MPR121 是一款触摸传感器芯片,原理是通过检测电容变化来判断当前是否有触摸(接近)。
主要电器特性如下【参考1】:
1. 工作电压1.71-3.6v(芯片工作电压)
2. 通讯接口为 I2C
3. 12个检测端口
4. 带有1个 IRQ端口
我是在Taobao购买的模块,价格是16元【参考3】。经过搜索,这是仿sparkfun的,更多资料可以在【参考2】看到。
模块长得下面这样,有一个降压芯片,看起来可以直接使用 5V 供电。上面有12个口,可以接12个触摸按钮。IRQ 的作用是发出中断通知上面有触摸。ADD是芯片的I2C地址选择,接GND VDD SDA或者 SCL 地址分别是 0x5A 0x5B 0x5C 和 0x5D【来自参考4】。
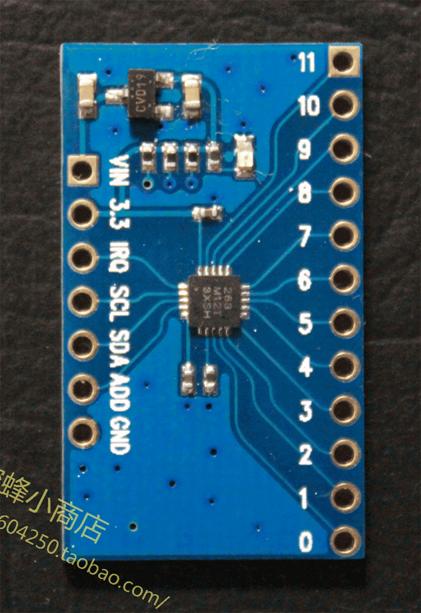
图片来自【参考2】
下面的代码可以正常工作(卖家的例程,有一些修改可以在 1.6.0 上编译通过)
#include "mpr121.h"
#include <Wire.h>
#define SENSORS 13
#define TOU_THRESH 0x1F
#define REL_THRESH 0x1A
#define PROX_THRESH 0x3f
#define PREL_THRESH 0x3c
// variables: capacitive sensing
bool touchStates[SENSORS]; // holds the current touch/prox state of all sensors
bool activeSensors[SENSORS] = {1,1,1,1,1,1,1,1,1,1,1,1,1}; // holds which sensors are active (0=inactive, 1=active)
bool newData = false; // flag that is set to true when new data is available from capacitive sensor
int irqpin = 2; // pin that connects to notifies when data is available from capacitive sensor
void setup(){
// attach interrupt to pin - interrupt 1 is on pin 2 of the arduino (confusing I know)
attachInterrupt(0, dataAvailable, FALLING);
// set-up the Serial and I2C/Wire connections
Serial.begin(9600);
Wire.begin();
// set the registers on the capacitive sensing IC
setupCapacitiveRegisters();
}
void loop(){
readCapacitiveSensor();
}
/**
* dataAvailable Callback method that runs whenever new data becomes available on from the capacitive sensor.
* This method was attached to the interrupt on pin 2, and is called whenever that pins goes low.
*/
void dataAvailable() {
newData = true;
}
/**
* readCapacitiveSensor Reads the capacitive sensor values from the MP121 IC. It makes a request to
* the sensor chip via the I2C/Wire connection, and then parses the sensor values which are stored on
* the first 13 bits of the 16-bit response msg.
*/
void readCapacitiveSensor(){
if(newData){
Serial.println("yes");
//read the touch state from the MPR121
Wire.requestFrom(0x5A,2);
byte tLSB = Wire.read();
byte tMSB = Wire.read();
uint16_t touched = ((tMSB << 8) | tLSB); //16bits that make up the touch states
for (int i = 0; i < SENSORS; i++){ // Check what electrodes were pressed
if (activeSensors[i] == 0) continue;
char sensor_id [] = {'\0','\0','\0'};
switch (i) {
case 12:
sensor_id[0] = 'P';
break;
default:
if (i < 10) {
sensor_id[0] = char( i+48 );
}
else if (i < 12) {
sensor_id[0] = char('1');
sensor_id[1] = char( ( i % 10 ) + 48 );
}
}
if (sensor_id != '\0') {
// read the humidity level
// if current sensor was touched (check appropriate bit on touched var)
if(touched & (1<<i)){
// if current pin was not previously touched send a serial message
if(touchStates[i] == 0){
Serial.print(sensor_id);
Serial.print(":");
Serial.println("1");
}
touchStates[i] = 1;
} else {
// if current pin was just touched send serial message
if(touchStates[i] == 1){
Serial.print(sensor_id);
Serial.print(":");
Serial.println("0");
}
touchStates[i] = 0;
}
}
}
newData = false;
}
}
/**
* setupCapacitiveRegisters Updates all of configurations on the MP121 capacitive sensing IC. This includes
* setting levels for all filters, touch and proximity sensing activation and release thresholds, debounce,
* and auto-configurations options. At the end it activates all of the electrodes.
*/
void setupCapacitiveRegisters(){
set_register(0x5A, ELE_CFG, 0x00);
// Section A - filtering when data is > baseline.
// touch sensing
set_register(0x5A, MHD_R, 0x01);
set_register(0x5A, NHD_R, 0x01);
set_register(0x5A, NCL_R, 0x00);
set_register(0x5A, FDL_R, 0x00);
// prox sensing
set_register(0x5A, PROX_MHDR, 0xFF);
set_register(0x5A, PROX_NHDAR, 0xFF);
set_register(0x5A, PROX_NCLR, 0x00);
set_register(0x5A, PROX_FDLR, 0x00);
// Section B - filtering when data is < baseline.
// touch sensing
set_register(0x5A, MHD_F, 0x01);
set_register(0x5A, NHD_F, 0x01);
set_register(0x5A, NCL_F, 0xFF);
set_register(0x5A, FDL_F, 0x02);
// prox sensing
set_register(0x5A, PROX_MHDF, 0x01);
set_register(0x5A, PROX_NHDAF, 0x01);
set_register(0x5A, PROX_NCLF, 0xFF);
set_register(0x5A, PROX_NDLF, 0xFF);
// Section C - Sets touch and release thresholds for each electrode
set_register(0x5A, ELE0_T, TOU_THRESH);
set_register(0x5A, ELE0_R, REL_THRESH);
set_register(0x5A, ELE1_T, TOU_THRESH);
set_register(0x5A, ELE1_R, REL_THRESH);
set_register(0x5A, ELE2_T, TOU_THRESH);
set_register(0x5A, ELE2_R, REL_THRESH);
set_register(0x5A, ELE3_T, TOU_THRESH);
set_register(0x5A, ELE3_R, REL_THRESH);
set_register(0x5A, ELE4_T, TOU_THRESH);
set_register(0x5A, ELE4_R, REL_THRESH);
set_register(0x5A, ELE5_T, TOU_THRESH);
set_register(0x5A, ELE5_R, REL_THRESH);
set_register(0x5A, ELE6_T, TOU_THRESH);
set_register(0x5A, ELE6_R, REL_THRESH);
set_register(0x5A, ELE7_T, TOU_THRESH);
set_register(0x5A, ELE7_R, REL_THRESH);
set_register(0x5A, ELE8_T, TOU_THRESH);
set_register(0x5A, ELE8_R, REL_THRESH);
set_register(0x5A, ELE9_T, TOU_THRESH);
set_register(0x5A, ELE9_R, REL_THRESH);
set_register(0x5A, ELE10_T, TOU_THRESH);
set_register(0x5A, ELE10_R, REL_THRESH);
set_register(0x5A, ELE11_T, TOU_THRESH);
set_register(0x5A, ELE11_R, REL_THRESH);
// Section D - Set the touch filter Configuration
set_register(0x5A, FIL_CFG, 0x04);
// Section E - Set proximity sensing threshold and release
set_register(0x5A, PRO_T, PROX_THRESH); // sets the proximity sensor threshold
set_register(0x5A, PRO_R, PREL_THRESH); // sets the proximity sensor release
// Section F - Set proximity sensor debounce
set_register(0x59, PROX_DEB, 0x50); // PROX debounce
// Section G - Set Auto Config and Auto Reconfig for prox sensing
set_register(0x5A, ATO_CFGU, 0xC9); // USL = (Vdd-0.7)/vdd*256 = 0xC9 @3.3V
set_register(0x5A, ATO_CFGL, 0x82); // LSL = 0.65*USL = 0x82 @3.3V
set_register(0x5A, ATO_CFGT, 0xB5); // Target = 0.9*USL = 0xB5 @3.3V
set_register(0x5A, ATO_CFG0, 0x0B);
// Section H - Start listening to all electrodes and the proximity sensor
set_register(0x5A, ELE_CFG, 0x3C);
}
/**
* set_register Sets a register on a device connected via I2C. It accepts the device's address,
* register location, and the register value.
* @param address The address of the I2C device
* @param r The register's address on the I2C device
* @param v The new value for the register
*/
void set_register(int address, unsigned char r, unsigned char v){
Wire.beginTransmission(address);
Wire.write(r);
Wire.write(v);
Wire.endTransmission();
}
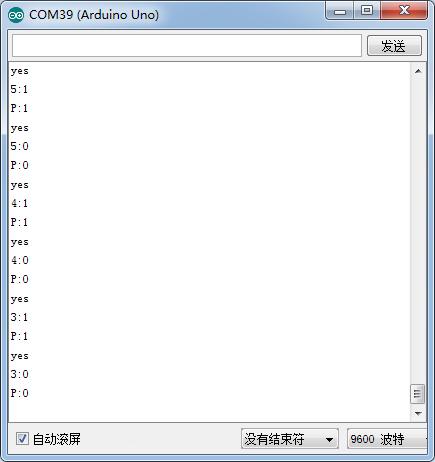
运行结果:
完整的代码下载
参考:
1. http://wenku.baidu.com/link?url=77EtEpflHOBF9LmqwOvIwe5ONZ6I548h4BcBk4Ep1XWVO_RVDj9fycwoku44RENseV48lzvnrnDasY3UAMHsBuuU7yVdxFsAfxq-zbDiEhy MPR121中文数据手册
2. https://learn.sparkfun.com/tutorials/mpr121-hookup-guide
3. https://item.taobao.com/item.htm?spm=a1z09.2.0.0.kpoNRc&id=19968128319&_u=pkf8s90f4c
4. MPR121 DataSheet
===============================================================================
额外说一下这个传感器在 Pro Micro 上的连接方法:
1. Pro Micro 的中断:“The Pro Micro has five external interrupts, which allow you to instantly trigger a function when a pin goes either high or low (or both). If you attach an interrupt to an interrupt-enabled pin, you’ll need to know the specific interrupt that pin triggers: pin 3 maps to interrupt 0, pin 2 is interrupt 1, pin 0 is interrupt 2, pin 1 is interrupt 3, and pin 7 is interrupt 4.”
推荐 使用 Pin7-Interrupt 4
2. Pro Micro Pin2- SDA Pin3-SCL