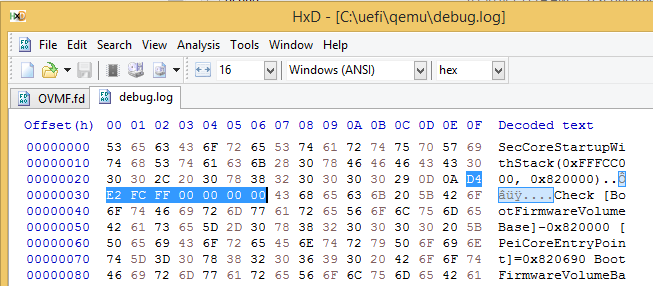
书接上回,下面的语句输出了第一条 Debug Log,它位于 SecMain.c 中:
DEBUG ((DEBUG_INFO,
"SecCoreStartupWithStack(0x%x, 0x%x)\n",
(UINT32)(UINTN)BootFv,
(UINT32)(UINTN)TopOfCurrentStack
));
接下来就使用下面的语句跳转到SecStartupPhase2中:
//
// Initialize Debug Agent to support source level debug in SEC/PEI phases before memory ready.
//
InitializeDebugAgent (DEBUG_AGENT_INIT_PREMEM_SEC, &SecCoreData, SecStartupPhase2);
这个函数位于 \MdeModulePkg\Library\DebugAgentLibNull\DebugAgentLibNull.c,从代码上看到就是一个跳转而已:
/**
Initialize debug agent.
This function is used to set up debug environment to support source level debugging.
If certain Debug Agent Library instance has to save some private data in the stack,
this function must work on the mode that doesn't return to the caller, then
the caller needs to wrap up all rest of logic after InitializeDebugAgent() into one
function and pass it into InitializeDebugAgent(). InitializeDebugAgent() is
responsible to invoke the passing-in function at the end of InitializeDebugAgent().
If the parameter Function is not NULL, Debug Agent Library instance will invoke it by
passing in the Context to be its parameter.
If Function() is NULL, Debug Agent Library instance will return after setup debug
environment.
@param[in] InitFlag Init flag is used to decide the initialize process.
@param[in] Context Context needed according to InitFlag; it was optional.
@param[in] Function Continue function called by debug agent library; it was
optional.
**/
VOID
EFIAPI
InitializeDebugAgent (
IN UINT32 InitFlag,
IN VOID *Context, OPTIONAL
IN DEBUG_AGENT_CONTINUE Function OPTIONAL
)
{
if (Function != NULL) {
Function (Context);
}
}
继续在 SecMain.c中执行SecStartupPhase2() 函数,这个函数负责找到 PEI Core 的 Entry Point
/**
Caller provided function to be invoked at the end of InitializeDebugAgent().
Entry point to the C language phase of SEC. After the SEC assembly
code has initialized some temporary memory and set up the stack,
the control is transferred to this function.
@param[in] Context The first input parameter of InitializeDebugAgent().
**/
VOID
EFIAPI
SecStartupPhase2(
IN VOID *Context
)
其中的跳转代码如下:
//
// Transfer the control to the PEI core
//
(*PeiCoreEntryPoint) (SecCoreData, (EFI_PEI_PPI_DESCRIPTOR *)&mPrivateDispatchTable);
其中 PeiCoreEntryPoint 类型是 EFI_PEI_CORE_ENTRY_POINT ,定义可以在 \mdepkg\include\pi\PiPeiCis.h 看到:
/**
The entry point of PEI Foundation.
This function is the entry point for the PEI Foundation, which
allows the SEC phase to pass information about the stack,
temporary RAM and the Boot Firmware Volume. In addition, it also
allows the SEC phase to pass services and data forward for use
during the PEI phase in the form of one or more PPIs. These PPI's
will be installed and/or immediately signaled if they are
notification type. There is no limit to the number of additional
PPIs that can be passed from SEC into the PEI Foundation. As part
of its initialization phase, the PEI Foundation will add these
SEC-hosted PPIs to its PPI database such that both the PEI
Foundation and any modules can leverage the associated service
calls and/or code in these early PPIs.
@param SecCoreData Points to a data structure containing
information about the PEI core's
operating environment, such as the size
and location of temporary RAM, the stack
location and the BFV location.
@param PpiList Points to a list of one or more PPI
descriptors to be installed initially by
the PEI core. An empty PPI list consists
of a single descriptor with the end-tag
EFI_PEI_PPI_DESCRIPTOR_TERMINATE_LIST.
As part of its initialization phase, the
PEI Foundation will add these SEC-hosted
PPIs to its PPI database such that both
the PEI Foundation and any modules can
leverage the associated service calls
and/or code in these early PPIs.
**/
typedef
VOID
(EFIAPI *EFI_PEI_CORE_ENTRY_POINT)(
IN CONST EFI_SEC_PEI_HAND_OFF *SecCoreData,
IN CONST EFI_PEI_PPI_DESCRIPTOR *PpiList
);
接下来的跳转进入\MdePkg\Library\PeiCoreEntryPoint\PeiCoreEntryPoint.c 中的ModuleEntryPoint()
/**
The entry point of PE/COFF Image for the PEI Core.
This function is the entry point for the PEI Foundation, which allows the SEC phase
to pass information about the stack, temporary RAM and the Boot Firmware Volume.
In addition, it also allows the SEC phase to pass services and data forward for use
during the PEI phase in the form of one or more PPIs.
There is no limit to the number of additional PPIs that can be passed from SEC into
the PEI Foundation. As part of its initialization phase, the PEI Foundation will add
these SEC-hosted PPIs to its PPI database such that both the PEI Foundation and any
modules can leverage the associated service calls and/or code in these early PPIs.
This function is required to call ProcessModuleEntryPointList() with the Context
parameter set to NULL. ProcessModuleEntryPoint() is never expected to return.
The PEI Core is responsible for calling ProcessLibraryConstructorList() as soon as
the PEI Services Table and the file handle for the PEI Core itself have been established.
If ProcessModuleEntryPointList() returns, then ASSERT() and halt the system.
@param SecCoreData Points to a data structure containing information about the
PEI core's operating environment, such as the size and
location of temporary RAM, the stack location and the BFV
location.
@param PpiList Points to a list of one or more PPI descriptors to be
installed initially by the PEI core. An empty PPI list
consists of a single descriptor with the end-tag
EFI_PEI_PPI_DESCRIPTOR_TERMINATE_LIST.
As part of its initialization phase, the PEI Foundation will
add these SEC-hosted PPIs to its PPI database, such that both
the PEI Foundation and any modules can leverage the associated
service calls and/or code in these early PPIs.
**/
VOID
EFIAPI
_ModuleEntryPoint(
IN CONST EFI_SEC_PEI_HAND_OFF *SecCoreData,
IN CONST EFI_PEI_PPI_DESCRIPTOR *PpiList
)
{
ProcessModuleEntryPointList (SecCoreData, PpiList, NULL);
//
// Should never return
//
ASSERT(FALSE);
CpuDeadLoop ();
}
函数中会调用一个构造函数:
\Build\OvmfX64\NOOPT_VS2015x86\X64\MdeModulePkg\Core\Pei\PeiMain\DEBUG\AutoGen.c
VOID
EFIAPI
ProcessModuleEntryPointList (
IN CONST EFI_SEC_PEI_HAND_OFF *SecCoreData,
IN CONST EFI_PEI_PPI_DESCRIPTOR *PpiList,
IN VOID *Context
)
{
PeiCore (SecCoreData, PpiList, Context);
}
最终,跳入位于\MdeModulePkg\Core\Pei\PeiMain\PeiMain.c中的如下函数:
/**
This routine is invoked by main entry of PeiMain module during transition
from SEC to PEI. After switching stack in the PEI core, it will restart
with the old core data.
@param SecCoreDataPtr Points to a data structure containing information about the PEI core's operating
environment, such as the size and location of temporary RAM, the stack location and
the BFV location.
@param PpiList Points to a list of one or more PPI descriptors to be installed initially by the PEI core.
An empty PPI list consists of a single descriptor with the end-tag
EFI_PEI_PPI_DESCRIPTOR_TERMINATE_LIST. As part of its initialization
phase, the PEI Foundation will add these SEC-hosted PPIs to its PPI database such
that both the PEI Foundation and any modules can leverage the associated service
calls and/or code in these early PPIs
@param Data Pointer to old core data that is used to initialize the
core's data areas.
If NULL, it is first PeiCore entering.
**/
VOID
EFIAPI
PeiCore (
IN CONST EFI_SEC_PEI_HAND_OFF *SecCoreDataPtr,
IN CONST EFI_PEI_PPI_DESCRIPTOR *PpiList,
IN VOID *Data
)
前面可以看到,这里是通过 ProcessModuleEntryPointList (SecCoreData, PpiList, NULL); 进行调用的,因此,这里Data==NULL,所以也是第一次运行:
//
// Retrieve context passed into PEI Core
//
OldCoreData = (PEI_CORE_INSTANCE *) Data;
SecCoreData = (EFI_SEC_PEI_HAND_OFF *) SecCoreDataPtr;
//
// Perform PEI Core phase specific actions.
//
if (OldCoreData == NULL) {
//
// If OldCoreData is NULL, means current is the first entry into the PEI Core before memory is available.
//
ZeroMem (&PrivateData, sizeof (PEI_CORE_INSTANCE));
PrivateData.Signature = PEI_CORE_HANDLE_SIGNATURE;
CopyMem (&PrivateData.ServiceTableShadow, &gPs, sizeof (gPs));
}
其中PrivateData 是 PEI_CORE_INSTANCE PrivateData; 其中 PEI_CORE_INSTANCE 定义在PeiMain.h 中报错了 Pei Core 的一些信息,比如:当前 Fv中的 FFS 个数等等。第一次进入PeiCore 的时候(OldCoreData == NULL),代码会准备PrivateData的内容。