微软的 MU 项目提供了一个 Shell 下的截图工具:PrintScreenLogger,具体的介绍可以在下面看到:
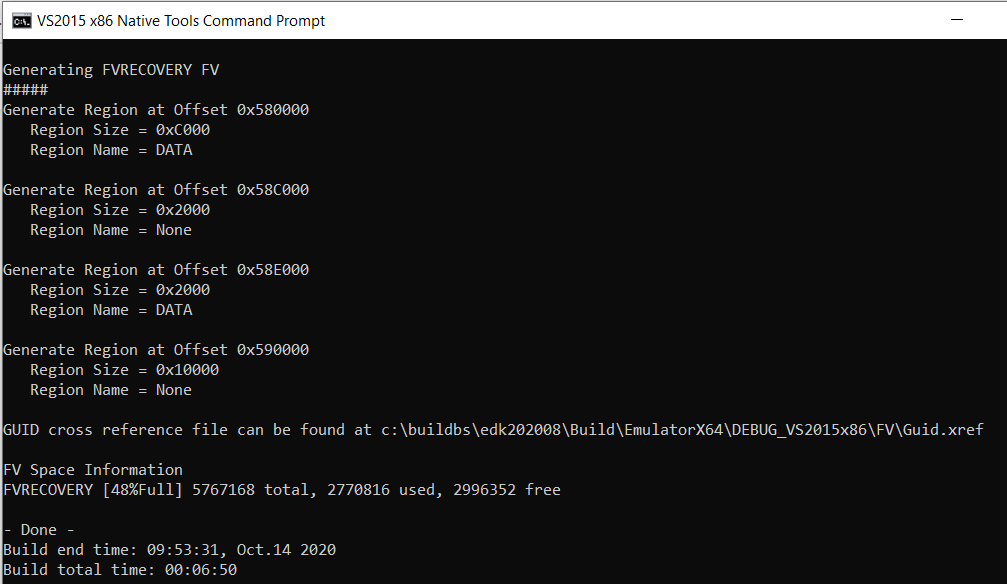
我尝试直接在 AppPkg 下编译了一下,可以通过编译。然后在实体机上进行了测试工作正常:
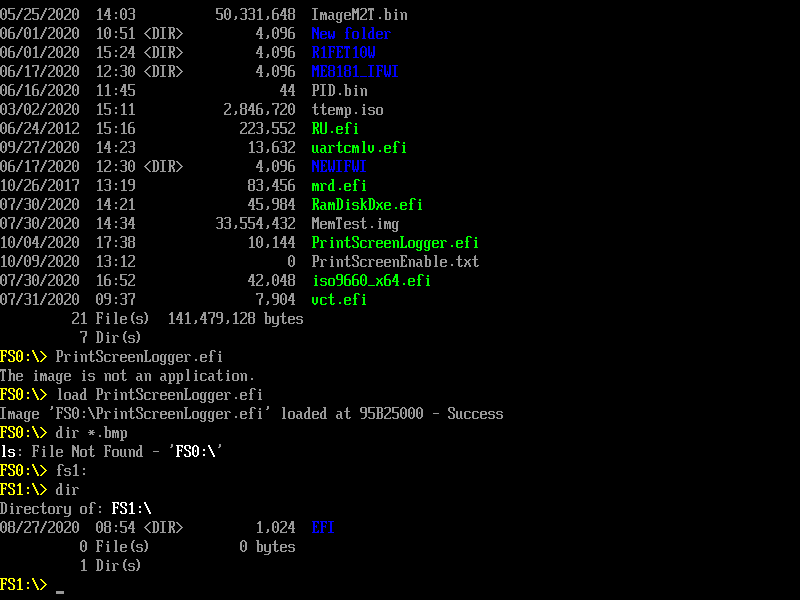
使用方法:
- 在你需要存放截图的盘上放置名为 PrintScreenEnable.txt 的文件(空文件即可),运行之后这个工具会将截图结果放置在存着这个文件的盘上;
- 使用 Load PrintScreenLogger.efi 加载(因为这个是一个 Driver);
- 截图快捷键是 ctrl + screen print ;
源代码来自 https://github.com/microsoft/mu_plus/tree/release/202005/MsGraphicsPkg/PrintScreenLogger:
/** @file
PrintScreenLogger.c
PrintScreen logger to capture UEFI menus into a BMP written to a USB key
Copyright (C) Microsoft Corporation. All rights reserved.
SPDX-License-Identifier: BSD-2-Clause-Patent
**/
#include "PrintScreenLogger.h"
typedef struct {
EFI_KEY_DATA KeyData;
EFI_HANDLE NotifyHandle;
} PRINT_SCREEN_KEYS;
//
// PrtScreen comes in as an EFI_SYS_REQUEST shift state.
//
// Register two notifications, one for a RightCtrl-PrtScn and one for a LeftCtrl-PrtScn
//
STATIC PRINT_SCREEN_KEYS gPrtScnKeys[] = {
{
{
{0,0},
{EFI_SHIFT_STATE_VALID | EFI_LEFT_CONTROL_PRESSED | EFI_SYS_REQ_PRESSED, 0}
},
NULL
},
{
{
{0,0},
{EFI_SHIFT_STATE_VALID | EFI_RIGHT_CONTROL_PRESSED | EFI_SYS_REQ_PRESSED, 0}
},
NULL
}
};
#define NUMBER_KEY_NOTIFIES (sizeof(gPrtScnKeys)/sizeof(PRINT_SCREEN_KEYS))
// Global variables.
//
STATIC EFI_SIMPLE_TEXT_INPUT_EX_PROTOCOL *gTxtInEx = NULL;
STATIC EFI_EVENT gTimerEvent = NULL;
/**
Scan USB Drives looking for a file named PrintScreenEnable.txt. The presence
of this file indicates it is OK to write print screen files to this drive.
@param Fs_Handle Handle to the opened volume.
@retval EFI_SUCCESS The FS volume was opened successfully.
@retval Others The operation failed.
**/
EFI_STATUS
FindUsbDriveForPrintScreen (
OUT EFI_FILE_PROTOCOL **VolumeHandle
)
{
EFI_FILE_PROTOCOL *FileHandle;
EFI_FILE_PROTOCOL *VolHandle;
EFI_HANDLE *HandleBuffer;
UINTN Index;
UINTN NumHandles;
EFI_STATUS Status;
EFI_STATUS Status2;
EFI_DEVICE_PATH_PROTOCOL *BlkIoDevicePath;
EFI_DEVICE_PATH_PROTOCOL *UsbDevicePath;
EFI_SIMPLE_FILE_SYSTEM_PROTOCOL *SfProtocol;
EFI_HANDLE Handle;
NumHandles = 0;
HandleBuffer = NULL;
SfProtocol = NULL;
//
// Locate all handles that are using the SFS protocol.
//
Status = gBS->LocateHandleBuffer(ByProtocol,
&gEfiSimpleFileSystemProtocolGuid,
NULL,
&NumHandles,
&HandleBuffer);
if (EFI_ERROR(Status) != FALSE) {
DEBUG((DEBUG_ERROR, "%a: failed to locate any handles using the Simple FS protocol (%r)\n", __FUNCTION__, Status));
goto CleanUp;
}
//
// Search the handles to find one that has has a USB node in the device path.
//
for (Index = 0; (Index < NumHandles); Index += 1) {
//
// Insure this device is on a USB controller
//
UsbDevicePath = DevicePathFromHandle(HandleBuffer[Index]);
if (UsbDevicePath == NULL) {
continue;
}
Status = gBS->LocateDevicePath (&gEfiUsbIoProtocolGuid,
&UsbDevicePath,
&Handle);
if (EFI_ERROR(Status)) {
// Device is not USB;
continue;
}
//
// Check if this is a block IO device path.
//
BlkIoDevicePath = DevicePathFromHandle(HandleBuffer[Index]);
if (BlkIoDevicePath == NULL) {
continue;
}
Status = gBS->LocateDevicePath(&gEfiBlockIoProtocolGuid,
&BlkIoDevicePath,
&Handle);
if (EFI_ERROR(Status)) {
// Device is not BlockIo;
continue;
}
Status = gBS->HandleProtocol(HandleBuffer[Index],
&gEfiSimpleFileSystemProtocolGuid,
(VOID**)&SfProtocol);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "%a: Failed to locate Simple FS protocol. %r\n", __FUNCTION__, Status));
continue;
}
//
// Open the volume/partition.
//
Status = SfProtocol->OpenVolume(SfProtocol, &VolHandle);
if (EFI_ERROR(Status) != FALSE) {
DEBUG((DEBUG_ERROR,"%a: Unable to open SimpleFileSystem. Code = %r\n", __FUNCTION__, Status));
continue;
}
//
// Insure the PrinteScreenEnable.txt file is present
//
Status = VolHandle->Open (VolHandle, &FileHandle, PRINT_SCREEN_ENABLE_FILENAME, EFI_FILE_MODE_READ, 0);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_INFO,"%a: Print Screen not supported to this device. Code = %r\n", __FUNCTION__, Status));
Status2 = VolHandle->Close (VolHandle);
if (EFI_ERROR(Status2)) {
DEBUG((DEBUG_ERROR,"%a: Error closing Vol Handle. Code = %r\n", __FUNCTION__, Status2));
}
continue;
}
FileHandle->Close (FileHandle);
*VolumeHandle = VolHandle;
Status = EFI_SUCCESS;
break;
}
CleanUp:
if (HandleBuffer != NULL) {
FreePool(HandleBuffer);
}
return Status;
}
/**
Convert a Gop 32 bits per pixel video frame buffer to a
24 bits per pixel *.BMP graphics image
@param BmpFileName Name of file to create
@param Gop GRAPHICS_OUTPUT_PROTOCOL
@param BltBuffer Buffer containing GOP version of BmpImage.
@retval EFI_SUCCESS GopBlt and GopBltSize are returned.
@retval EFI_UNSUPPORTED BmpImage is not a valid *.BMP image
@retval EFI_BUFFER_TOO_SMALL The passed in GopBlt buffer is not big enough.
GopBltSize will contain the required size.
@retval EFI_OUT_OF_RESOURCES No enough buffer to allocate.
**/
EFI_STATUS
WriteBmpToFile (
IN EFI_FILE_PROTOCOL *FileHandle
) {
EFI_STATUS Status;
BMP_IMAGE_HEADER *BmpHeader;
UINTN DataSizePerLine;
UINTN BmpBufferSize;
UINT8 *Image;
EFI_GRAPHICS_OUTPUT_BLT_PIXEL *Blt;
EFI_GRAPHICS_OUTPUT_BLT_PIXEL *BltBuffer;
UINT32 Height;
UINT32 Width;
UINT64 WriteSize;
EFI_GRAPHICS_OUTPUT_PROTOCOL *Gop;
#define BMP_BITS_PER_PIXEL 24
BmpHeader = NULL;
BltBuffer = NULL;
Status = gBS->LocateProtocol (&gEfiGraphicsOutputProtocolGuid,
NULL,
(VOID **)&Gop
);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "Unable to locate Gop protocol\n"));
return Status;
}
if ((Gop->Mode->Info->PixelFormat != PixelRedGreenBlueReserved8BitPerColor) &&
(Gop->Mode->Info->PixelFormat != PixelBlueGreenRedReserved8BitPerColor)) {
DEBUG((DEBUG_ERROR, "%a: Unsupported video mode\n", __FUNCTION__));
return EFI_UNSUPPORTED;
}
BltBuffer = (EFI_GRAPHICS_OUTPUT_BLT_PIXEL *) AllocatePool (Gop->Mode->FrameBufferSize);
if (NULL == BltBuffer) {
return EFI_OUT_OF_RESOURCES;
}
Height = Gop->Mode->Info->VerticalResolution;
Width = Gop->Mode->Info->HorizontalResolution;
Status = Gop->Blt (Gop,
BltBuffer,
EfiBltVideoToBltBuffer,
0,
0,
0,
0,
Width,
Height,
0
);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "Unable to BLt video to buffer, code=%r\n",Status));
goto ErrorExit;
}
DataSizePerLine = ((Gop->Mode->Info->HorizontalResolution * BMP_BITS_PER_PIXEL + 31) >> 3) & (~0x3);
BmpBufferSize = MultU64x32 (DataSizePerLine, Gop->Mode->Info->VerticalResolution) + sizeof(BMP_IMAGE_HEADER) + ((sizeof(BMP_IMAGE_HEADER) + 3) & ~0x03);
if (BmpBufferSize > (UINT32) ~0) {
Status = EFI_INVALID_PARAMETER;
goto ErrorExit;
}
BmpHeader = AllocateZeroPool (BmpBufferSize); // Insure unfilled area is zeroed
if (NULL == BmpHeader) {
Status = EFI_OUT_OF_RESOURCES;
goto ErrorExit;
}
Status = EFI_SUCCESS;
BmpHeader->CharB = 'B'; // Header flag
BmpHeader->CharM = 'M';
BmpHeader->Size = (UINT32) BmpBufferSize;
BmpHeader->Reserved[0] = 0;
BmpHeader->Reserved[1] = 0;
BmpHeader->ImageOffset = (sizeof(BMP_IMAGE_HEADER) + 3) & ~0x03; // Start first row on 4 byte boundary
BmpHeader->HeaderSize = sizeof (BMP_IMAGE_HEADER) - OFFSET_OF(BMP_IMAGE_HEADER, HeaderSize);
BmpHeader->PixelWidth = Width;
BmpHeader->PixelHeight = Height;
BmpHeader->Planes = 1;
BmpHeader->BitPerPixel = 24;
BmpHeader->CompressionType = 0; // Not Compressed
BmpHeader->ImageSize = 0;
BmpHeader->XPixelsPerMeter = 11000; // Approximately 300 dpi
BmpHeader->YPixelsPerMeter = 11000;
BmpHeader->NumberOfColors = 0;
BmpHeader->ImportantColors = 0;
Image = ((UINT8 *) BmpHeader) + BmpHeader->ImageOffset;
for (Height = 0; Height < BmpHeader->PixelHeight; Height++) {
Blt = &BltBuffer[(BmpHeader->PixelHeight - Height - 1) * BmpHeader->PixelWidth];
for (Width = 0; Width < BmpHeader->PixelWidth; Width++, Blt++) {
if (Gop->Mode->Info->PixelFormat == PixelRedGreenBlueReserved8BitPerColor) {
*Image++ = Blt->Red;
*Image++ = Blt->Green;
*Image++ = Blt->Blue;
} else { // PixelBlueGreenRedReserved8BitPerColor
*Image++ = Blt->Blue;
*Image++ = Blt->Green;
*Image++ = Blt->Red;
}
}
Image = (UINT8 *)( ((UINT64)Image + 3) & ~0x03); // Start next row on 4 byte boundary.
}
WriteSize = BmpBufferSize;
Status = FileHandle->Write (FileHandle, &WriteSize, BmpHeader);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "Error writing Bmp file. Code=%r\n", Status));
}
if (WriteSize != BmpBufferSize) {
DEBUG((DEBUG_ERROR, "Wrong number of bytes written. S/B=%ld, Actual=%ld\n", BmpBufferSize, WriteSize));
Status = EFI_BAD_BUFFER_SIZE;
}
ErrorExit:
if (BltBuffer != NULL) {
FreePool (BltBuffer);
}
if (BmpHeader != NULL) {
FreePool (BmpHeader );
}
return Status;
}
/**
Handler for hot key notification
@param KeyData A pointer to a buffer that is filled in with the keystroke
information for the key that was pressed.
@retval EFI_SUCCESS Always - Return code is not used by SimpleText providers.
**/
EFI_STATUS
EFIAPI
PrintScreenCallback (
IN EFI_KEY_DATA *KeyData
)
{
EFI_FILE_PROTOCOL *FileHandle;
UINTN Index;
CHAR16 PrtScrnFileName[] = L"PrtScreen####.bmp";
EFI_STATUS Status;
EFI_STATUS Status2;
EFI_FILE_PROTOCOL *VolumeHandle;
// We only register two keys - LeftCtrl-PrtScn and RightCtrl-PrtScn.
// Assume print screen function if this function is called.
DEBUG((DEBUG_INFO,"%a: Starting PrintScreen capture. Sc=%x, Uc=%x, Sh=%x, Ts=%x\n",
__FUNCTION__,
KeyData->Key.ScanCode,
KeyData->Key.UnicodeChar,
KeyData->KeyState.KeyShiftState,
KeyData->KeyState.KeyToggleState));
Status = gBS->CheckEvent (gTimerEvent);
if (Status == EFI_NOT_READY) {
DEBUG((DEBUG_INFO,"Print Screen request ignored\n"));
return EFI_SUCCESS;
}
//
// 1. Find a suitable USB drive - one that has PrintScreenEnable.txt on it.
//
Status = FindUsbDriveForPrintScreen(&VolumeHandle);
if (!EFI_ERROR(Status)) {
//
// 2. Find the first value of PrtScreen#### that is available
//
Index = 0;
do {
Index++;
if (Index > MAX_PRINT_SCREEN_FILES) {
goto Exit;
}
UnicodeSPrint (PrtScrnFileName, sizeof (PrtScrnFileName), L"PrtScreen%04d.bmp", Index);
Status = VolumeHandle->Open (VolumeHandle, &FileHandle, PrtScrnFileName, EFI_FILE_MODE_READ, 0);
if (!EFI_ERROR(Status)) {
if (Index % PRINT_SCREEN_DEBUG_WARNING == 0) {
DEBUG((DEBUG_INFO,"%a: File %s exists. Trying again\n", __FUNCTION__, PrtScrnFileName));
}
Status2 = FileHandle->Close (FileHandle);
if (EFI_ERROR(Status2)) {
DEBUG((DEBUG_ERROR,"%a: Error closing File Handle. Code = %r\n", __FUNCTION__, Status2));
}
continue;
}
if (Status == EFI_NOT_FOUND) {
break;
}
} while (TRUE);
//
// 3. Create the new file that will contain the bitmap
//
Status = VolumeHandle->Open (VolumeHandle, &FileHandle, PrtScrnFileName, EFI_FILE_MODE_READ | EFI_FILE_MODE_WRITE | EFI_FILE_MODE_CREATE, EFI_FILE_ARCHIVE);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR,"%a: Unable to create file %s. Code = %r\n", __FUNCTION__, PrtScrnFileName, Status));
goto Exit;
}
//
// 4. Write the contents of the display to the new file
//
Status = WriteBmpToFile (FileHandle);
if (!EFI_ERROR(Status)) {
DEBUG((DEBUG_INFO,"%a: Screen captured to file %s.\n", __FUNCTION__, PrtScrnFileName));
}
//
// 4. Close the bitmap file
//
Status2 = FileHandle->Close (FileHandle);
if (EFI_ERROR(Status2)) {
DEBUG((DEBUG_ERROR,"%a: Error closing bit map file %s. Code = %r\n", __FUNCTION__, PrtScrnFileName, Status2));
}
Exit:
//
// 5. Close the USB volume
//
Status2 = VolumeHandle->Close (VolumeHandle);
if (EFI_ERROR(Status2)) {
DEBUG((DEBUG_ERROR,"%a: Error closing Vol Handle. Code = %r\n", __FUNCTION__, Status2));
}
}
// Ignore future PrtScn requests for some period. This is due to the make
// and break of PrtScn being identical, and it takes a few seconds to complete
// a single screen capture.
Status = gBS->SetTimer (gTimerEvent, TimerRelative, PRINT_SCREEN_DELAY);
return EFI_SUCCESS;
}
/**
Unregister TxtIn callbacks and end the timer
**/
VOID
UnRegisterNotifications (
VOID
) {
INTN i;
EFI_STATUS Status;
for (i = 0; i < NUMBER_KEY_NOTIFIES; i++) {
if (gPrtScnKeys[i].NotifyHandle != NULL) {
Status = gTxtInEx->UnregisterKeyNotify (gTxtInEx, gPrtScnKeys[i].NotifyHandle);
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "%a: Unable to uninstall TxtIn Notify. Code = %r\n", __FUNCTION__, Status));
}
}
}
if (gTimerEvent != NULL) {
gBS->SetTimer (gTimerEvent, TimerCancel, 0);
gBS->CloseEvent (gTimerEvent);
}
}
/**
Callback to cleanup the driver on unload.
@param Event Not Used.
@param Context Not Used.
@retval None
**/
EFI_STATUS
EFIAPI
PrintScreenLoggerUnload (
IN EFI_HANDLE ImageHandle
)
{
DEBUG((DEBUG_INFO, "%a: unloading...\n", __FUNCTION__));
UnRegisterNotifications ();
return EFI_SUCCESS;
}
/**
Main entry point for this driver.
@param ImageHandle Image handle of this driver.
@param SystemTable Pointer to the system table.
@retval EFI_STATUS Always returns EFI_SUCCESS.
**/
EFI_STATUS
EFIAPI
PrintScreenLoggerEntry (
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
)
{
EFI_STATUS Status = EFI_NOT_FOUND;
INTN i;
DEBUG((DEBUG_LOAD, "%a: enter...\n", __FUNCTION__));
//
// 1. Get access to ConSplitter's TextInputEx protocol
//
if (gST->ConsoleInHandle != NULL) {
Status = gBS->OpenProtocol (
gST->ConsoleInHandle,
&gEfiSimpleTextInputExProtocolGuid,
(VOID **) &gTxtInEx,
ImageHandle,
NULL,
EFI_OPEN_PROTOCOL_BY_HANDLE_PROTOCOL);
}
if (EFI_ERROR(Status)) {
DEBUG((DEBUG_ERROR, "%a: Unable to access TextInputEx protocol. Code = %r\n", __FUNCTION__, Status));
} else {
//
// 2. Register for PrtScn callbacks
//
for (i = 0; i < NUMBER_KEY_NOTIFIES; i++) {
Status = gTxtInEx->RegisterKeyNotify (
gTxtInEx,
&gPrtScnKeys[i].KeyData,
PrintScreenCallback,
&gPrtScnKeys[i].NotifyHandle);
if (EFI_ERROR (Status)) {
DEBUG ((DEBUG_ERROR, "%a: Error registering key %d. Code = %r\n", __FUNCTION__, i, Status));
break;
}
}
if (!EFI_ERROR(Status)) {
//
// 3. Create the PrtScn hold off timer
//
Status = gBS->CreateEvent(
EVT_TIMER,
0,
NULL,
NULL,
&gTimerEvent);
if (!EFI_ERROR(Status)) {
//
// 4. Place event into the signaled state indicating PrtScn is active.
//
Status = gBS->SignalEvent (gTimerEvent);
}
}
if (!EFI_ERROR(Status)) {
DEBUG((DEBUG_INFO, "%a: exit. Ready for Ctl-PrtScn operation\n", __FUNCTION__));
} else {
UnRegisterNotifications ();
DEBUG((DEBUG_ERROR, "%a: exit with errors. Ctl-PrtScn not operational. Code=%r\n", __FUNCTION__, Status));
}
}
return EFI_SUCCESS;
}
完整代码下载:
编译后的 X64 EFI 下载:






{kind=link}