最近用船型开关做了一个矩阵键盘,电路图如下:
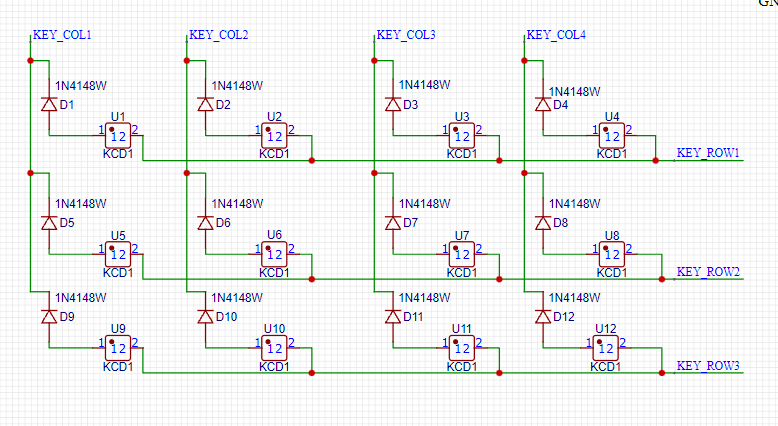
简单的说就是 KEY_ROW1-3 轮流为 HIGH 然后通过读取 KEY_COL1 引脚的电平就能得到当前开关状态。编写的取得按键信息的代码如下:
int GetPressed() {
int result = 0;
digitalWrite(KEY_ROW1, HIGH);
digitalWrite(KEY_ROW2, LOW);
digitalWrite(KEY_ROW3, LOW);
// Upper line
result = (digitalRead(KEY_COL1) << 3) +
(digitalRead(KEY_COL2) << 2) +
(digitalRead(KEY_COL3) << 1) +
digitalRead(KEY_COL4);
// Middle line
digitalWrite(KEY_ROW1, LOW);
digitalWrite(KEY_ROW2, HIGH);
digitalWrite(KEY_ROW3, LOW);
result = ((digitalRead(KEY_COL1) << 3) +
(digitalRead(KEY_COL2) << 2) +
(digitalRead(KEY_COL3) << 1) +
(digitalRead(KEY_COL4))) +
result * 10;
// Buttom line
digitalWrite(KEY_ROW1, LOW);
digitalWrite(KEY_ROW2, LOW);
digitalWrite(KEY_ROW3, HIGH);
result = (digitalRead(KEY_COL1) << 3) +
(digitalRead(KEY_COL2) << 2) +
(digitalRead(KEY_COL3) << 1) +
(digitalRead(KEY_COL4) << 0) +
result * 10;
return result;
}
调试中我惊奇的发现每次读取KEY_COL1的值竟然不同,示意如下:
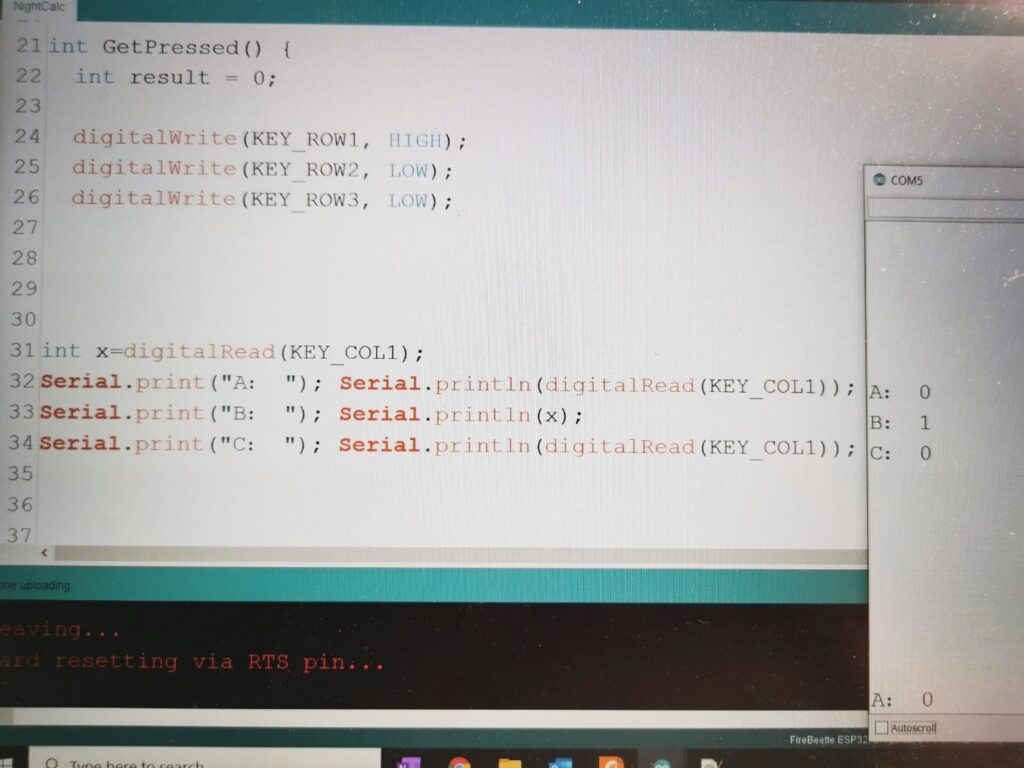
即使我将 digitalRead直接写成(GPIO.in >> KEY_COL1) & 0x1 也有同样的现象。
于是针对这个问题做了如下实验:
- 直接在 FireBeetle上跑,不插入在矩阵键盘中,无现象;
- 将 x 定义为全局变量,同样现象;
- 试图关掉ESP32 的编译优化功能,没有找到对应项目
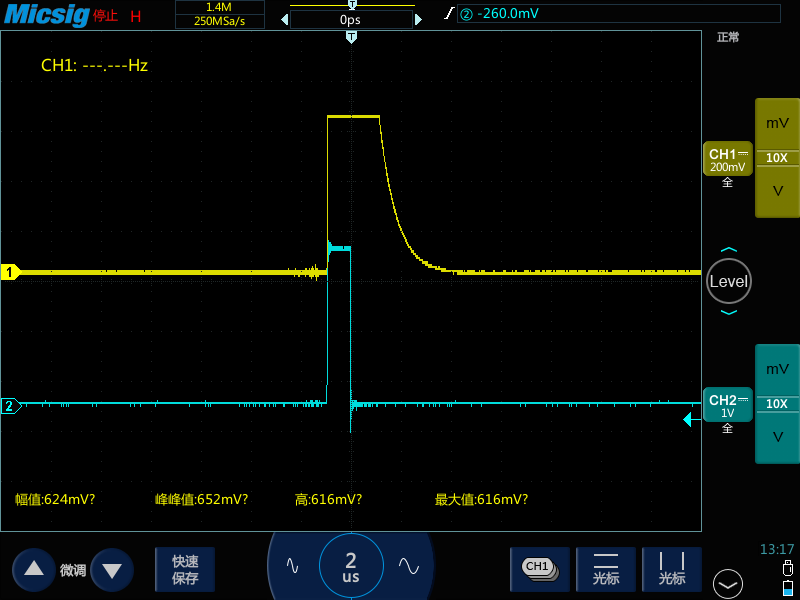
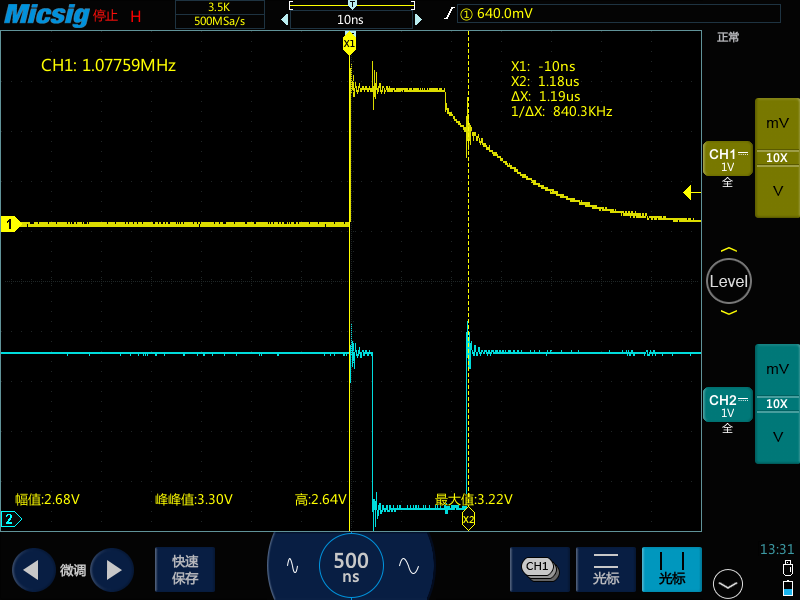
从1的结果判断这个问题和我的硬件是有关的,最终拿出了示波器,果真,上了之后能够看到如下波形(黄色是KEY_COL1,绿色是KEY_ROW1):可以看到当拉高之后接收端马上变高,但是拉低之后过了很久才会降低。于是怀疑的点就是读取太快,上一个拉高的影响还没有完全结束,导致了误判。
有了上面的猜想就编写一个代码, 不断拉高ROW1 和 ROW3 ,然后看看是否会出现这样的问题,结果显示:如果一个 ROW上有一个按键是闭合的,那么另外一个 ROW的读取很大概率产生误判。
digitalWrite(KEY_ROW1, HIGH);
digitalWrite(KEY_ROW2, LOW);
digitalWrite(KEY_ROW3, LOW);
c1=(digitalRead(KEY_COL1) << 3) +
(digitalRead(KEY_COL2) << 2) +
(digitalRead(KEY_COL3) << 1) +
digitalRead(KEY_COL4);
digitalWrite(KEY_ROW1, LOW);
digitalWrite(KEY_ROW2, LOW);
digitalWrite(KEY_ROW3, HIGH);
c2=(digitalRead(KEY_COL1) << 3) +
(digitalRead(KEY_COL2) << 2) +
(digitalRead(KEY_COL3) << 1) +
digitalRead(KEY_COL4);
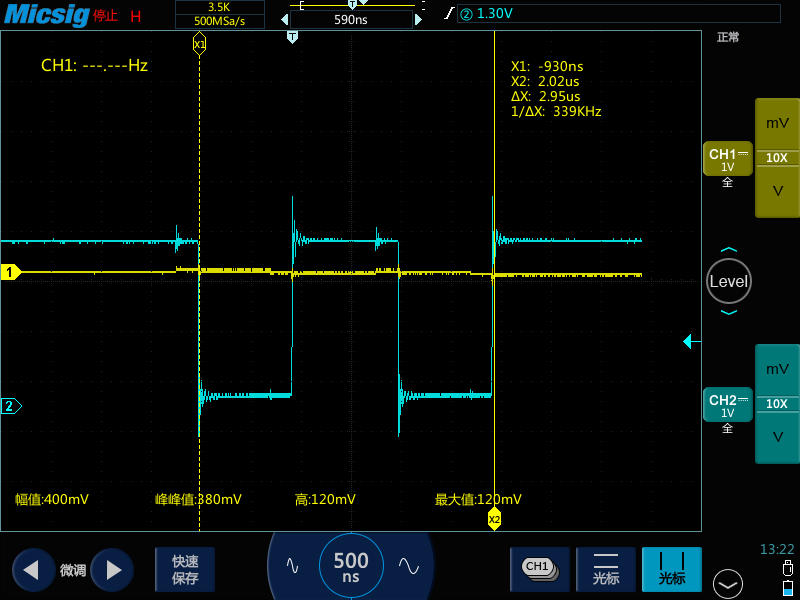
下面黄色是KEY_COL1 Pin (读取)和KEY_ROW3(发送)的波形图(我的示波器只有两个通道),可以看到ROW1拉高的影响持续了到KEY_ROW3的发生,因此再次读取 KEY_COL1的结果是错误的。
找到了原因问题就好解决了,每次 digitalRead() 之后加一个一个 delay 让它完成放电就能保证结果的正确性了。
所谓
矩阵键盘惹人愁,
现象诡异结果谬。
I/O 若水不停歇,
CPU更快似光流。