的装置,发现得到的数据非常糟糕。

这个模块上有加速度和陀螺仪加上地磁仪器,还有一个单片机,内部有他们自己设计的算法,处理之后从串口送出结果,就是各种姿态速度信息了。
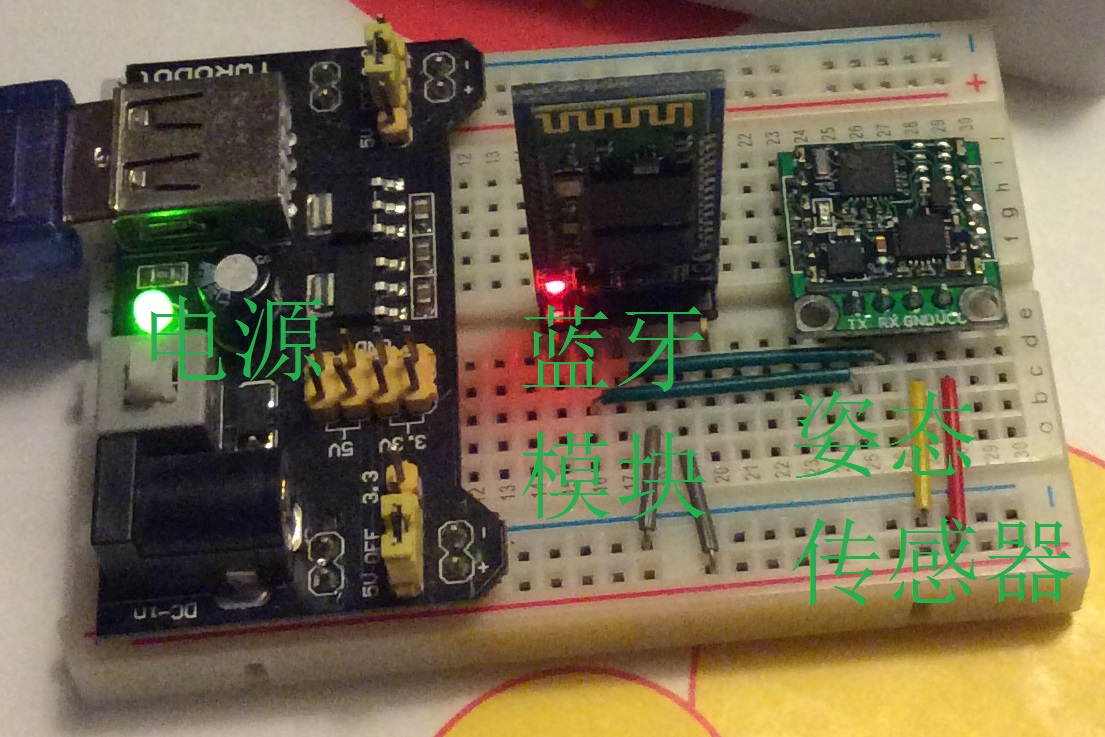
我用这个模块,直接做了一个原型,通过usb接口供电(上面是电池,下面黑色的是一个usb取电装置,用这个装置只是因为上面有USB母头,可以方便的取电而已)。

大概介绍一下是三部分
演示是在Windows平板电脑上,只要有蓝牙接口的Windows都可以运行
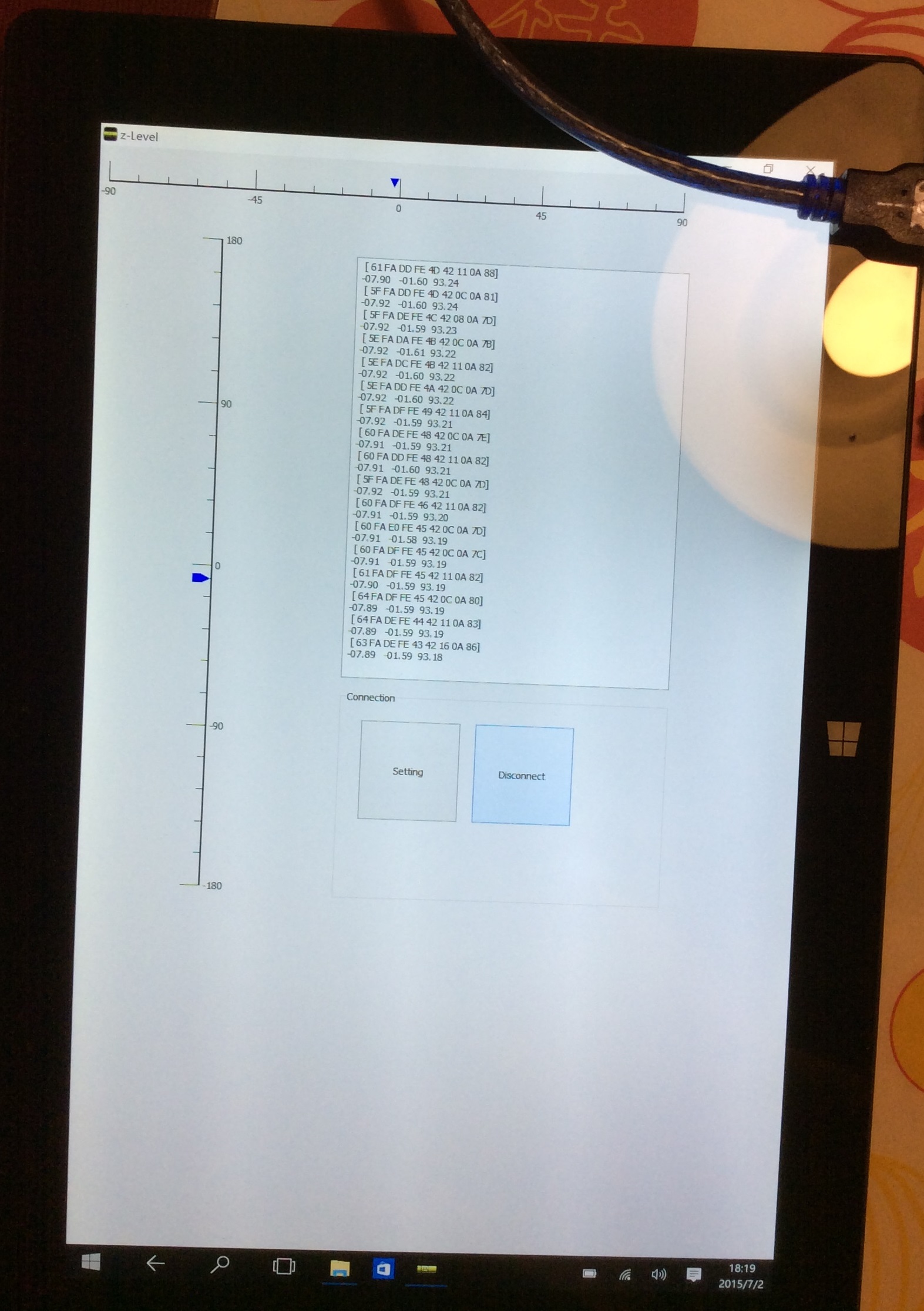
上位机使用Delphi编写,源程序下载
工作的视频
http://www.tudou.com/programs/view/t_cxuhLU2hw/?resourceId=414535982_06_02_99
http://www.tudou.com/programs/view/z2Rq0ND_ARM/?resourceId=414535982_06_02_99
补充一下电路连接,直接把串口用蓝牙送出去,非常简单
参考:
1.http://robotcontrol.taobao.com/
MPU6050 不实用?
不能说不实用,只能说比较难用吧。
或者说直接适用范围比较小。
个人感觉。
把传感器立成90度(pitch 90度),检测数据能否也能稳定在90度?
你的视频根本体现不出来精度。
建议你直接问问卖家哈