一些情况下,我们需要得知操作消耗的时间,比如:通过硬盘读写操作耗费的时间能够计算出硬盘的速度。针对这个问题,之前有过研究,例如:GetTime 研究【参考1】、EADK clock()【参考2】。这里再次进行研究。
首先,在MdePkg\Include\Library\TimerLib.h给出了下面两个函数:
/**
Retrieves the current value of a 64-bit free running performance counter.
The counter can either count up by 1 or count down by 1. If the physical
performance counter counts by a larger increment, then the counter values
must be translated. The properties of the counter can be retrieved from
GetPerformanceCounterProperties().
@return The current value of the free running performance counter.
**/
UINT64
EFIAPI
GetPerformanceCounter (
VOID
);
/**
Converts elapsed ticks of performance counter to time in nanoseconds.
This function converts the elapsed ticks of running performance counter to
time value in unit of nanoseconds.
@param Ticks The number of elapsed ticks of running performance counter.
@return The elapsed time in nanoseconds.
**/
UINT64
EFIAPI
GetTimeInNanoSecond (
IN UINT64 Ticks
);
/**
Retrieves the current value of a 64-bit free running performance counter.
The counter can either count up by 1 or count down by 1. If the physical
performance counter counts by a larger increment, then the counter values
must be translated. The properties of the counter can be retrieved from
GetPerformanceCounterProperties().
@return The current value of the free running performance counter.
**/
UINT64
EFIAPI
GetPerformanceCounter (
VOID
);
/**
Converts elapsed ticks of performance counter to time in nanoseconds.
This function converts the elapsed ticks of running performance counter to
time value in unit of nanoseconds.
@param Ticks The number of elapsed ticks of running performance counter.
@return The elapsed time in nanoseconds.
**/
UINT64
EFIAPI
GetTimeInNanoSecond (
IN UINT64 Ticks
);
其中的GetPerformanceCounter() 返回CPU 当前经过的计数值或者说多少个 Ticks,GetTimeInNanoSecond() 函数能将经过的计数值转化为纳秒为单位的时间。
编写一个 UEFI Shell代码进行测试:
1. 在AppPkg.dsc 中加入 TimerLib
CacheMaintenanceLib|MdePkg/Library/BaseCacheMaintenanceLib/BaseCacheMaintenanceLib.inf
TimerLib|UefiCpuPkg/Library/CpuTimerLib/BaseCpuTimerLib.inf
###################################################################################################
#
# Components Section - list of the modules and components that will be processed by compilation
#
2.编写代码如下:
#include <Uefi.h>
#include <Library/UefiLib.h>
#include <Library/ShellCEntryLib.h>
#include <Library/TimerLib.h>
#include <Library/UefiBootServicesTableLib.h>
INTN
EFIAPI
ShellAppMain (
IN UINTN Argc,
IN CHAR16 **Argv
)
{
UINT64 Start=GetPerformanceCounter();
gBS->Stall(1000000UL);
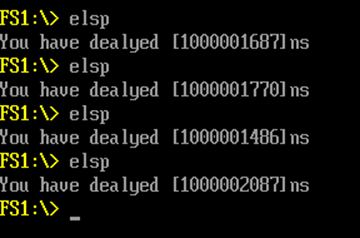
Print(L"You have dealyed [%llu]ns\n",
GetTimeInNanoSecond(GetPerformanceCounter()-Start));
return(0);
}
具体动作就是首先保存当前的 CPU 计数值,然后延时 1s, 最后输出以纳秒为单位的经过时间。可以看到每次运行耗时会有一点波动。
因为没有使用 CLIB , 所以 Build出来代码体积也比较小,只有9KB.
参考: